新模块化单桩缓冲系泊浮式集成结构系统研究
2021-10-27于悦凯宋育新周道成任年鑫
于悦凯,宋育新,周道成,任年鑫
(1. 大连理工大学 深海工程研究中心,辽宁 大连 116024; 2. 中国石油广西石化分公司,广西 钦州 535008; 3. 海南大学 土木建筑工程学院,海南 海口 570228; 4. 海南大学 南海海洋资源利用国家重点试验室,海南 海口 570228)
随着21世纪人口的急剧膨胀,土地资源变得愈发珍贵,且人口分布在沿海地区更为集中,因此对占地球总面积2/3以上的海洋进行开发与拓展已经成为了当今世界各国的研究重点。面对这一形势,国际海洋工程界掀起了研究超大型浮式结构(very large floating structure,简称VLFS)的热潮[1]。VLFS具有综合性、多用途的功能,且相比于传统的填海造陆工程,VLFS还具有可移动、受地震冲击小、对环境影响小等优点[2]。
VLFS有多种用于定位的系泊系统,如悬链线系泊、单锚腿系泊、张力腿系泊、系缆桩/缓冲系泊;结构形式主要有箱式和半潜式,其中箱式浮体结构简单,主要部署于靠近海岸的平静海域,半潜式浮体运动性能好,可部署于风浪较大的海域,但结构复杂建造成本高。定位系泊系统分为两类,一类是系泊缆,另一类是带着橡胶护舷系统的沉箱桩或桩式系缆柱[3]。VLFS因其庞大的尺寸,需要进行模块化设计,且与其他类型的海洋结构物相比,VLFS具有较高的柔性,因此其弹性变形效应需要考虑,水弹性分析成为其设计的关键[3]。Ertekin等[4]以16模块VLFS浮体为研究对象,建立了两种水弹性模型(①充分考虑了模块间水动力相互作用的柔性连接多刚体模块模型,②柔性连接多弹性模块的三维框架模型),对水弹性响应进行了分析,发现②模型需要更短的计算时间,但在流体动力最终设计阶段必须选用三维势流理论;Cho[5]对VLFS的系缆桩缓冲系泊系统进行设计,并发现在特定情况下,桩数越多,其所受的压力与变形越大,单桩系统有更好的运动响应; Tim等[6]对比了6款水动力软件关于浅水波浪引起船舶运动的计算结果,验证了AQWA对于浅水区域海上结构物动力响应计算的准确性;Li等[7]采用Ansys-AQWA对多模块海上平台进行频域分析,为VLFS结构网格动力研究提供了新的研究方法;Ren等[8-9]设计了一套基于超大型浮体的波浪能装置,旨在进行能源补给的同时减小波浪荷载,并针对不同连接器类型对水动力响应的影响进行了研究。Nguyen等[10-11]提出在矩形VLFS前缘安装模块化波浪能发电装置(WEC)来降低结构的水弹性响应并获取一定的波浪能,并参数化研究了箱体长度、发电装置阻尼系数、浮体模块间隙和入射波角对装置效果的影响。
目前该领域对浅水海域单桩缓冲系泊的研究较少,为配合南海重要岛礁陆域拓展及海洋资源开发,针对其浅水海域提出了一种新型模块化单桩缓冲系泊与波浪能装置集成的浮式结构系统,基于三维势流理论,综合考虑浮体模块与单桩结构的相对运动及相关波浪能装置的机械耦合机理,重点研究单模块浮体平台在新型缓冲系泊系统下的动力响应特征,进行单桩缓冲系泊系统参数的初步优化设计,并对极端海况下的动力响应进行安全校核,提出相应的优化自存策略。
1 理论基础及数值模型
1.1 新型模块化浮体结构系统概念简述
提出的一种新型模块化浮体结构系统,工作环境为有天然岛礁或人工庇护的20 m水深南海近岛礁海域。由于建造于浅水水深的结构物受潮汐影响较大,导致锚链难于适应相关设计和布置,而新型单桩缓冲系泊系统易于布置,且具有潮汐自适应的显著优势,并便于集成和拓展。在单桩缓冲系泊结构与浮体间设有波浪能发电装置(WEC),利用二者水平和垂向相对运动进行发电,在改善模块化浮体动力响应的同时,获得可观的发电量。
