实现环带区域均匀覆盖的洗碗机喷臂技术研究
2021-10-26黎铭峰王豪杰徐术荣黄书庆
黎铭峰, 王豪杰, 徐术荣, 黄书庆
(华帝股份有限公司, 广东 中山 528415)
0 引言
近年来, 洗碗机在健康需求的助力下保持着良好的增长态势。 从用户需求出发,洗碗机技术研究聚集在“洗净提升”“用时缩短”“健康科技”“智能化操控” 等方面[1],并不断取得新的进展。
洗净性能是洗碗机的两大指标之一, 主要取决于洗碗机水流系统的洗涤能力和效果。 洗碗机的洗涤能力包括水流的机械冲洗作用、 洗涤剂的化学作用和热水的溶解以及热冲击作用[2],其中机械冲洗作用占据主要位置。一直以来,喷淋覆盖不足、洗涤不均匀、洗涤用时长等始终是洗碗机行业中普遍面临的问题。
1 喷臂技术的现状
1.1 “一”字型喷臂系统
“一”字型喷臂系统是最基本的喷臂方式,喷臂绕中心轴做水平转动,各个喷射孔形成同心圆轨迹,如图1 所示。 以直径φ450mm 圆形区域为例,喷臂两侧喷臂翼上从中心向外开设10 个喷射孔, 最大圆直径即为450mm,对应的喷射孔到旋转中心的距离L=225mm。

图1 洗碗机常见的同心圆覆盖正方形洗涤区域的示意图
同心圆轨迹看起来已形成较好覆盖, 喷射水柱线径设为2.7mm,结合发散、溅洒、反射等效应, 一个喷射孔能够对轨迹线附近区域进行清洗。但是,同心圆轨迹是固定的, 相邻轨迹间隔为18.75mm, 因此覆盖区内不同位置受到的洗涤强度是不一样的。如图2 所示,轨迹以及附近位置的洗涤效率最高, 两条轨迹的中间位置收到的直接喷射作用最少, 因此只能通过充足的时间去达到所需的洗净效果,降低洗涤效率。

图2 固定同心圆轨迹覆盖的洗涤强度不均匀
1.2 卫星喷臂系统
洗碗机中,最早设计的卫星喷臂是自由旋转的,后来引入了行星齿轮系机构,使得卫星喷臂的公转与自转形成明确的转速比关系,从而实现对卫星喷臂上喷射孔的运行轨迹的精确控制,据此首先开发了椭圆线喷臂[3],补充覆盖正方形区域的四角位置;之后又有了肾形线喷臂[4],能够更好地覆盖长方形区域。
目前,卫星喷臂技术都是针对圆形覆盖区与洗碗机内部的正方形或长方形洗涤区的不匹配问题,控制卫星喷臂的运动轨迹使其能够在某些特定位置超出原来的圆形区,从而扩大喷臂的覆盖面积。 而对于圆形覆盖区内部,上述喷臂未能起到很好的改善作用。只有改善圆内各个位置的洗涤均匀性,才能从根本上提升洗涤有效性和洗涤效率。
2 环带状覆盖的研究
2.1 喷射孔的运动轨迹

式中,x—横坐标;y—纵坐标;α—卫星喷臂公转角度,也是主喷臂转过的角度;D—卫星喷臂自转中心O'和公转中心O 的距离,即偏心距,有D=R1+R2;X 为卫星喷臂上喷射孔到卫星喷臂自转中心O' 的距离,最靠外的喷射孔有X=(L-D)。


