合成孔径声呐技术的现状及未来趋势
2021-10-21万骏
万 骏
(中国船舶重工集团有限公司第七一〇研究所 湖北 宜昌 443000)
1 引言
近年来,随着全球各国对海洋领域的探索越来越迫切,水下目标地形地貌的精准探测成像技术成为当下研究的热点问题。合成孔径声呐技术作为一种全新的三维成像技术,与雷达技术基本相似,它的工作原理是通过匀速直线运动中的小孔径基阵,周期性向目标位置点发出线性调频信号,根据接收到的信号累加到一起,形成连续的虚拟大孔径基阵,以此提高声呐的高分辨率,确保对水下地理环境面貌的全覆盖测量,精准测量出水下位置的深度信息,实现水下目标三维成像的精准化、科学化。该技术的最大优势是成像的分辨率较高,与水下地形地貌的距离远近及信号的频率无关。在民用领域主要是应用在海洋开发、地质勘探、海底地貌绘制等方面。
2 合成孔径声呐技术的发展历程
2.1 国外的研究现状
美国雷声公司在航天、航空等领域有着突破性的技术。该公司于1967年最早开始对合成孔径声呐技术进行研究,在最初研究时期技术进步程度缓慢,大多数专家都在对技术解决图像绘制问题的可行性进行探讨,当时社会上主流观点认为,由于水声信道传播的环境比较复杂,不同信号回传之间会出现干扰,尤其是在浅海地区传播环境更差,他们普遍认为水声信道不利于合成孔径处理[1]。由于声波载体的传播速度,较其他电波传播的相对较慢,造成信号空间采样率比较低,影响合成孔径声呐发射载体的运行速度,使得水下地形地貌绘制的效率大幅度降低。在这个阶段大部分学者对合成孔径声呐技术的前景不看好,但另一部分学者仍然坚信合成孔径声呐成像技术会解决现有的探测问题,他们另辟蹊径,在实验室经过一系列的探索和研究,最终发现水声信号的相干性可以满足合成孔径成像的需求,载体运行速度慢、信号空间采样率低等问题也可以通过多子阵的算法得以有效解决。进入到20世纪90年代,随着人们对海洋的开发和利用,在巨大的民用和军事市场需求的拉动下,欧美国家持续将合成孔径声呐技术作为研究课题,使得该技术获得突飞猛进的发展,相关技术水平不断成熟,应用领域逐步扩大到民用范围。1993年,新西兰研制出SAS系统,这是全球第一台合成孔径声呐海式样机系统,对海洋探测具有里程碑式的意义[2]。而后随着各类算法不断完善,探测水平已经可以实现大范围内对海底面貌进行绘制,图像的分辨质量也获得大幅度提升。
2.2 国内的研究现状
我国在合成孔径声呐的研究方面起步较晚,但随着我国对军事及海洋探测方面加大投入,国家将合成孔径声呐技术作为重点攻关课题,随着国家高技术研究发展计划(863计划)课题的实施,在原国家科委主任宋健院士的组织下,合成孔径声呐技术于1997年开始实施研究,中科院声学所和中船重工业715所开始分别组建了科研团队[3]。1998年,中科院声学所第一次在湖面上进行合成孔径声呐测试,获得了水面下大量清晰的水底成像图。到2000年,中船重工业715所对SAS系统进行动态测试,对出现的相位差进行补偿,使合成孔径探测技术不断完善。到2002年,我国研制的湖面测试样机获得成功,分辨率能够达到10 cm,可探测水面下的距离达到400 m,这是我国第一台拥有自主研发实力的合成孔径声呐系统,而后在我国近海领域测试取得较好成效。历经长时间的研发,到2012年中国科学院声学研究所完成高频型SAS和双频型SAS的研发,至此我国合成孔径声呐技术已经取得突破性进展,能够完成海底地形地貌和掩埋管道的探测。并在
2018年,中国科学院声学研究所确定了合成孔径声呐国内行业标准,为行业的发展指明了正确的方向。
