基于ESC的某无人驾驶小型客车线控制动系统设计
2021-10-27尤永瀚马万成张晶鑫
尤永瀚,张 丽,马万成,张晶鑫
(北汽福田汽车股份有限公司,北京 102200)
随着汽车电子技术的不断发展和成熟,线控制动系统应运而生。线控制动系统由于集成度高、易于布置,在能够满足ESC功能的同时,还可以实现 ACC、AEB等功能,从而满足智能驾驶功能开发的需要[1-5]。
汽车ESC通过控制轮胎纵向力和横向力的大小和方向,保证汽车在制动、驱动、急转向甚至其他极限工况下稳定行驶,增强汽车的安全性。汽车ESC通过实现对各个车轮轮缸压力的精确控制,为汽车线控制动提供了一定基础[6-8]。
本文介绍的基于ESC的线控制动系统是目前实现汽车制动智能控制最经济成熟的方法之一,已在公司生产的为2022年冬奥会服务的4 m段无人驾驶小型客车中推广应用。
1 线控制动系统选型及架构
1.1 线控制动系统选型
该无人驾驶小型客车需在特定运行区域内实现L4级无人驾驶功能,如可自主规划路径和选择停靠点等,要求其线控制动响应延时≤0.5 s。
由于该车ESC是基于传统液压制动系统,具有成本低、延时短、失效冗余完备、四轮制动实时独立控制等优点,可用于精确执行自动驾驶控制器发出的制动指令,实现整车减速度或制动压力的主动控制[7-9]。因此,该无人驾驶小型客车采用基于ESC的线控制动系统。
1.2 线控制动系统架构
该车基于ESC的线控制动系统架构如图1所示,包括储油杯1、电子液压控制单元(HCU)2、压力传感器3、压力采集板卡4、组合传感器5、制动卡钳6、制动盘7、制动硬管8、制动软管9、耐油胶管10、线束11、CAN信号12等。其中电子液压控制单元(HCU)2中包含了电机、控制器、电磁阀。其主要功能如下:
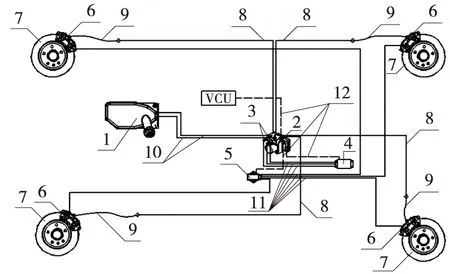
图1 无人驾驶小型客车线控制动系统架构
