提高无人机中继系统数据吞吐率算法研究
2021-10-27卢艳玲张亚师杨道锟
陈 超,卢艳玲,张亚师,杨道锟,贾 硕
(西安现代控制技术研究所,西安 710065)
0 引言
利用低空高机动无人机(UAV)协助无线通信技术是一个全新的领域,已经引起了研究者们浓厚的研究兴趣以及广泛的关注[1]。首先,由于无人机具有高机动性[2],无人机协助式通信系统部署更加快捷灵活,适合特定场景或意外情况[3]。其次,相比于地面系统中的地对地通信链路,无人机对地通信链路更易是视距(LoS)链路,因此通信链路的信道容量更大[4]。无人机协助式通信系统的性能也可以通过附加设计进行提高,设计自由度较高[5],因此无人机协助式通信系统有望在未来的无线系统中发挥重要作用。
针对过远距离的两节点,无人机中继通信场景下如何提高系统数据吞吐率,提出了将网络编码概念引入无人机中继系统中,减少时隙浪费的方案,通过建立编码通信模型,仿真结果证明该算法比传统静态中继系统吞吐率更佳。深入分析仿真数据后,针对模型瑕疵,优化并提出混合编码无人机通信算法,将网络编码与数据直传相结合,根据实际信道条件,系统选择合适的中继方式,再经实验仿真,证明混合编码算法性能最佳。
1 网络编码
1.1 网络编码优势
假定单个链路单个时隙只能传输一个数据包。整个系统完成一次数据传输后,节点A,B收到彼此的数据包,即系统成功完成数据交换。
图1(a)中,系统完成节点数据交换任务需要4个时隙,图1(b)仅要3个时隙。节点U不只是中继数据,而是对数据进行异或编码(ma⊕mb),然后以广播的形式发送数据,节点A和B接收并对其进行解码以获取彼此的数据。

图1 网络数据传输模式
1.2 通信系统网络编码规则
网络编码采用异或编码方式。定义Ui是中继节点U广播的第i个数据包:Ui=Aj⊕Bk,Aj是节点U存储的来自节点A第j个数据包,Bk是来自节点B第k个数据包。j≠k,这是由于信道时变,各时隙发的数据包数是不同的。表1给出了广播数据包的规则。如当节点U广播Ui后,节点A接收Bk成功,节点B接收Aj失败,那么节点A需要接收来自节点B的第k+1个数据包,节点B再次接收来自节点A第j个数据包。因此Ui+1=Aj⊕Bk+1,其余情况类似。
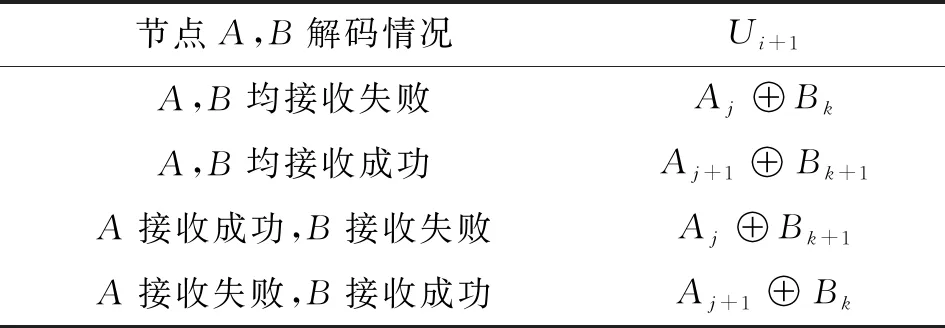
表1 节点U广播的第i+1个数据包
2 无人机飞行中继模型
无人机网络编码无线中继模型(UNCWR)中的无人机飞行轨迹是直线往返,采用基于时分双工的网络编码方式中继。系统模型如图2所示。

