我国小天体探测任务设想
2021-10-21余后满张熇黄晓峰孟林智曾福明王向晖
余后满 张熇 黄晓峰 孟林智 曾福明 王向晖
(1 中国空间技术研究院 2 北京空间飞行器总体设计部)
小天体是太阳系重要的组成部分。研究普遍认为,小天体保留了早期太阳系起源、形成与演化时的重要信息,可能蕴含着地球生命起源的重要线索,是研究太阳系起源的“活化石”。开展小天体探测在揭示生命起源、推动技术进步、开发天然资源、保护地球安全等方面意义重大,影响深远。小天体探测任务是我国行星探测重大工程规划的又一个标志性项目,将通过一次任务,实现对近地小行星的近距探测、采样返回以及对主带彗星的探测,有望突破多项关键技术,获取原创性科学成果,进一步提升我国的深空探测技术能力,力争在小天体探测技术领域进入国际先进行列。

1 小天体简介
根据国际天文学联合会(IAU)修订后的行星定义,太阳系天体被分为行星、矮行星以及太阳系小天体。
小天体主要包括小行星和彗星。其中,小行星是太阳系内类似行星环绕太阳运动,但体积和质量比行星小的岩石或金属天体。彗星是进入太阳系内,亮度和形状随日距变化而变化的绕日运动天体,一般由彗核、彗发和彗尾等组成。主带彗星是指运行在小行星带(火星与木星轨道间)内的活跃小行星。
2 国外小天体探测发展概述
国外小天体探测典型任务概况
小天体探测已有30多年历程。早期的探测任务只是飞掠探测,例如美国的“伽利略”(Galileo)任务,对木星进行了探测。自20世纪90年代以来,小天体探测活动日益增多,共实施了6次以小行星探测为主要目标的任务和3次以彗星探测为主要目标的任务。2012年,我国的嫦娥二号月球探测器也实现了对图塔蒂斯(Toutatis)小行星的飞掠探测。美国、欧洲、日本先后以飞掠、绕飞、采样返回等多种方式完成了小天体探测。以下为几种典型任务。

太阳系中的小行星分布(左)和典型彗星轨道(右)
(1)任务1:美国“近地小行星交会”探测器
2000年2月14日,美国“近地小行星交会”(NEAR)探测器顺利进入距爱神(Eros)小行星表面35km的绕飞轨道,对其进行了全面观测,获得了该小行星的体积、形状、质量分布、重力场、自转、成分和地质学数据等。探测器利用多光谱成像仪拍摄得到的数据,对小行星表面的撞击坑进行了观测,其表面大部分区域有多个直径小于1km的撞击坑,以及大量分布不匀的由撞击形成的巨石。
(2)任务2:日本隼鸟-1、2探测器
2005年9月12日,日本隼鸟-1(Hayabusa-1)探测器飞抵距离糸川(Itokawa)小行星表面高度20km的位置,成功传回近距离拍摄的小行星图像。同年11月,隼鸟-1自主控制下降、接触糸川小行星,向表面射入5~10g的弹丸,用装置收集了溅起的颗粒,成为世界上首个实现小行星取样返回任务的探测器。由于探测器在轨发生故障,隼鸟-1于2007年4月25日才正式开始返回地球,历时3年,于2010年6月13日成功降落在澳大利亚南部地区。地面对样品容器进行确认后表明,只获取了约1500个微米级颗粒。
