轮式机器人底盘结构设计与计算
2021-10-23胡艳凯
付 慧,胡艳凯
(1.西安交通工程学院电气工程学院,陕西 西安710300;2.陕西国防工业职业技术学院智能制造学院,陕西 西安710300)
随着《中国制造2025》行动纲领的实施和引导,国内机器人行业得到了迅速发展[1-2]。机器人的功能越来越多,智能化程度也大大提升。移动式机器人方面例如探险机器人、扫地机器人、巡航机器人,已广泛应用到野外、家庭及企业等领域,能够帮助或者辅助人们完成某些特定的任务或工作[3-7]。移动式机器人的移动功能主要体现在机器人底盘或仿人机器人的下肢,对整个机器人产品的稳定性及功能性的实现至关重要[8-9]。
本文设计了一种可移动机器人的底盘结构,底盘中间车轮与前后车轮分别呈三角形分布,不但可以提高机器人整体的稳定性,而且可以进行前进、后退及转向。此外,本文设计的机器人底盘具有一定的开放性,可以搭载不同的机械结构实现不同的功能,例如搭载机器人上肢,可作为仿人机器人应用在商场、医院等场所,为人们提供导航、信息查询等服务;也可以搭载机械手臂,作为可移动式的机械手臂,应用在车间、物流公司等,帮助人们搬运货物。
1 轮式机器人底盘结构设计
本文设计的新型机器人底盘结构主要包括底盘架、前后车轮架、前后车轮、位于底盘中间两侧的主动轮、安装架、转动轴、齿轮盘、电机、前叉、油管体、固定座。底盘架底端的前后两侧分别固定有车轮架,且底盘架上表面开设的凹槽中固定有安装架,底盘架底端的中间位置固定有安装座;安装座的内部固定有轴承,且轴承的内环与转动轴固定连接;转动轴的中间位置固定有齿轮盘,且齿轮盘与电机输出轴上安装的齿轮通过轮齿啮合转动连接;转动轴两侧分别安装两个主动轮,且主动轮的车轮直径大于底盘前后两个小车轮的直径;主动轮在移动过程中将动力传给其他车轮,提高装置稳定性的同时提高装置的移动速度。
另外,底盘前后两个车轮架的下端分别安装两个小车轮,且车轮架由安装架、前叉、油管体、固定座组成;安装架由减震弹簧和框架组成,且设置有两个安装架,可提升装置的减震性能。移动机器人底盘结构设计见图1、图2、第98页图3。
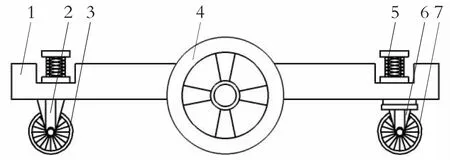
图1 机器人底盘整体结构
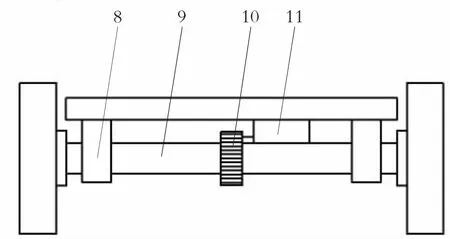
图2 机器人底盘主动轮结构
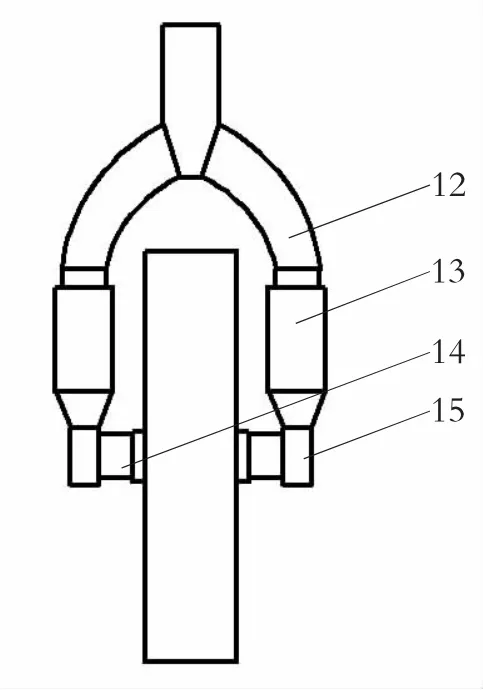
图3 底盘小车轮结构
工作原理:工作时可将需要安装的部件安装在底盘架1上端的安装架5上,在底盘架1的上端和下端分别设置有具有减震效果的安装架5和车轮架B6,车轮架B6的前叉12在油管体13内上下移动,使得底盘架1的上端和下端均具有一定的减震性能,可提升装置整体的减震性能,在底盘架1的前后分别设置车轮B7和车轮A3,并且在底盘架1的两侧设置主动轮4,使得底盘架1中间部位与前端和后端均可构成三角形,极大地提高了底盘架1的稳定性能。工作时,仅控制电机的转速和转向,可以实现机器人的前进和后退动作。
2 轮式机器人底盘主要参数
为了使机器人底盘各核心零部件发挥最大功能,使机器人具有一定的使用性能,下述为底盘结构参数化设计。
整体底盘总长为80 cm,总宽为60 cm,两个主动轮直径为25 cm,能够承受最大载重量为150 kg;两个小车轮直径为15 cm,能够承受最大载重量为77 kg,整个底盘及辅助支撑架均选用铝合金材质,最大限度地满足机械设计的轻量化原则,且具有一定的负载能力。
根据小车的自身重量及负载,最终确定驱动电机采用两相混合式步进电机[10-11],额定扭矩为36 N·m,具有噪音低、运转平稳、传动效率高、抖动小的特点。另外,连接电机输出轴的齿轮盘主要参数为:模数m=1;齿数z=20;压力角α=20°;减速比为3。具体计算公式为