提出的模块化浮体概念设计如图1所示,该结构系统主要包括:1)模块化箱式浮体,浮体间隔2 m;2)单桩缓冲系泊基础,与模块间隔1.5 m,允许结构的垂向运动,限制浮体的水平运动;3)模块间连接装置,连接多模块并限制模块间的相对运动;4)水平护舷约束装置,其与单桩基础组成单桩水平缓冲系泊系统,允许浮体模块垂向运动,并利用浮体模块与单桩基础的水平相对运动进行波浪能发电;5)潮汐自适应垂向约束装置,其可以缓冲浮体的垂荡运动(波浪能装置阻尼效应),并利用浮体模块与单桩基础的垂向相对运动进行波浪能发电。

图1 新型单桩缓冲系泊模块化结构系统示意Fig. 1 Conceptual sketch of a novel modular floating structure with monopile dolphin moorings
鉴于此新型模块化结构系统为初步概念设计,其所涉及的模块单元、连接器及单桩缓冲系泊较多,全结构系统模拟分析的计算量巨大,同时文中主要是以此新型模块化结构系统的单桩缓冲系泊动力特征研究为主要目的,因此将主要对简化单模块浮体结构系统的动力响应特征进行深入研究,并获得单桩缓冲系泊系统的初步优化设计参数。简化单模块浮体结构系统如图2所示,该单模块浮体结构主要涉及参数如表1所示(主要参考万吨级船坞的建造能力[9])。

图2 简化单模块浮体结构系统示意Fig. 2 Conceptual sketch of a simplified single module floating structure system
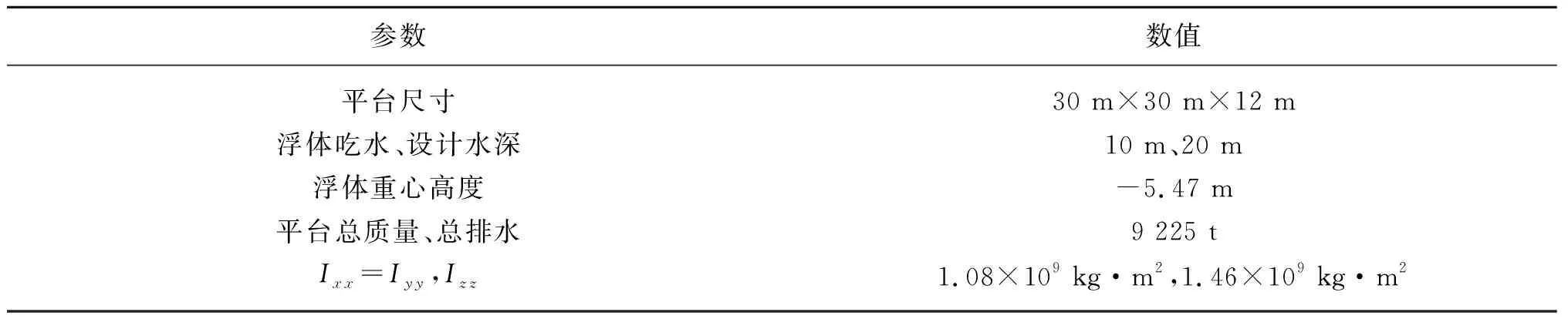
表1 单模块浮体结构主要设计参数Tab. 1 Main structure design parameters for the single-module floating
1.2 水动力载荷分析
基于Ansys-AQWA[12]软件平台,建立单模块浮体及新型单桩缓冲系泊系统的耦合时域分析数值模型,考虑浮体模块与单桩基础的动力耦合效应,重点模拟该结构系统在典型海况下的动力响应特征,并计算其波浪能发电功率。利用AWQA程序中的fender单元,模拟单模块浮体四周的水平波浪能发电约束装置及垂向波浪能约束装置,相关水动力模型如图3所示。

图3 AQWA水动力数值模型Fig. 3 AQWA hydrodynamic numerical model
此外,相关缓冲系泊系统的波浪能发电功率计算公式如式(1)所示:
P=F2/C
(1)
式中:P为发电功率;F为连接阻尼力;C为阻尼系数。
2 主要模拟结果分析
2.1 单桩基础水平护舷参数研究
鉴于拟选址海域为有天然岛礁或人工庇护的20 m深海域,因此初步选取代表性极端规则波海况条件为:H=4 m,T=10 s[9]。由于单桩水平护舷单元主要是限制浮体模块的水平运动,因此首先重点监测浮体的纵荡位移及加速度响应。不同水平护舷单元参数(阻尼/刚度)下模块化浮体结构系统的动力响应特征对比如图4所示。从图4(a)~(b)可以看出,缓冲系泊水平刚度和水平阻尼都会对模块化浮体结构系统的纵荡位移及水平加速度产生显著影响,特别是在水平阻尼较小时,水平刚度的影响更为显著。模块化浮体结构系统的纵荡位移及加速度随缓冲系泊水平刚度和水平阻尼的增加近似比例减小。