2014年12月,日本发射了隼鸟-2探测器,并在2018年顺利到达龙宫(Ryugu)小行星。经过一年多近距离探测后,发射了小型撞击器,探测器以“一触即离”方式对撞击后的新鲜表面进行了采样。2020年12月6日,返回舱顺利着陆在澳大利亚南部地区,经确认获取了约5.3g小行星样品。
(3)任务3:欧洲“罗塞塔-菲莱”探测器
欧洲航天局(ESA)“罗塞塔-菲莱”(Rosetta-Philae)探测器是首次完成彗星表面着陆探测的探测器,开展了67P彗星的全球勘测,实现了低轨道绕彗核观测和彗星表面着陆探测。探测器包括一个轨道器和一个着陆器。轨道器完成了彗星的全球近距观测。在轨释放“菲莱”着陆器实现着陆时,着陆器上的冷气喷射装置出现故障,最终着陆器经历两次弹跳,以姿态倾斜过大的角度停留在彗星表面,偏离预定地点上千米左右。虽获取了少量高分辨率图像,但最后因为太阳帆板光照不足,科学探测任务未能按照预期完成。
(4)任务4:美国“奥西里斯-雷克斯”探测器
2018年12月31日,美国的“奥西里斯-雷克斯”(OSIRIS-Rex,以下简称“奥西里斯”)探测器飞抵贝努(Bennu)小行星轨道并开展绕飞探测。2020年10月21日,探测器顺利实现在夜莺(Nightingale)采样区的短时触碰采样。采样过程中,探测器采用“气体激励”方式成功采集到了样品。目前,探测器运行在返回转移轨道,计划于2023年9月携带样品返回地球。
国外小天体探测发展态势
(1)小天体探测任务科学目标亮点多,新技术带动性强
小天体以其独特的物理、化学和矿物质特性,成为揭示太阳系起源及演化过程等重大科学问题的关键。如“罗塞塔-菲莱”探测器通过同位素测量,表明地球上的水并非来自于彗星,使科学家转而思考地球上水的其他可能来源;隼鸟-1在地面实验室中对样品进行了氨基酸、多环芳香烃等有机化合物的分析测试,结果证明糸川小行星的有机化合物属于非生物成因。隼鸟-2和“奥西里斯”任务也分别就小天体的形成过程、物质组成等形成大量科学成果,发表在《Science》《Nature》等具有国际影响力的期刊上。
小天体探测任务周期长、目标距离远、目标特性具有较大不确定性,对探测器的轨道设计与优化、新型推进技术、自主导航与控制、探测器自主管理、微重力下采样技术等均提出了更高要求,有利带动了新技术的发展和应用。
(2)小天体探测已成为国际深空探测的新热点