图2 无人机中继模型
图2中,节点A与距离L的节点B建立通信。当节点A,B之间的直接通信链路严重阻塞,需要一个中继节点U来协助节点A与节点B之间数据传输。与传统固定位置静态中继节点不同,假设移动中继节点U安装在无人机上,无人机在节点A,B上空往返飞行,协助节点之间无线通信,无人机飞行持续时间为TU。
为使模型具有通用性,模型采用三维笛卡尔坐标系,节点A坐标(0,0,0),节点B坐标(L,0,0)。假设无人机飞行速度恒定为v,飞行高度固定为H,飞行轨迹是以(L/2,0,H)为中心,半径为R的弧线。因此无人机飞行一圈的周期T=4R/v,即无人机的位置每经过T秒重复一次。在系统实际工作时,无人机总运行时间TU通常比无人机飞行周期T大得多,即TU>>T,近似地认为TU是T的整数倍[6]。由于无人机位置是周期性变化的,无人机飞行轨迹的优化设计可以在其他所有周期中重复利用[7],所以只需要考虑一个循环周期t∈[0,T]。

(1)
(2)
为了便于系统性解释,节点间通信均是视距(LoS)信道。此外,无人机高机动性引起的多普勒效应已被接收端补偿[8]。节点间的信道功率增益遵循自由空间路径损耗模型。因此,当节点U从B飞向A时,信道EAU(t),EUA(t),EBU(t)功率增益如式(3)所示。
(3)
其中,B0表示在参考距离为1 m时的接收端信号功率,其值取决于天线增益,载波频率等。
将无人机飞行周期T划分为n个时隙τ,即n=T/τ。设一包数据含N个比特,则第一时隙(3i,3i+1)τ节点A向节点U可发送PAU包数据,第二时隙(3i+1,3i+2)τ节点B向节点U可发送PBU数据包,第三时隙(3i+2,3i+3)τ节点U向节点A,B广播PUA包数据,如式(4)所示。其中P为发射信号功率,B为信道带宽,σ2为噪声密度。
(4)
3 UNCWR算法仿真结果与讨论
3.1 UNCWR算法说明
UNCWR算法流程为:
1)A,B距离L;
2)设置无人机轨迹半径R,飞行速度v;
3)计算无人机飞行周期T,划分时隙;
4)计算各时隙节点A,B,U收发包数;
5)计算无人机飞行一圈,节点A收到总包数;
6)计算节点A数据吞吐率Tp;
7)重复2)~6),计算最佳无人机飞行半径R,使节点A吞吐率Tp最大。
3.2 UNCWR算法仿真
实际工程中,发射频率P=37 dBm,通信距离10 km。根据参考文献[9]模型参数,等比例尺减小,设P=10 dBm,A,B节点距离L=800 m。从图3中可以看出,无人机静态三时隙中继(static3)系统中节点A的吞吐率优于无人机静态四时隙中继(static4)系统。这是因为static3节省了通信时隙。从图中可以看出static3和static4系统的吞吐率不随无人机飞行半径R而变化。这是因为静态中继节点的位置是固定的,节点U距离节点A,B的长度是定值L/2。因此信道非时变,系统吞吐率是定值。
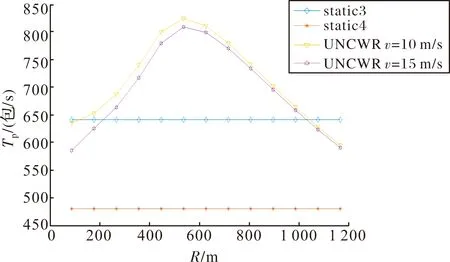
图3 不同中继系统的节点A吞吐率与飞行半径关系
UNCWR算法中节点A吞吐率是无人机飞行半径R的凹函数。相较于静态中继系统中信道非时变,由于无人机动态飞行,节点U与两节点的距离会变化。当节点U靠近节点A时,信道质量增强,节点U成功发送数据包数上限提高,虽然节点B发送给节点U的数据减少,但此时无人机内存中有上一次第二时隙存储数据包PBU的余量,所以节点A成功接收的数据会增多。因此无人机半径R影响着无人机网络编码中继系统吞吐率。UNCWR相比static4,吞吐率约提高50%。随着R的不断增大,节点U与两节点的长距离模式时间增大,信道质量较差,吞吐率开始降低。因此存在无人机最佳飞行半径,使无人机网络编码中继系统吞吐率达到最大值。
通过对仿真数据的分析,当无人机处于轨迹边缘时的时隙,和无人机在轨迹中间相比,收发的数据包很少,差距较大。边缘处由于与某一节点距离远,几乎接收不到节点信息,如果依然采用UNCWR会浪费时隙并降低系统吞吐率。为了解决该系统缺陷,引入无人机混合编码无线中继(UHCWR)。当节点U和某个节点之间的通信质量差时,将不会执行三时隙网络编码传输。节点U仅以两时隙直传(TTSC)与临近节点通信。
4 混合编码中继算法
4.1 混合编码模型
如图4所示,阶段1中,节点U与节点A之间距离太远,接收端信号信噪比小,信道容量较低,系统会浪费2/3的时隙。所以选择两时隙传输(仅节点U,B交换数据)。当无人机飞行至图中阶段2、3处,由于节点A和U距离缩小,节点接收信号信噪比满足通信标准,执行网络编码中继方式。但当无人机处于阶段4时,由于本系统模型中心对称,节点U与节点B距离过远,也将不能正常通信,系统将再次选择两时隙直传,此时是节点U和节点A交换数据。由于对称性,阶段5、6、7和8与以上阶段情况相同,整个通信系统由两时隙直传和三时隙网络编码中继组成,故称为混合编码中继(UHCWR)。系统判断两时隙直传和三时隙网络编码方式的标准是节点U接收节点A,B中某一个节点的数据信号信噪比是否小于门限值St。当信号信噪比大于门限值St时,节点之间可以正常通信。即无人机从起点飞向节点A,B的过程中,存在t0∈(0,R/v),使SAU(t0)=St。SAU(t)表示节点U接收节点A数据的信噪比。

