中国“北斗”加持全自主快速交会对接
2021-10-21黎峰一刘宁波赵文亮刘宪阳航天恒星科技有限公司
黎峰一 刘宁波 赵文亮 刘宪阳(航天恒星科技有限公司)
2021年6月17日09
:22,搭载神舟十二号载人飞船的长征二号F遥十二运载火箭,在酒泉卫星发射中心准时点火发射。随后,神舟十二号载人飞船与火箭成功分离,进入预定轨道,顺利将聂海胜、刘伯明、汤洪波3名航天员送入太空,飞行乘组状态良好,发射取得圆满成功。17日15
:54,神舟十二号载人飞船采用自主快速交会对接模式,成功对接“天和”核心舱前向端口,与此前已对接的天舟二号货运飞船,一起构成三舱组合体,整个交会对接过程历时约6.5小时。
神舟十二号载人飞船配备的星载全球导航卫星系统(GNSS)接收机全程利用北斗三号全球卫星导航系统完成绝对定位解算,实现全球范围内米级高精度定位,保障了飞行器单独飞行任务;在交会对接段,星载GNSS接收机全程利用北斗三号全球卫星导航系统进行载波相位差分解算,实现厘米级高精度的相对测量,有效保障了交会对接任务的顺利完成。这是继天舟二号任务之后,我国利用“北斗”载波相位差分技术实现全自主快速交会对接的第二次在轨实战应用。
1 GNSS测量在空间交会对接任务中的应用
载人航天工程空间交会对接任务中,我国采用GNSS相对测量,以及雷达、光学等综合测量方式,通过测量精度阶梯化、作用距离接力式来实现高精度相对测量。GNSS相对测量由星载GNSS接收机构成的相对测量子系统实现。中国空间站建造任务中,空间站核心舱、载人飞船、货运飞船,以及未来即将建设的实验舱均配备了星载GNSS接收机,完成导航信号捕获、跟踪、定位测速解算等,为船、站提供绝对定位和高精度相对定位信息。
GNSS相对测量子系统在空间交会对接任务中,提供远距离引导和近距离高精度测量服务,要求具备以下特点:
1)全球覆盖连续服务;
2)远距离米级相对测量;
3)近距离厘米级高精度稳定测量;
4)适应空间高动态环境;
5)适应空间单粒子、电离层特殊环境。

中国空间站示意
2 “北斗”相对测量子系统的技术路线
2020年7月,北斗三号全球卫星导航系统正式开通。2021年5月30日05 : 01,天舟二号货运飞船精准对接于“天和”核心舱后向端口,我国首次利用“北斗”载波相位差分技术实现全自主快速交会对接。2021年6月17日15 : 54,神舟十二号载人飞船成功对接于“天和”核心舱前向端口。两次交会对接任务的顺利完成,是GNSS相对测量子系统利用全面建成的北斗三号全球卫星导航系统实现空间高精度导航应用的典型代表。
“北斗”相对测量子系统由空间站配备的星载GNSS接收机(目标端)和飞船配备的星载GNSS接收机(追踪端)共同组成。追踪端和目标端GNSS接收机接收北斗卫星导航信号,提取观测数据,进行绝对定位解算;目标端接收机输出的空空通信数据,由空空通信机传送至追踪端接收机,追踪端结合本地原始观测数据进行差分解算,获得追踪端飞行器与目标端飞行器间的相对位置和速度信息。
“北斗”相对定位差分技术的工作原理是利用卫星时钟、卫星星历、电离层延迟等误差所具有的时空相关性这一客观事实,通过差分的方法消除或削弱绝大部分误差,使两飞行器相对测量精度达到实时厘米级,之后处理为毫米级。
基于“北斗”的高精度相对定位差分技术主要有伪距差分、载波相位差分两种,分别以伪距和载波为基本观测量,通过双差模式消除或削弱大部分误差。交会对接过程中,两飞行器上星载GNSS接收机构成的“北斗”相对测量子系统,根据基线距离提供不同精度的相对测量服务。在准备段100~1000km范围内,提供基本导航服务,解算精度为米级;在对接段10~100km范围内,提供远距离引导的伪距差分服务,解算精度达到亚米级;在100m~10km范围内,提供近距离高精度载波相位差分服务,解算精度达到厘米级。交会对接完成后,在组合体运行阶段,GNSS接收机仍能继续提供米级精度的基本导航服务。