小天体探测任务以其独特的科学价值和技术挑战,得到了各主要航天国家的高度重视。在未来空间探测计划中,美国国家航空航天局(NASA)规划了开展特洛伊(Trojan)小行星探测的露西(Lucy)任务和灵神星(Psyche)小行星探测任务。NASA与ESA将合作开展“小行星撞击与偏转评估任务”(AIDA) ,计划撞击双体小行星中较小的一个目标,并通过两个小行星相对距离的变化评估撞击的效果。日本与德国将合作开展法厄松(Phaethon)小行星探测任务,计划2026年前后抵达该小行星附近,对其周围的尘埃成分进行探测。由此可见,小天体探测已成为主要航天国家深空探索领域的重点发展目标之一。
3 我国小天体探测任务概述
任务目标
我国的小天体探测任务,将通过一次任务实现对近地小行星的近距离探测、采样返回和主带彗星探测,开展遥感探测、就位探测以及样品实验室分析相结合的多种探测活动,使我国小天体探测的科学与技术达到国际先进水平。
任务的科学目标主要包括:
1)测定近地小行星和主带彗星的轨道参数、自转参数、形状和热辐射等物理参数,开展轨道动力学研究;
2)开展近地小行星和主带彗星的形貌、物质组分、内部结构以及可能的喷发物等研究;
3)对返回样品开展实验室分析研究,测定样品的物理性质、化学与矿物成分、同位素组成,以及结构构造,开展小行星和太阳系早期的形成与演化研究。
探测器组成
探测器系统包括主探测器及返回舱。主探测器完成近地小行星转移、绕飞详查、采样转样、返回地球、返回舱分离、主带彗星转移及科学探测全周期的飞行任务;返回舱采用弹道式再入方式,通过“气动外形+降落伞”的方式完成减速并着陆于地球。
2019年4月19日,国家航天局发布了《小行星探测任务有效载荷和搭载项目机遇公告》,面向国际公开征集科学载荷和搭载项目方案。拟配置的有效载荷包括:窄视场导航敏感器、激光一体化导航敏感器、多光谱相机、可见光红外光谱仪、热辐射光谱仪、中视场彩色相机、多光谱相机、探测雷达、磁强计、带电粒子与中性粒子分析仪、喷发物分析仪等。这些载荷将对目标小天体的自转参数、形状、地质形貌、表面热辐射特性、表面物质组分、内部结构、磁场环境等进行全面的探测。
飞行过程
探测器系统将采用长征三号乙运载火箭在西昌卫星发射中心发射。经过近1年的飞行,到达近地小行星2016HO3附近。采用绕飞、悬停等方式,对其开展详细科学探测。根据获取的信息,反演小行星地形地貌、星壤、热惯量等方面的特性,据此确定候选采样区。随后择机实施小行星表面采样,并实现样品的有效封装。之后在预定的返回窗口,探测器开始进入返回转移飞行。在地球附近,释放返回舱,返回舱采用弹道式再入,高速进入地球大气层并在预定回收场着陆。这一过程预计在3年内完成。
主探测器拉起后,奔向目标彗星,经历约7年时间飞行到达小行星带,对主带彗星进行科学探测。小天体探测任务探测器在轨飞行共分13个飞行阶段。
任务特点与难点
我国的小天体探测任务,要实现“一次发射,两类探测目标(近地小行星和主带彗星),三种探测模式(绕飞、附着、采样返回)”,任务周期长达10年。整体任务设计创新性强、技术难度大。具体体现在以下几方面:
(1)目标特性不确定性大