1) 响应车辆顶层控制器(即整车VCU)发送的目标减速度要求:减速度范围0~6.0 m/s2,减速度响应时间≤0.5 s,减速度建压时间≤0.6 s。其中响应时间是指整车VCU发出制动请求至车辆速度开始断崖式减小的时间;建压时间是指整车VCU发出制动请求至车辆达到目标减速度的时间。
2) 在正常水泥路面或沥青路面,要求线控制动精度为max(0.2 m/s2,10%),即在0.2 m/s2和(10%×目标减速度)两个值中取最大值。
1.3 线控制动系统的控制算法架构
1.3.1 制动压力模型
基于ESC线控制动系统的控制算法的基础是制动压力模型。
1) 制动压力模型设计。该制动压力模型设计如下:首先基于HCU特性搭建其HCU中的电机及各种控制器的硬件模型,然后将根据该无人驾驶小型客车的整车参数计算出的不同目标减速度与所需制动压力的关系曲线导入到上述制动压力硬件模型中,最后通过该模型中的电机、控制器的开度配合设计实现不同目标减速度所需的制动压力。
2) 制动压力模型控制。当HCU收到制动信号时,所设计的制动压力模型进行前馈控制,并根据轮缸压力信号进行反馈控制,HCU选择合适的控制指令,产生目标压力对车辆进行制动,使车辆达到目标减速度,同时保证制动减速度的一致性、稳定性和平顺性。
1.3.2 控制算法架构
基于ESC线控制动系统的控制算法主要分为主动制动控制(相关状态量计算和进入退出条件判断)模块、上层控制器(目标减速度控制器)模块和下层控制器(主动制动压力控制器)模块,其架构如图2所示。其中,上层目标减速度控制器、下层主动制动压力控制器的控制逻辑如图3所示。
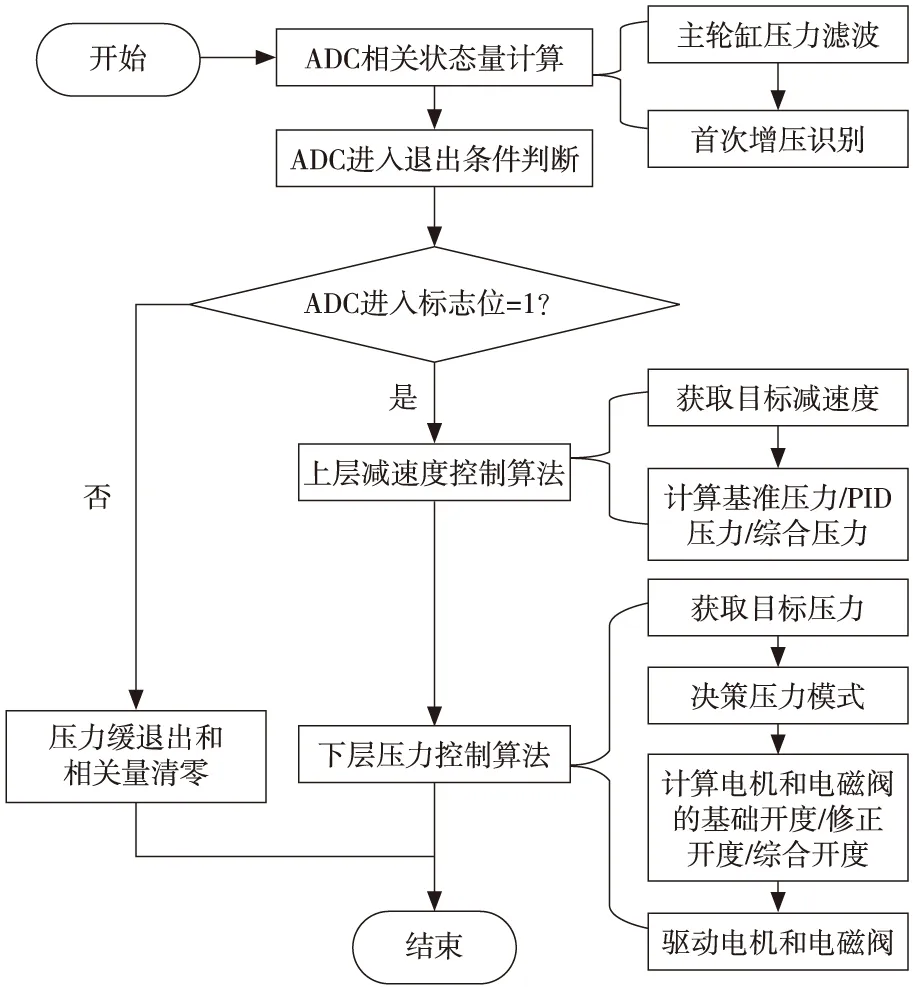
图2 控制算法架构
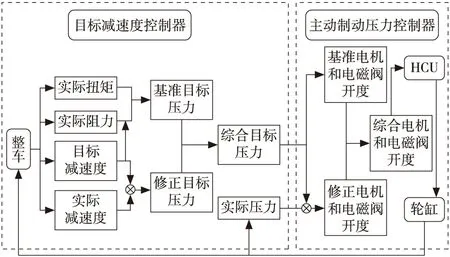
图3 基于ESC的线控制动控制逻辑
上层的目标减速度控制器的作用是将目标减速度转化为目标压力;下层的主动制动压力控制器的作用是解算合适的电机和电磁阀指令,来实现上层控制器请求的目标压力。
