基于电磁与红外传感器的智能车导向与避障
2021-10-22龙银银许秩茂
龙银银 许秩茂



摘要:本设计主要介绍基于电磁与红外传感器的智能车导向与避障的制作和实现。其主要由主控芯片、电源、人机交互、摄像头、电磁传感器、红外测距、速度检测、电机驱动、舵机驱动九个模块组成。本系统基于开车产生的碰撞事件,采用电磁传感器识别路面的电磁信号与红外传感器信号,自動控制小车刹车、前进、转向与避障,从而实现启动、加速、转向等自动化处理,为交通事故问题提供解决方案。设计中分析无关电磁对实验产生的影响,采取高灵敏度的电磁传感器以及多种频率的电磁信号,来提高小车运行的可靠性。采用PID算法控制小车运行和转向,对该算法控制效果以及优缺点进行分析,使小车能够在任意放置障碍物的跑道上自适应的变速以及转向。
关键词:智能车;红外传感器;电磁传感器;循迹导向;避障
引言
近年来智能控制技术被广泛运用于各种行业,汽车行业也逐步向数据化、网络化和数据化方向发展。智能车作为一种新型产品其便捷性优势明显,有望成为年轻一代的首选产品。本文中采用智能车新C车模为研究平台,以32位微处理器LPC54606为主控,全文将从智能车总体设计、机械结构、硬件电路、控制算法等方面详细介绍整体设计思路。
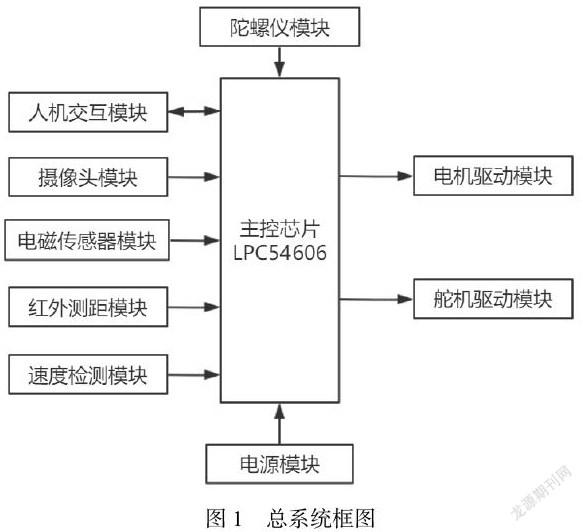
一、系统总体设计
智能循迹小车的技术主要是指一种利用传感器、单片机、电动风扇的驱动及自动控制技术,预设的小车模式,实现不同时间无需人工管理的自动跟踪和导航。
本设计在Keil5中进行,核心控制器为LPC54606,它是一个32位的微控制器。首先利用灰度摄像头MT9V032采集赛道信息并以图像信号的方式传入到微控制器中以此来获得主要的路面相关信息;检测车速这部分我们使用了两个编码器来完成,车
模的运行速度和路程由单片机脉冲计数获得,并由此构成速度闭环控制;在转向舵机与电机差速的配合下实现车模的控制和转向,电机的输出功率则是由PWM控制驱动电路来进行调整;利用上位机与OLED屏幕在调试中实现数据监测,获得更好的调试效果。
二、实验原理
(一)红外探测法
表面的颜色不同的物体,其对红外线的反射能力也不同。行驶过程中,小车会周期性的发射红外光射向地面(这个周期很短,以此来达到更为精确地识别)。当红外光遇到由白色地面(这里我们用白色纸板代替)时,便会发生漫反射,于是安装在汽车上的接收管就能接收到反射光;反之如果遇到黑线(黑纸代替),红外光会被吸收,小车上的接收管也就无法接收到红外光。是否能接收到反射的红外光便作为单片机判断的依据,并以此来确定黑线的位置以及汽车的行走路线。[1]