现阶段,依靠地面设施观测,对两个探测目标的观测数据和特性认知极其有限。探测目标的自转特性、地形地貌、岩石和风化层、反照率、热特性等参数目前均无法直接获得,只能通过模型分析、与其他小天体和地面陨石比对等方式进行推算,具有较大不确定性。美国的“奥西里斯”和日本的“隼鸟”探测器在研制过程中推算的目标特性,与在轨到达探测后获得的信息均有较大的差异。
基于目前少量观测数据的认知,小行星2016HO3体积小、自转速度较快、引力弱、光变迅速、表面地面地貌和星壤承载能力均未知,对探测器采样和附着提出了更高的要求。
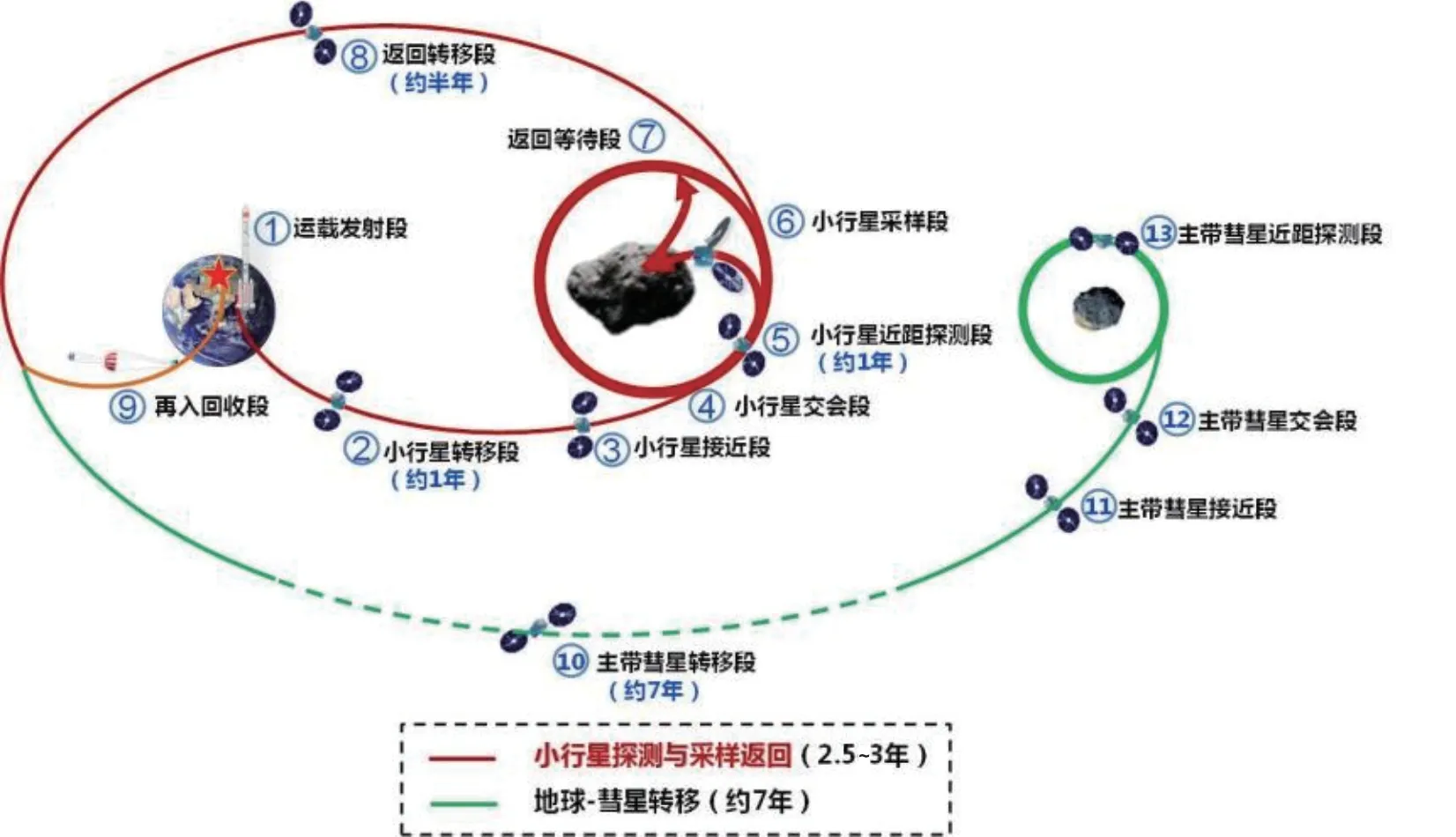
小天体探测任务飞行过程示意
国际上目前成功实现了小行星样品采样的隼鸟-2和“奥西里斯”探测器,均采用的是短时触碰采样方式。为了较好地适应2016HO3小行星地形、表面星壤力学特性等不确定性,针对可能的“碎石堆”或“独石”特性,以及表面不同大小的碎石粒径分布特性,除了触碰采样方式外,还需考虑设计悬停采样和附着采样等多种模式和手段,确保能可靠采集到样品。后续工程实施中,需结合工程可实现性和表面特性研究,深入分析不同采样模式和手段的适应性,优化设计简单可靠、高效快速的采样方案。
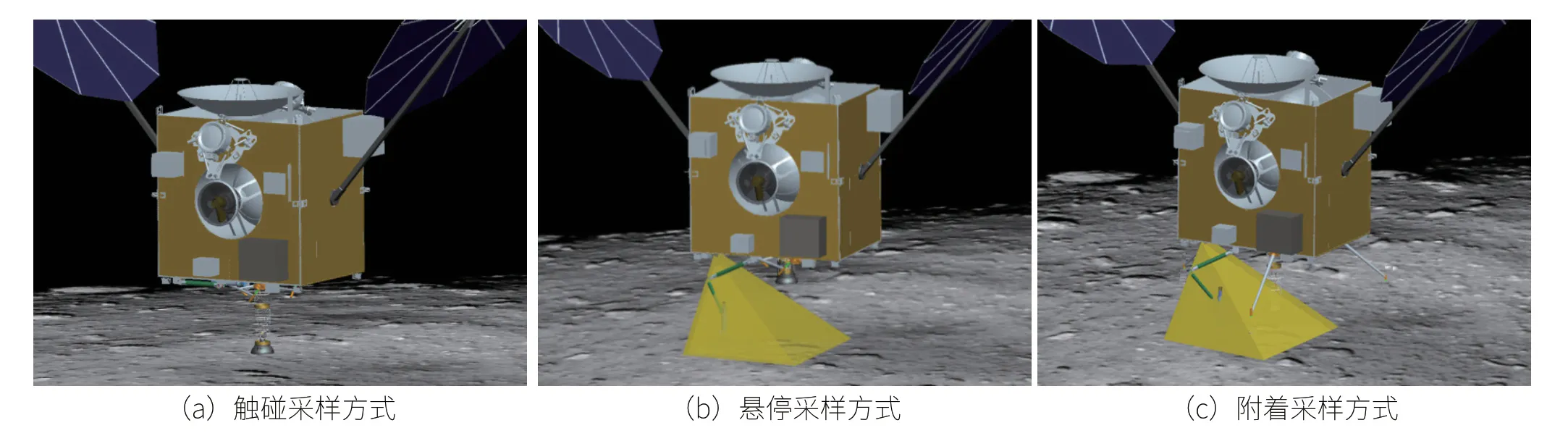
小天体采样方式示意
不同于月球和火星探测任务,月球、火星的着陆区选择以地面已获得的高分辨率遥感探测数据为基础,在任务研制初期开展着陆区的预选;而小天体探测的目标体积小且较为暗弱,地面可获得的目标特性有限且不确定性大,无法在任务研制阶段完成采样区的选择。我国小天体探测任务的采样区、采样策略、采样参数等关键要素无法在地面确定,只能采用“边飞行、边探测、边制订”的策略。在设计上考虑尽量包络各种可能的条件,在轨到达目标附近后,通过长时间近距探测来获得高分辨率的探测数据,建立小行星高精度的三维模型、热模型等,优选采样区,并制定相应的采样策略。
(2)需具备高精度、全自主导航与控制能力
探测器接近小行星后开展的逼近、绕飞探测等一系列近轨操作,是实现小行星采样返回等任务活动的前提和关键。目标小行星2016HO3的引力微弱,星等暗弱,目前地面测定轨的精度无法支持高精度的相对距离与速度估算,要实现与小行星2016HO3的可靠抵近和绕飞,需要研究基于视线测量和轨迹机动自主一体化的设计技术,通过受控轨迹机动,实现探测器的自主相对导航和制导接近过程。
为实现百米级近距离探测,实现小行星的全球覆盖,需研究绕飞、悬停等多种飞行轨道和探测模式,突破二维与三维特征相融合的高精度图像导航技术,实现高速可靠的图像特征在轨实时辨识和匹配导航。