式中:T1为电机的额定扭矩,36 N·m;i为减速比,3;φ为传动效率,0.95;n为安全系数,1.2。经过计算得到机器人底盘的最大扭矩T'=85.5 N·m。
假设小车两主动轮重心位于底板两侧边缘,小车两从动轮重心位于底板前后侧边缘,具体计算公式为

式中:F1为主动车轮承重;h1为主动车轮重心距机器人底盘重心距离,0.3 m;F2为从动小车轮承重;h2为从动车轮重心距机器人底盘重心距离,0.4 m。
经过数据计算得到主动轮承重、从动轮承重与机器人车轮承重扭矩的关系为

由上文可知机器人主动轮和从动轮的最大承受力分别为150 kg和77 kg,通过计算可以得到机器人小车车轮承重扭矩为T''=107.8 N·m。
机器人小车最大理论扭矩T'小于机器人小车车轮承重扭矩T'',即T' 上述分析说明本文设计的机器人移动底盘能够承受一定的负载,由于结构设计符合对称原则,底板承受载荷分布比较均匀,因此稳定性较高。上述计算得到的最大承重扭矩为机器人设备使用于托运、搬运等情况,例如承运货物、分拣快递等场合,如果需要搭载机械手臂或者仿人机器人上半身,则还需要进行机器人负载的校核。 本文对机器人底盘进行了结构设计和主要核心部件的选型计算,为下一步对机器人进行运动学和动力学研究和仿真研究提供了参考。 本文设计的一种轮式机器人底盘结构,具有两个主动轮和两个从动小车轮,且具有三角形分布特点,提高了整个底盘在运动过程中的稳定性,结构设计比较简单且有一定的创新。控制系统平台仅需要控制电机的转速和转向,整体设计成本低,维修方便,具有很强的稳定性。在底盘架前后的从动小车轮安装设置有具有减震效果的安装架和车轮架,使得底盘架的上端和下端均具有一定的减震性能,在底盘负载移动过程中,能够在一定范围内补偿由于负载分布不均造成的小车抖动或失衡现象。 机器人结构符合对称设计原则,承受载荷分布较均匀,能够提高机器人底盘在工作过程中的稳定性,降低故障率,机器人的控制系统设计简单明了,方便维修。此外,本文设计的轮式机械底盘还具有一定的开放性,可以直接在机场、火车站、工厂等场所帮助人们搬运行李和货物,也可以搭载或配合不同的机械附件,应用在不同的场合和工作环境,实现不同的功能。3 结束语