因此,可以通过合理选择缓冲系泊水平刚度和水平阻尼参数值组合,达到有效控制模块化浮体结构系统水平动力响应的目标。并参考文献[13]水平加速舒适度的相关标准(即当aL≤0.98 m/s2时,舒适性较好),使此水平缓冲系泊系统可以满足相关舒适性的设计要求。此外,从图4(c)可以看出,水平波浪能装置平均发电功率随着缓冲系泊水平刚度和水平阻尼的增加而下降并趋于平缓,即水平刚度和水平阻尼相对较小时,水平波浪能装置的发电功率较大。进一步综合考虑缓冲系泊水平刚度和水平阻尼对模块化浮体结构系统的纵荡位移(图4(a))、加速度(图4(b))和平均发电功率的影响特征,提出该新型浮式结构系统水平缓冲系泊优化设计参数为:刚度6×106N/m、阻尼8×106N·s/m。这主要是基于充分发挥水平波浪能发电装置的发电效率,并确保浮式平台水平位移和加速度响应满足相关安全及舒适度的要求而确定的。

图4 不同水平护舷参数下的动力响应及平均发电功率Fig. 4 Dynamic response and average generating power with different horizontal fender parameters
2.2 垂向约束装置参数研究
选取代表性极端规则波海况(H=4 m,T=10 s)[9],进一步研究垂向约束装置的阻尼参数对浮体结构系统垂荡位移、加速度以及波浪能发电功率的影响特征,不同垂向约束装置阻尼下模块化浮体结构系统的动力响应特征对比如图5所示。
如图5(a)所示,随着垂向阻尼值的增加,浮体结构系统的垂荡以及垂向加速度都显著下降。综合考虑浮体的垂荡响应幅值,并参考文献[13]中垂向加速舒适度的相关标准 (即当aV≤0.49 m/s2时,舒适性较好),当装置阻尼值大于6×106N·s/m时,能够使此浮体结构系统基本满足良好的垂向加速度舒适度的要求。从图5(b)可以看出,当垂向阻尼从6×106N·s/m增加到1×107N·s/m时,对应的垂向波浪能装置的平均发电功率从1.76 MW下降到1.29 MW,即在垂向阻尼为6×106N·s/m时达到最大发电功率,因此建议浮体结构系统垂向阻尼的初步优化值为6×106N·s/m。

图5 不同垂向约束装置阻尼下的主要动力响应参数对比Fig. 5 Comparison of main dynamic responses under different vertical damping parameters
2.3 平台在典型运行海况下的数值模拟
基于上述单桩缓冲系泊初步优化设计参数(即:水平刚度6×106N/m,水平阻尼8×106N·s/m;垂向阻尼6×106N·s/m),选取一系列代表性规则波海况(H=2 m,T=4~16 s),进一步研究该浮体结构系统在不同波浪周期下的动力响应特征,主要数值模拟结果如图6所示。
从图6(a)中可以看出,浮体垂荡响应幅值随波浪周期的增加而逐渐增加,纵荡响应的幅值在波浪周期为11 s时出现了最大值。从图6(b)可以看出,浮体结构系统水平与垂向加速度的特征周期分别为8 s与11 s,且垂向加速度在波浪周期大于10 s的范围内对波浪周期相对不敏感。从图6(c)可以看出,波浪能发电装置平均发电功率随着波浪周期的增加先显著增加,在周期为11 s附近达到最大值,随后随着波浪周期的增加而逐渐减小。
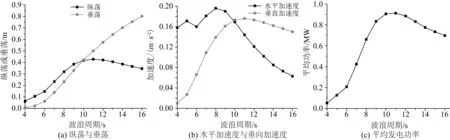
图6 平台典型运行海况的数值模拟Fig. 6 Simulation of platform under the operational sea case
