基于激光点云的风机叶片无人机自主巡检策略研究
2021-10-27温晗王剑
温 晗 王 剑
(河北华电沽源风电有限公司,张家口 075000)
随着新能源行业的不断发展,风力电场日常巡检的重要性日益提升。针对目前风场风机叶片的巡检状况,提出采用无人机自主巡检模式,以提高巡检效率和降低运维成本。如何确定风机叶片故障的空间位置,获得准确且安全的飞行路径,是自主巡检的核心[1]。
1 激光雷达巡检
激光雷达(Light Detection and Ranging,LiDAR)测量技术作为获取三维地理信息的新型技术,能够很好地规避因风机叶片纹理特征不够丰富而无法进行图像特征提取与匹配等问题[2]。以激光雷达发射脉冲激光作为探测信号,当激光光束遇到物体后,经过漫反射返回至激光接收器。雷达模块根据发送和接收信号的时间间隔乘以光速再除以2,即可计算出发射器与物体之间的距离。
激光雷达按照激光线束的不同,可分为单线激光雷达和多线激光雷达。其中:单线激光雷达数据缺少一个维度,只能描述线状信息,无法描述面;多线激光雷达包含多条激光线束,轮询多个激光发射器,在一个轮询周期后得到一帧的激光点云数据。多条点云数据可以组成面状信息,从而获取障碍物的高度信息。根据单帧的点云坐标,可得到障碍物的距离信息。根据多帧的点云坐标,对距离信息做微分处理,可得到障碍物的速度信息。
在实际的风电巡检中,无人机搭载360°多线激光雷达,可获取风机主体的三维点云数据。为了剔除不必要的背景和噪声影响,可根据无人机和风机平面水平距离S和风机叶片长度L,计算得到包含风机主体的、用于分割前景和背景点云的最小阈值T。另外,由于实际飞行时无人机和风机平面朝向并不严格垂直,因此需要适当放宽该分割阈值[3]。结合无人机与风机水平间距S和风叶长度L的阈值的计算示意图,如图1所示。

图1 点云分割阈值计算示意图
通过数学形态学方法对前景中离散噪点进行滤波处理。这种滤波算法中窗口大小的选择对滤波效果存在重要影响,可以根据无人机与风机间距动态选取。通过先膨胀后腐蚀的闭运算方式,可将相邻的数据点构成连通域后再剔除离散噪点[4]。
2 激光点云数据分析及路径规划
由于激光雷达得到的点云分布并不规则,在三维空间的分布形态呈现为离散的数据点,使用欧几里得聚类方法对风叶主体进行聚合得到风机主体形状。修正无人机的位姿,确保无人机飞行轨迹能够与风机保持平行。通过对聚类后的点云求平均值,可得到轮毂中心的准确位置,再根据轮毂中心是否在塔筒轴线上进行偏航角度的判断。
由于每个风机静止时风叶位置具有不确定性,因此需要在无人机处于预设距离时根据可见光相机采集到的风机主体预先估算出每个叶片所处的位置。由于塔筒的安装角度都是固定的,以雷达点云确定的风机主体作为感兴趣区域,剔除其余部分的可见光数据。此时,可见光图像将只保留风叶、轮毂以及塔筒区域,因此可将塔筒作为参考,计算某一叶片与塔筒之间的夹角,进而推算出其余叶片的位置。
3 故障诊断及定位
无人机进行图像采集时,会先定位到风力发电机轮毂位置,并在到达检测指定距离后,以轮毂中心作为原点采集第一幅图像,然后按照特定时间和间隔不断沿着一个方向对所有经过的风叶拍照进行图像采集。在拍摄时刻,飞控会记录当时的无人机位置,并和记录的原点位置做差,从而得到图像相对于原点的实际偏移量。当图像中存在缺陷时,可直接查询缺陷所在图像的实际偏移量。由于该偏移量反映的是图像中心的值,且缺陷与图像中心并非属于同一位置,因此通过图像偏移量只可实现对缺陷的粗定位[5]。如图2所示,X和Y代表了缺陷所在图像相对于原点(表示为五角星)的偏移量,如果用其作为缺陷位置,则会与其实际位置存在一定的偏差。
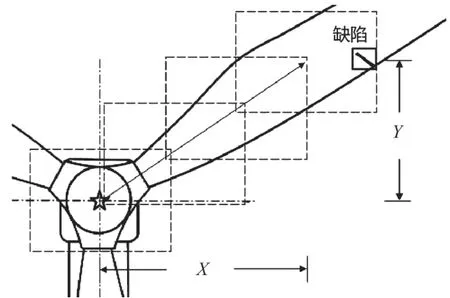
图2 利用缺陷所处图像的偏移量进行定位
为了实现更加准确的缺陷定位,需要考虑缺陷在图像中的位置。由于图像中心与缺陷中心在图像坐标系下存在偏移,按照图像坐标系与相机坐标系之间的转换关系,在已知相机焦距f和无人机与风机平面间距的情况下,依照透视投影关系得到该缺陷相对于图像中心的实际偏移量和。相机坐标系与图像坐标系间的转换关系如图3所示。

图3 相机坐标系与图像坐标系的关系示意图
其中:

得到缺陷相对于图像中心的实际偏移量后,需要在图像偏移量X和Y的基础上对缺陷偏移量x'和y'进行补偿。由于缺陷位置和叶片位置的不同,x'和y'并非完全等同于和,还包含了正负号。经过补偿后,缺陷相对于原点的实际位置将更加准确。缺陷细定位的示意图如图4所示。

图4 利用缺陷实际偏移量补偿进行细定位
4 结语
本文提出基于激光点云精确定位的风机叶片无人机自主巡检系统方案,基于高精度三维激光点云数据获取叶片的空间位置,自主规划飞行航线,满足叶片巡检拍摄要求,并能够准确提供检测缺陷定位,从而实现智能化检测,可为后续风力发电叶片无人机自主巡检提供新的发展方向。