图4 混合编码中继模型
(5)
4.2 理论分析
分析模型可以算出各阶段持续时间,如表2所示。

表2 各阶段起始时间
(6)
(7)
当ΔTp>0时,即随R增大,Tp也增大;当ΔTp<0时,即随R增大,Tp反之减小。当ΔTp>0时,得出式(8):
(8)
左式表示Δ距离下的数据吞吐率,右式是2倍的Tp。即R增大,会导致阶段1、8的时间增大,在这两阶段中A接收不到数据,系统总体浪费时隙。因此Δ距离内的节点数据吞吐率必须大于原系统的两倍,系统吞吐率才可以提高。
4.3 仿真结果与讨论
如图5所示,L=500 m,各系统节点吞吐率随无人机飞行半径的变化。当UHCWR和UNCWR在R=90 m和180 m时,节点A吞吐率相同。这是因为无人机飞行半径较小,无人机飞行全程节点U均能与节点A,B正常通信。因此UHCWR采用三时隙网络编码模式进行中继任务。当R增大时,UHCWR开始引入两时隙直传模式。仿真表明相比UNCWR,吞吐率提高23%。相比static3,吞吐率提高60%。R持续增大,UHCWR和UNCWR的吞吐率降低。

图5 不同系统节点A吞吐率与飞行半径关系
图6描述了各系统节点吞吐率随节点距离L的变化趋势。UHCWR和UNCWR部分曲线拟合。当节点距离过大,UHCWR体现出了优势。UHCWR下降较缓,抗性最好。
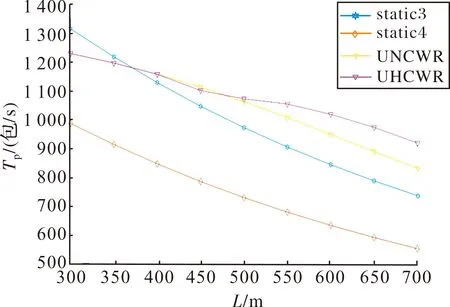
图6 不同系统节点A吞吐率与节点距离关系
图7描绘了Tp-R曲线的峰值会随着R增加而降低,并且右移。即吞吐率会随着R增大而减小,原因是U与A或B之间的距离增加直接导致接收端信号信噪比的降低。同时L增大,R的最优值也会增大。

图7 UHCWR节点A吞吐率与飞行半径关系
5 结论
基于无人机空中基站的混合编码中继模型提高了系统中继通信性能,并且提高了系统保密性。经过理论分析与仿真对比,混合编码中继吞吐率提高了60%。混合编码中继模型明显地提高了通信效率,更有效地利用了信道资源。