表1 不同齿数比k 形成的卫星喷臂喷射孔的运动轨迹线的特点
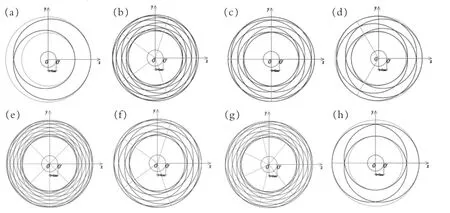
图3 不同齿数比k 形成的卫星喷臂喷射孔的运动轨迹(各图中,D=42mm,X=L-D=183mm)
2.2 “十”字分布喷射孔的多轨迹叠加
四个喷射孔分别设在相互垂直的四个喷臂翼上,到自转中心O' 的距离相等,称为“十”字分布。 四个喷射孔的运动轨迹叠加的图形如图4 所示, 四个轨迹线形状相同,都包含在半径为L 与(L-2D)之间的环带区域之内,不同轨迹线之间旋转错开一些角度, 四个轨迹线相互交织在环带区域内形成了更为密集的网格覆盖。
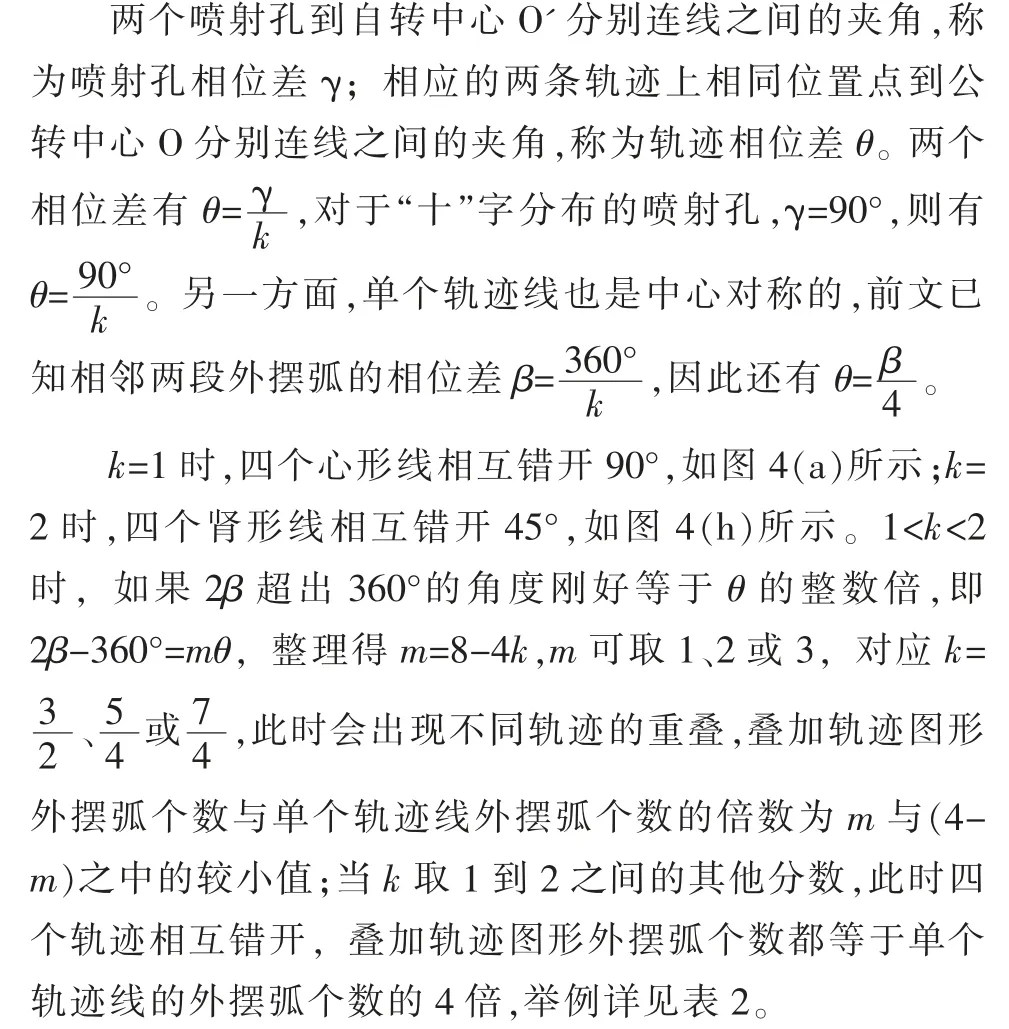

表2 不同齿数比k 形成的“十”字分布喷射孔的轨迹叠加图形的特点

图4 不同齿数比k 形成的“十”字分布四个喷射孔的轨迹叠加图(各图中,D=42mm,X=L-D=183mm,四个轨迹线依次标记为黑色、灰色、深灰色和浅灰色,有重叠时靠后的轨迹线不显示。 )


2.3 单环覆盖与双环覆盖

图5 k= ,D=42mm 的轨迹叠加图形的轨迹间隔

图6 k=,D=42mm 的双环覆盖的示意图
3 喷臂系统的动力特性
3.1 转动力矩的计算
简化假设从原喷臂上改到卫星喷臂上的四个喷射孔的形状、 大小和倾斜角度全部相同, 因此每个喷射孔产生的用于驱动喷臂旋转的反冲力F 是一样的。