3 合成孔径声呐成像技术
3.1 合成孔径的基本原理
合成孔径声呐是基于方位调整增强分辨率信号的一种处理技术,它与常规的信号波束的不同之处,是根据船舶载体的匀速运动形态,采取周期性的发射频率发送声呐信号,对接收的信号进行相位的叠加,使信号的脉冲宽度变得很窄,虚拟形成连续的大孔径基阵。如图1所示,在孔径的运动方向上有X、Y、Z 3个方位地点,在X点的地方,目标位置在发射声呐信号的前沿,在Y点的地方,目标位置在发射声呐信号的中间,在Z点的地方,目标位置在发射声呐信号的后沿。从X到Z之间的距离,总体上构成合成孔径长度LXZ,这代表在这个区间内回传的声呐信号可以相互叠加,这是回传声呐信号合成处理的最大距离。再根据各个虚拟位置接收到的信号进行叠加,由此得到该方向上的窄波通道,进而提高水下呈现技术的高分辨率。合成孔径声呐技术本质就是通过时间的叠加来实现空间增益的效果。
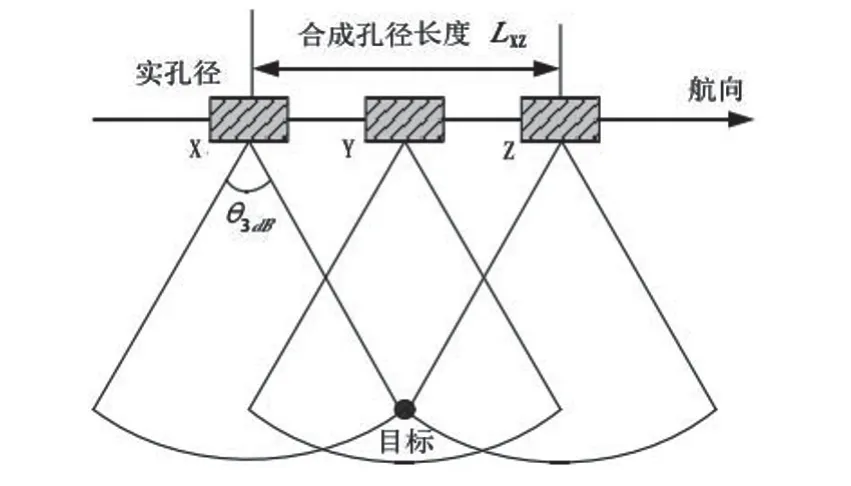
图1 合成孔径声呐技术工作基本原理
3.2 合成孔径的成像算法
成像算法是合成孔径声呐技术的研究难点,由于调频发射机发射载波初始位置不同,就会发生相位变化,由此造成图像的准确性下降,需要采用合成孔径的成像算法,解决各调频发射机开机时载波初始相位不同引起的相位差对成像图的影响。合成孔径之所以能够绘制水下地貌,很重要的原因是通过发射信号,根据接收信号的时延数据计算出目标距离与收发能换器之间的距离,通过演算得出目标距离的具体位置及地理环境。合成孔径成像算法主要有时域延时求和算法、距离多普勒算法、Chirp-Scaling、波数域算法等算法[4],各个合成孔径成像算法的不同,各自的特点也不相同,优势和劣势也各不相同。如时域逐点延时相加法是合成孔径声呐基础的成像算法,该算法运算的效率没有其他算法高,其运算量巨大,但该方法对于接收多个矩阵成像及空间成像不均匀性影响小,算法十分灵活。假设n和m是方位的样本点和距离向样本点,则该算法的图像输出公式是Msa代表着合成孔径的采集数量表示载体运动引起的时延变化。而距离多普勒算法虽然效率较高,但由于需要插值计算,使得回传声呐信号的精度下降,需要通过二阶距离压缩(SRC)方式进行处理。每种算法都有其各自的优势,可有效解决初始位置不同而引起相位差的问题,经过近些年对算法的研究及应用,合成孔径算法可以说是已经趋于成熟,能够满足日常对探测环境的应用需求[5]。
3.3 合成孔径的运动补偿
在复杂多变的海洋环境中,由于船舶中受潮汐、海流以及风浪的影响较大,载体无法严格按照直线航迹匀速运动,船舶在行驶中会使航线发生偏离现象,这种运动的误差最终会影响合成孔径成像的质量。运动误差见图2。
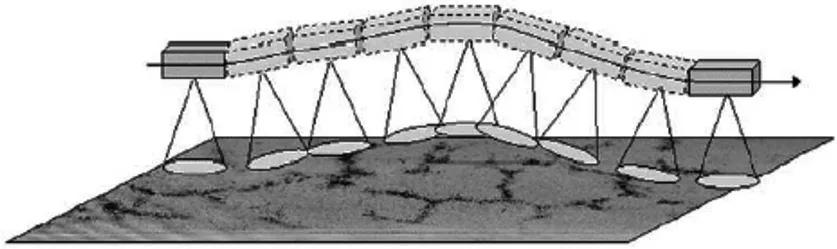
图2 合成孔径声呐实际运动轨迹
为确保图像质量不发生误差,载体航线的线路要尽可能保持平直,最大偏移误差要小于±(λ/8~λ/4),否则就会对最终成像的质量产生明显影响。因此,若想达到高分辨率的图像,必须要通过运动补偿的方式,减少航行因素带来的影响。
4 结语
综上所述,合成孔径在雷达及海洋探测中的应用程度已远超过最初的设想,实现了快速的发展。但目前合成孔径声呐系统的测绘速度仍然是制约该技术发展的难题,为实现合成孔径声呐的实时性测绘,未来需要进一步改善算法,增强测绘的速度及准确性。相信随着合成孔径声呐技术理论及实践研究的不断深入,未来SAS系统的处理速度与处理能力会大幅度提升,运动补偿的技术也会随之进步,相应的成像分辨率与质量也将更清晰。