(二)红外避障原理
红外避障我们采用了两个红外传感器,它们被分别安装在主板的两侧。小车正常行驶时,如果两侧传感器的返回值是“1”(即高电平),则表明前方没有障碍物。如果从一侧传感器的返回值为“0”(即低电平),则表明该侧传感器前面有障碍物,此时单片机会根据我们写的程序来控制小车的运动,避开前方障碍物之后继续行驶。重复上述操作,实现避障功能。
三、硬件
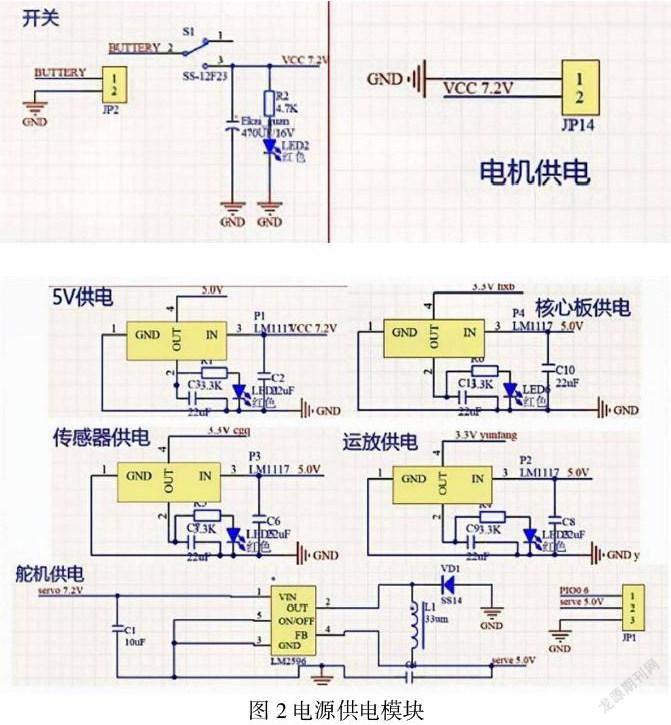
(一)电源供电模块
电源供电模块是智能车系统的能源动力供给来源,稳定的供电系统是小车成功运行的必要条件。镍镉电池输出7.2V电压,直接供电给电机驱动板和舵机稳压块,输入给驱动板中的BTN芯片与LM1117稳压芯片得到PWM输出波,输入给舵机供电稳压LM2596芯片得到舵机供电5V电压。
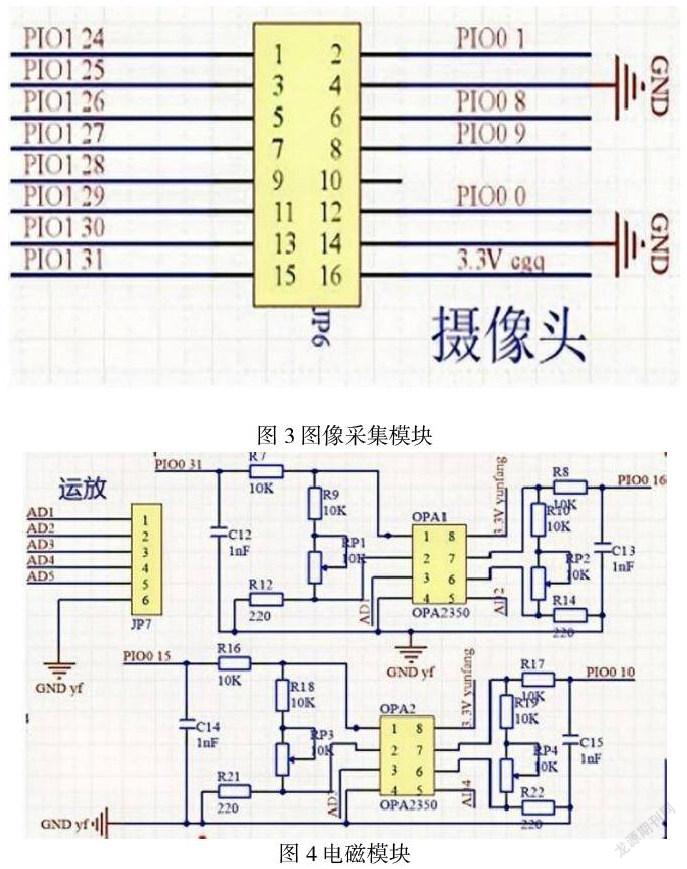
(二)摄像头模块
采用MT9V032数字摄像头采集图像进行处理,由于底层已经由厂家设计好,所以硬件设计比较简单,只需要对应接口与单片机连接即可。
(三)电磁传感器模块
道路采用给流过固定电流的铜导线作为导引线,故采用电感传感器采集电磁信号进行处理,帮助循迹。用两对左右对称的电感来采集信号,外侧电感为一字型电感,测量稳定,不易窜道,内测电感为八字型电感,测环岛时某一侧八字电感与铜导线相切,电磁信号几乎为0,便于检测到环岛。采用opa2350芯片对电感收集的电磁信号进行一级放大,得到稳定的电磁信号,再输入给单片机,进行软件方面的处理。
(四)红外线测距模块
道路元素中有坡道元素,在普通的白色赛道上使用前瞻远的摄像头传感器,速度更快,但也有弊端,在行驶到坡道时,摄像头仰角大,能采集到天花板等非赛道元素而窜道,这时候使用红外测距模块,提前判断到坡道元素进而编写程序禁止窜道,极大地增加了稳定性。
(五)速度检测模块
智能车的速度控制是闭环控制,故需要将运行速度反馈回来,故用到了编码器,可以直接检测车轮速度。
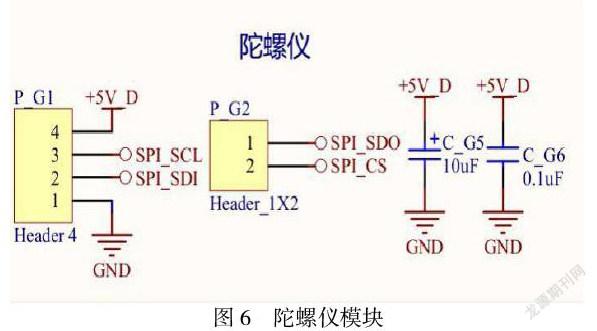
(六)陀螺仪模块