比较可知, 引入卫星喷臂和行星齿轮系机构后, 喷臂系统从喷水反冲作用获得的总动力矩有所增大,但不会超过2 倍。 同时, 卫星喷臂与主喷臂之间增加了旋转连接,该处会增加系统的阻力矩。 综合考虑下,两个喷臂系统的合力矩的作用是基本相等的。
3.2 转动惯量与系统角动量的计算[6]
简单地分析,喷臂是等截面的,即沿喷臂翼方向的质量线密度保持均匀相等, 忽略喷射孔开设和齿轮质量对质量线密度的影响。

有研究表明, 喷臂在合适的旋转速度范围内才能产生最优的洗涤效果[7],因此这里的两个喷臂系统的公转角速度ω 应该相当,加上转动力矩基本相等,可得出原喷臂系统和单环覆盖喷臂系统的角动量基本相等,即

令L=225mm,D=42mm,取1≤k≤2,代入式(1)~(3)计算得0.146≤μ/λ≤0.214, 因此卫星喷臂的质量线密度要大幅减小。 对此,卫星喷臂设计时一方面由于每支喷臂翼上只有一两个喷射孔, 可以将喷臂翼做成细长的不锈钢管,如图7 所示,减小壳体以及流道的截面积以降低喷臂体线密度;另一方面,如果兼顾外观造型,可采用塑料材质,例如PP 塑料与不锈钢的密度比约为0.9/7.8=0.115,同时控制流道以减少水的重量, 这样也能达到卫星喷臂体的线密度要求。
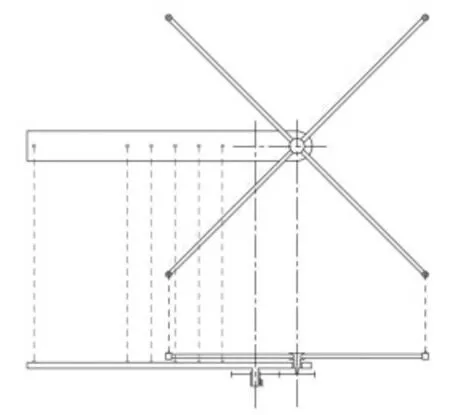
图7 单环覆盖喷臂系统以及齿轮机构图
3.3 双环覆盖喷臂系统
对于双环覆盖喷臂系统,卫星喷臂的每支喷臂翼在(L-D)和(L-3D)两个位置开设喷射孔,转动动力矩M2'=M0'+4F[(L-D)+(L-3D)]k=M0'+8F(L-2D)k,与原喷臂 的 转 动 动 力 矩M1'=M0'+8F(L-2D)比较可知,双环覆盖喷臂系统有更多喷射孔从主喷臂改到卫星喷臂上,从而更多的反冲作用通过行星齿轮系机构得以放大,动力矩有更大程度的提升, 同时阻力矩没有其他方面的显著增加,所以喷臂系统能够获得更充足的合力矩作用。
另外,对于转动惯量与系统角动量,如图8 所示,双环覆盖喷臂系统和单环覆盖喷臂系统的零部件组成和组装结构是基本一致的,因此二者的转动惯量与系统角动量可视为相同,即L2'=L2。因此,双环覆盖喷臂系统具有更好的动力特性。
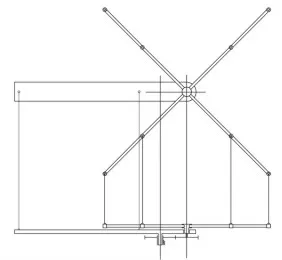
图8 双环覆盖喷臂系统以及齿轮机构图
4 结论
本文旨在通过喷臂技术的创新去提升洗涤覆盖均匀性,进而提升洗碗机洗净能力。与以往研究致力于扩大覆盖面积的思路不同, 本文分析了固定同心圆覆盖均匀性的不足,提出了通过行星齿轮系机构控制偏心卫星喷臂,使喷射孔形成多弧外摆线的运动轨迹, 进而形成高密度网格覆盖的环带区域,达到均匀覆盖效果。
本文详细研究了齿数比在1 到2 范围之内时外摆线的形状特点和相位特点, 尤其是提出了四个均布喷射孔的轨迹叠加的环带区域,通过合适的齿数比、偏心距、喷射孔位置等参数的设定, 可实现轨迹间隔小于12mm,从而消除了覆盖区内部不均匀的情况。另一方面,还比较了单环覆盖和双环覆盖的效果,覆盖率可达到93%以上。
此外,本文还分析了环带覆盖喷臂系统的动力特性,计算并对比了不同喷臂系统的转动力矩、 转动惯量和总角动量,得出了环带覆盖喷臂系统具备可行性的结论,并且双环覆盖喷臂系统的驱动力会更充足, 同时给出了卫星喷臂设计时在结构和材料方面的具体建议。