2.4 极端海况安全校核
鉴于自然界中的波浪往往十分复杂,且具有显著的不规则随机性特征,进一步采用Jonswap谱描述极端不规则波海况(λ=3.3,有效波高Hs=4 m,谱峰周期Tp=10 s),基于初步确定的单桩缓冲系泊系统优化设计参数(水平刚度6×106N/m,水平阻尼为8×106N·s/m;垂向阻尼为6×106N·s/m),重点研究此极端海况下新型浮体结构系统的极值响应特征,主要数值模拟结果如表2所示。
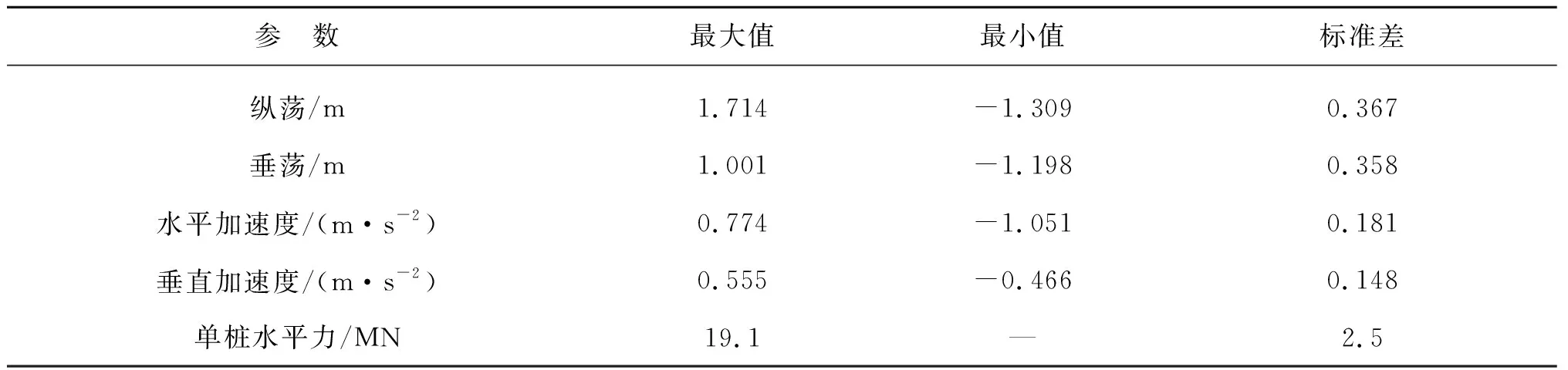
表2 极端海况下新型浮式结构系统动力响应特征统计信息Tab. 2 Statistic information of the new floating structure system in the extreme sea case
从表2中可以看到,极端不规则波海况下,纵荡和垂荡响应极值分别达到了1.714 m和1.198 m,水平加速度和垂向加速度极值也都超过了上述的舒适度范围(aL≤0.98 m/s2,aV≤0.49 m/s2),即可能会对浮体上工作人员及重要设施的安全造成不利影响。此外,此海况下水平波浪能装置和垂向波浪能装置总发电功率达到了可观的1.44 MW。为进一步改善新型结构系统在此极端海况下的动力响应,探索性提出极端海况下适当提高缓冲系泊系统液压阻尼参数的优化策略,即通过调整对应液压阻尼设备的阀门开口状态,适当增大一倍水平阻尼和垂向阻尼(即水平阻尼值为2×107N·s/m,垂向阻尼值为1.2×107N·s/m),进一步研究调整液压阻尼参数后浮体结构系统动力响应极值的改善情况,主要结果如表3所示。
从表3可以看出,增大阻尼值后的缓冲系泊系统显著改善了浮体结构的动力响应极值。相关纵荡和垂荡的响应极值分别降到了1.062 m和0.852 m,且水平加速度极值(0.398 m/s2)和垂向加速度极值(0.296 m/s2)也满足了舒适度的要求。此外,单桩基础的水平载荷极值显著下降了10%。这也验证了通过适当调整系泊液压阻尼来改善浮体结构系统动力响应特征的可行性,即当海况恶劣时,可通过适当调控缓冲系泊阻尼值来保证平台上人员及设施的安全。
3 结 语
针对南海近岛礁的浅水海域提出了一种基于新型单桩缓冲系泊具有波浪能发电及潮汐自适应特性的模块化浮体结构系统。针对简化单模块浮体结构系统,基于三维势流理论,综合考虑浮体模块与单桩缓冲结构的相对运动及相关波浪能装置的机械耦合机理,利用Ansys-AQWA软件重点研究了其在典型海况下的动力响应特征,得出的主要结论汇总如下:
1) 缓冲系泊系统的刚度和阻尼参数对新型结构系统的动力响应特征具有重要影响,结构系统的运动响应随系泊系统刚度和阻尼值的增加呈现比例似降低,基于满足人体舒适度要求和充分发挥波浪能装置发电效率的综合考量,初步获得了单桩缓冲系泊系统的优化设计参数,即水平刚度为6×106N/m,水平阻尼为8×106N·s/m;垂向阻尼为6×106N·s/m。该新型缓冲系泊系统可以获得可观的波浪能发电贡献。
2) 为提高极端海况下新型浮式平台结构系统的安全性和舒适性,可采用适当提高缓冲系泊系统液压阻尼参数的方法,即当阻尼参数增加一倍后,浮式平台结构系统的主要动力响应极值都得到了显著的降低,并满足了平台安全性及舒适性的要求。
此外,文中的主要研究成果还可以进一步拓展到多模块浮体结构系统的缓冲系泊系统研究,作为其优化设计的初步设计参数。