由于小行星2016HO3体积较小,直径仅30~100m,满足采样需求的采样区域极为有限。为保证采样的有效性和安全性,需具备对小行星表面的米级高精度到达能力,并精确控制与小行星的相对速度与姿态。探测器制导、导航与控制系统的设计,需考虑液体晃动、柔性附件等动力学影响,融合多类导航敏感器信息,具备高适应性、高鲁棒性、高自主性和高精度的相对导航与控制能力。
(3)轻小型超高速再入返回难度大
小天体探测任务中,返回舱的再入速度将超过第二宇宙速度,约为12km/s,是我国历次地球返回任务中最高的再入速度。我国已实施的探月工程三期任务返回器验证了再入速度10.7km/s、半弹道跳跃式再入方式面临的相关技术,但小天体探测器返回舱的技术指标、再入方式等与探月工程三期任务存在较大差异,其气动外形的设计需要从实际任务需求出发,同时考虑结构减重、总装布局等约束条件,最终设计出满足任务约束、综合性能最优的新气动外形。
小天体探测器返回舱再入过程中需承受最高约12MW/m的热流,面临高热流、高焓、高剪切力等恶劣条件。此外,系统对防热材料轻量化设计提出了非常高的要求。需设计新的轻质功能梯度防热材料、轻质承力结构及分区域防热结构等,需在地面模拟高焓、高剪切力、对流与辐射耦合加热等热环境,确保防热设计满足任务需求。
(4)特殊环境地面仿真验证难
小天体的表面特性与行星区别较大,需考虑小天体表面的物理状态、微弱引力、探测器与小天体表面的相互作用、探测器姿态与轨迹控制等多项因素的相互影响。地面试验验证涉及星表状态的动力学、微重力、真空环境等,如何实现星壤特性的等效模拟、机构的高精度微重力模拟,以及高速再入返回等关键过程的地面验证,都是必须解决的难题。
针对此次任务中难度最大、最为核心的采样环节,地球重力将显著影响模拟样品的力学特性及其与采样装置的相互作用,必须在微重力环境中测试模拟与采样过程相关的力学特性,并在微重力环境下验证采样装置的功能性能。
(5)长寿命、可靠性、自主性要求高
我国的小天体探测任务周期长达10年,在国内深空探测领域尚属首次。其中,采用的离子推力器将长期在轨工作,返回舱的降落伞、防热结构等将经历长期在轨贮存后工作,对系统可靠性设计、元器件原材料的选用,地面长寿命试验验证等都提出了更高的要求。
小天体探测任务单程通信时延长,实时测控能力大幅降低。近距绕飞、抵近采样、附着关键环节动态特性变化大,无法依靠地面支持完成。同时,在长达10年的飞行过程中,必须设计完善的自主管理及自主安全措施,才能确保全任务周期中的运行安全。因此,探测器需从能源安全、通信安全、姿态安全等各方面,开展全面的自主执行、自主判断、自主故障处置等设计。
4 结束语
小天体探测任务是我国行星探测重大工程的下一个标志性项目,探测器将突破弱引力天体表面采样、高精度相对自主导航与控制、小推力转移轨道、轻小型超高速再入返回、多模式长寿命高可靠电推进等多项核心技术,获取大量科学数据和宝贵的小行星样品;并为进一步提升我国的深空探测能力、推动行星科学的快速发展和航天强国的建设作出重要贡献!