这里我们使用的是L3G4200D,由ST推出,其三轴共用的结构可以让轴与轴之间的信号干扰基本消失,从而让输出信号免受干扰信号的影响。为了让角度计算更加精准,我们将陀螺仪固定在了主板上,并尽可能的贴近车的主轴。
(七)人机交互模块
实验调试中,为了实时、便捷的掌握车的运行状态和参数变化如传感器的状态、舵机的转角等,用于输入参数、策略调整的拨档开关与含有液晶屏幕的数字键盘也必不可少。
(八)电机驱动模块
双极性电机驱动电路和单极性驱动电路是桥式电机驱动电路的两种通常选择。由于输出电流交流成分较多,双极性驱动电路更容易导致电机发热和消磁;因此可逆单极型桥式直流电动机成为了我们的首选,四支N沟道功率 MOSFET管组成了它的功率元件,得益于此功率元件,100A以上的额定工作电流不在话下,这也让电动机的工作转矩以及转速获得了很大的提升。[2]
(九)舵机驱动模块
舵机上每个固定的占空比都对应着固定的打角,使用时只要将舵机先标定好,就可以轻松控制它的打角。在 S3010舵机中,为使其两侧打角最大程度地对称,理论中值便显得尤为重要,因此我们需要先测得它——分别测试它的左极限和右极限对应的占空比,取平均后得到的值,这便是舵机的理论中值,将舵机调到该中值之后,再安装到车模上。
四、软件
(一)图像处理简介
我们认为整个设计的核心所在是智能车采集图像信息的底层处理算法部分,它是整个上层控制策略的基础。而上层控制策略受到三个方面的影響:一是图像采集的稳定性,二是图像处理方法,三是路径识别的准确性,因此必须准确的识别出路径信息,智能车才能实现高速稳定行驶,全局快门摄像头MT9V034则成为了我们实现它的利器。
(二)图像处理
利用摄像头采集技术单片机得到图像信号。实验中需对这些信号进行处理,否则会出现过多的干扰信息。为了适应不同光线的场地,对采集到的图像二值化的黑白阈值要做到随环境调控。对于灰度图像阈值的确定最终采用了最佳迭代法。首先最佳迭代法确定图像黑白阈值的运算时间仅仅为大津法的1/5,同时在同一个环境的光线下,在第一次满足给定的约束条件后,将此阈值作为下一次逼近的初值,可以更快的划分黑白阈值。迭代法图像二值化:首先初始化一个阈值Th,然后按特定的策略对其不断更迭代新,直到满足给定的约束条件为止。
(三)道路识别及处理
1.正常循迹
正常循迹中我们利用来道路双边特征明显的特性,以此来作为摄像头进行判断的依据。同时我们采用了动态多行平均判断,即通过对摄像头采集的每一行数据进行分析计算出中点值,提取出最优化的道路特征,并以此特征进行循迹。