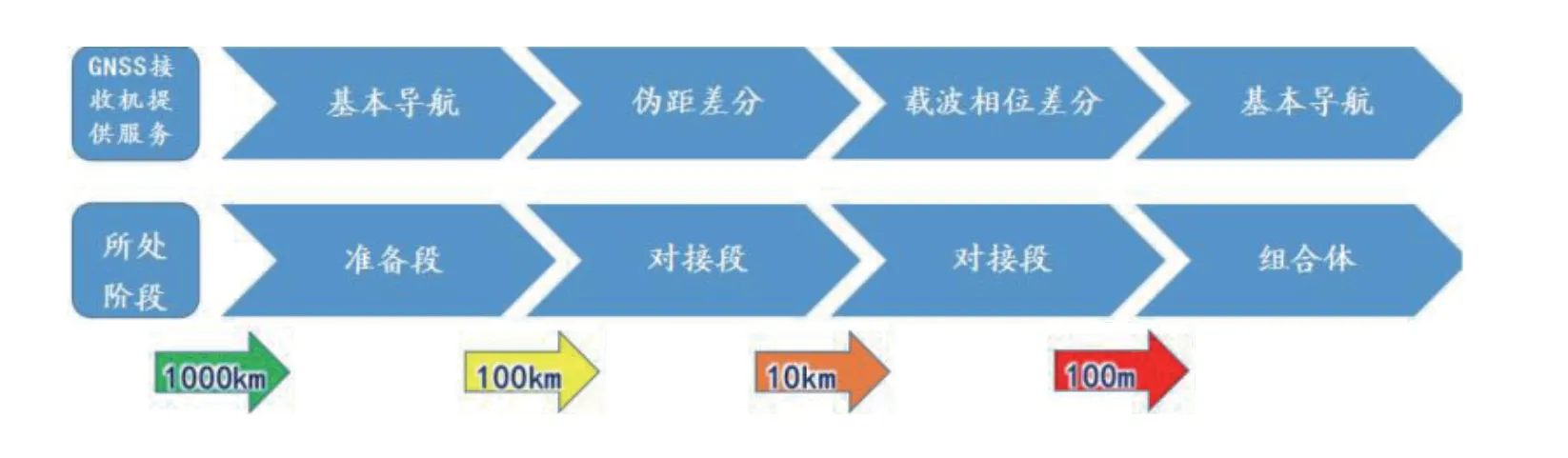
“北斗”相对测量子系统在空间交会对接任务中的服务过程
3 “北斗”相对测量子系统的关键技术与面临的挑战
载波相位差分技术
星载GNSS接收机在高速运动状态下进行信号接收,历元间极易发生卫星跟踪中断,需要进行实时递归处理。同时,历元间电离层等影响变化大,增加周跳次数和模糊度参数增减的难度,考验模糊度监测能力。针对以上挑战,需实施针对性的高精度载波相位差分技术,其关键技术如下:
1)基于通道环路参数的周跳检测技术。基于锁相环、锁频环及IQ支路信号功率特性等通道环路参数检测载波周跳,确保序贯处理的有效递推。
2)相对测量优化选星技术。利用组合遍历法对相对精度因子(RDOP)数值进行递推计算,基于RDOP最小原则进行共视星优选。
3)伪距载波联合解算和序贯最小二乘解算。利用伪距引导载波相位求解,解决载波方程秩亏问题;利用前一历元和当前模糊度及权值矩阵、系数矩阵、序贯求解模糊度浮点解,加快模糊度收敛速度。
4)最小二乘模糊去耦调节法 (LAMBDA方法) 整周模糊度搜索。利用LAMBDA方法搜索模糊度,确保模糊度搜索效率和有效性。
测量与定位域数据联合监测技术
空间站轨道高度通常在400km左右,飞行器运动速度快,致使接收到的卫星信号变换频繁;受电离层影响,载波周跳频繁,飞行器难以获取高动态连续且高可靠的数据。针对以上挑战,提出测量与定位域数据联合监测技术,可有效弥补传统自主完好性监测(RAIM)方法在单颗卫星故障情况下的瓶颈。同时,对高精度差分的测量数据优选提供了精准的决策机制,大幅提高了高动态环境下定位结果的可靠性,其关键技术包括:
1)测量域伪距监测。利用基于轨道预测的测量前置监测,以及基于最小二乘残差法进行伪距异常等故障检测和识别,可实现对故障星的有效屏蔽。
2)定位域模糊度监测和残差监测。模糊度监测是对整数解与初始解(浮点解)基线向量一致性检验,对整数解与初始解单位权中误差一致性检验;残差监测指利用周跳探测技术进行可用性评估。
空间环境干扰抑制技术
空间复杂环境对于北斗卫星导航信号的影响主要表现为电离层及多径的影响。空间站轨道高度处于电离层F2区域中电子密度最大的区域,信号穿过不均匀体的变化更为剧烈,对星载GNSS接收机的影响也更为严重。针对以上挑战,提出空间环境干扰抑制技术,通过对在轨数据的分析,从接收机信号处理、定位解算监控、故障预测与规避等多个层面开展针对性抑制和规避措施设计,包括:
1)利用自适应感知环境的抗闪烁环路技术、多系统兼容接收与故障自主监测技术、高动态场景下的快速恢复技术、抗多径天线技术,提高信号接收处理能力。
2)利用基于轨道预报信息的定轨技术,多传感器的融合定位与故障规避技术。
3)开展电离层闪烁的预报与任务规划。
4 结语
空间交会对接技术是航天工程中的一项关键技术,是空间站建设、载人登月、空间在轨服务以及星际航行的基础和保障。相对测量系统是实现空间交会对接任务的关键组成部分。利用“北斗”载波相位差分技术实现两飞行器交会对接,将是未来空间交会对接领域发展的重要方向,为后续空间站与货运飞船、载人飞船频繁交会对接的需求提供有效技术保障,为基于北斗导航系统的高精度测量在空间导航领域的应用奠定坚实基础。