上层的目标减速度控制器的控制逻辑:根据车辆纵向动力学模型,计算实现目标减速度所需的基准目标压力,作为控制过程中的前馈环节;根据目标减速度和实际减速度的偏差,对目标制动压力进行修正,得到修正制动压力,作为控制过程中的反馈环节;最后,根据基准制动压力和修正制动压力,得到综合目标压力。
下层的主动制动压力控制器的控制逻辑:首先,根据正向压力模型,计算各个电磁阀的基础开度和电机的基础开度;然后,根据压力偏差反馈,计算各个电磁阀的修正开度和电机的修正开度;最后,将基础开度与修正开度叠加,得到电磁阀与电机的综合开度。
2 线控制动系统验证及结果分析
将上述线控制动系统零部件进行整车装配,针对上述理论设计进行验证,以完成整车线控制动系统的最终设计。
针对前述无人驾驶小型客车,在平坦的高附着铺装路面,开展线控制动系统的动态验证,环境温度在30 ℃左右。
本次验证测试项目为减速度阶梯变化。减速度阶梯变化测试反映了典型的增压-保压-减压过程,模拟了车辆典型的制动减速工况。制动时初始速度为15 km/h左右,目标减速度为1.0~6.0 m/s2。每种目标减速度下,分别记录减速度响应时间、减速度建压时间、线控制动精度,验证试验的技术要求和试验结果见表1。
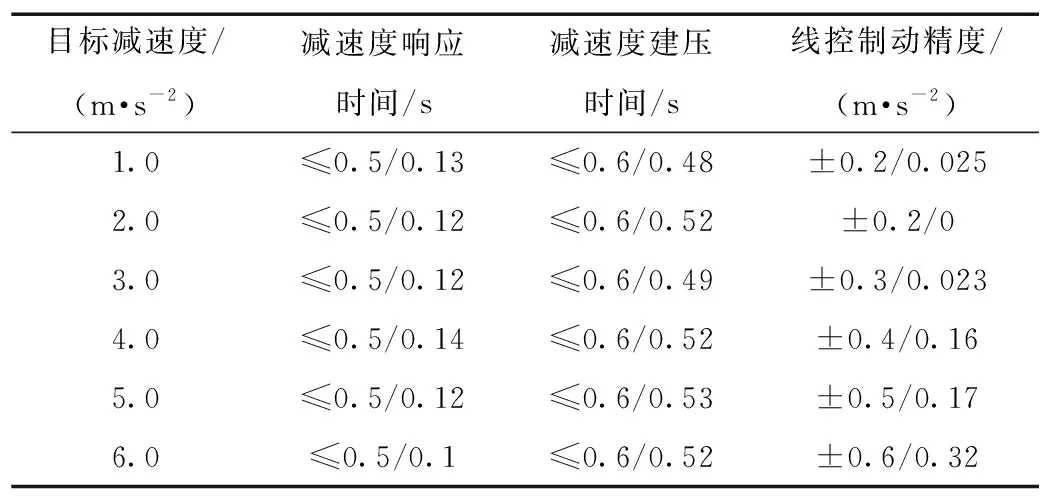
表1 技术要求/试验结果
通过1.2中的主要功能以及表1中技术要求和试验结果的对比表明,在不同目标减速度下,该系统都能及时准确地跟随目标减速度,两项时间指标也满足技术要求,达到预期目标。
3 结束语
本文阐述了某4 m无人驾驶小型客车线控制动系统的设计开发过程,主要介绍了基于ESC的线控制动系统的架构、主要功能、技术指标和控制算法架构等,并进行了验证试验,结果表明:基于ESC的线控制动系统完全满足制动响应时间≤0.5 s的要求和各减速度梯度下建压时间的要求。