2.十字识别及处理
当摄像头采集的图像中存在多行全白时,则表明小车遇到了十字路口,此时小车会按照四个角进行补线,之后会正常循迹行驶。
3.环岛识别及处理
使用中间电感的加倍特征来判断已经处于环岛状态。当判断进入环岛状态后,通过内八电感进行左右环岛判断,当内八电感到达特征值时进行强制舵机定时打角处理。
4.坡道识别及处理
对于坡道的处理,通过使用陀螺仪直接采集车身的状态来判断坡道。
5.电磁寻迹处理
根据电感值提取出直道与弯道的赛道类型,采用动态PD,即相当于在直道P较小,弯道时P很大,是一个动态P且是连续顺滑的控制曲线,电磁寻迹采用基本差比和方法,作为辅助备用寻迹策略。
五、控制算法
(一)PID算法
详见下文中的图7,描述了PID的算法流程;图像识别模块的角度环PLD控制原理图如图8所示,PID算法的公式如图9所示。
(二)舵机PD控制
由实际赛道的中值与理想的赛道中值之间的偏差,和当前偏差与前一次偏差只差,共同作用计算出舵机的占空比,使舵机打角及时准确。我们使用的PD控制器能让舵机快速响应且提高稳定裕度。
(三)电机PI控制
在闭环控制的部分中,电机通过PI控制器消除静差,提高系统无差度。
(四)滤波器的设计与实现
内部低通不在我们的考虑范围内,这里我们用传感器实现,用他确定由震动产生的噪音截止频率,噪声信号进行处理则由二阶巴特沃斯滤波器实现。
六、结论
在本设计中,我们成功实现了智能小车的两个基本功能。但现实应用时,路面情况更为复杂多变,仅靠基本功能难以应对高难度、高精度的任务,还需配合更先进的技术与元器件以及更好的控制程序实现来这些任务。
参考文献:
[1]李雷.基于MCS-51控制的军用自动仓储搬运机器人设计实现[J].系统仿真技术,2011,7(2)100-103
[2]吴祥,王冠凌.基于电磁导航智能车的控制研究及实现[J]四川理工学院学报(自然科学版)2015,(6),42-46
基金项目:安徽财经大学2020年省级大学生创新创业训练计划项目,项目名称:基于物联网的智能车导向与避障,S202010378383。
作者简介:
1.龙银银(2000.—),女,汉族,安徽池州人,安徽财经大学日语专业四年级在读本科生,主要从事日本文化、中日翻译研究并参与智能车技术研究。
2.许秩茂(2001.—),男,汉族,安徽铜陵人,安徽财经大学计算机科学与技术专业三年级在读本科生,主要从事计算机原理、数据结构、算法设计研究并参与智能车技术研究。
