线阵相机及激光光源在货车装载状态视频监控系统上的应用
2021-10-20刘云超何善宝
资 波, 刘云超, 何善宝
(1.中国铁路广州局集团有限公司 长沙货运中心,湖南 长沙 410205;2.北京康拓红外技术股份有限公司 广州办事处,广东 广州 510000;3.北京信息科技大学 信息与通信工程学院,北京 100000)
引言
货车装载状态视频监控系统是铁路货车装载状态检测的重要系统,利用铁路线路边的线阵相机对运行货车的装载状态进行动态图像检测,以人机结合的方式及时发现货车装载状态异常,从而阻断问题货物车辆上线运行,在全路范围内得到了广泛的应用,成为保障货车运行安全、提高运输效率的基础设施和重要工具。
图像质量是衡量货车装载状态视频监控系统效果的最重要标准,而相机及光源是决定图像质量的重要因素。纵观铁路图像检测设备的发展,相机及光源技术的不断发展极大地推进了其技术的更新迭代。现如今市面上的相机已经采用网络接口来替代最初的1393接口,相机分辨率从352×288到1920×1080,补偿光源从氙气灯到LED灯、从常亮光源到频闪光源[1]。铁路图像检测设备采用的相机及光源技术一直在不停地发展,近些年,在相机和光源的选择上都有了一些进步,本文阐述线阵相机和激光光源在货车装载状态视频监控系统中的最新运用,所用相关素材基于中国铁路广州局集团有限公司霞凝货场货车装载状态视频监控系统项目。
1 相机
最初的铁路现场安全控制图像检测设备大多使用的是面阵相机。通过短时曝光一幅幅图像,面阵相机具备抢拍动态物体的优势。然而这些被拍摄的图像不仅在拍摄方向上无法保证完全的无缝衔接,并且可能存在由信号干扰造成的丢图、窜图等问题,在一定程度上会对远程检车作业人员的正常作业造成干扰。
图1是面阵相机拍摄的侧架拼接图(由六幅照片拼接而成),从图中可以看出,相邻的两幅照片都有较大部分的图像重复,无法做到无缝拼接,增加了远程检车作业人员的工作量。

图1 面阵相机拍摄的侧架拼接图Fig.1 Side frame mosaic image taken by area array camera
1.1 线阵相机介绍
就目前而言,线阵相机被广泛地应用在工业、科研和安全等领域的图像处理上。作为一类特殊的视觉机器,线阵相机采用区别面阵相机的一行感光元素,达到高频扫描和高分辨率的技术要求。线阵相机主要被应用于检测金属、塑料、纸和纤维等连续的材料。当被检测的物体匀速运动时,通常利用一台或多台相机对待检测物体实施逐行扫描,并对扫描得到的图像进行行处理或者面阵处理,从而保证能够均匀地检测到待检物体的整个表面。另一方面,依赖于传感器的高分辨率,线阵相机同时也被广泛地应用于高精度测量,测量精度达到微米级别。
线阵相机的检测视野呈“线”状,其检测得到的单幅二维图像具备很高的列像素数量,但是行像素数量仅为几个而已,鉴于线阵相机的“线”性,它一般被用在以下这两种情况:①同为细长带状的被测视野,这种情况常见于滚筒检测问题;②极大的视野或极高的精度要求,这种情况还需要使用辅助性的激发装置来多次激发相机,实时连续性地拍照,再通过后台来处理多幅“条”形图像,最后拼接获得一幅高分辨率的图像。
如果货车装载状态视频监控系统采用1024分辨率(每行)的线阵相机连续拍摄,拍摄的是整列车的完整图像,可根据需要任意截取。按1400×1024的分辨率计算,像素点为143万余个,并且实现了行车方向图片无缝拼接效果。

图2 线阵相机拍摄的货车单侧拼接图Fig.2 Single side of the truck mosaic image taken by linear-array camera
1.2 成像光学原理
相机的镜头是由若干透镜组成一个镜片组,整体作用相当于一个凸透镜。相机成像的光学原理就是被摄物体反射的光线通过镜头后会在图像传感器成一个反的像,如图3所示。
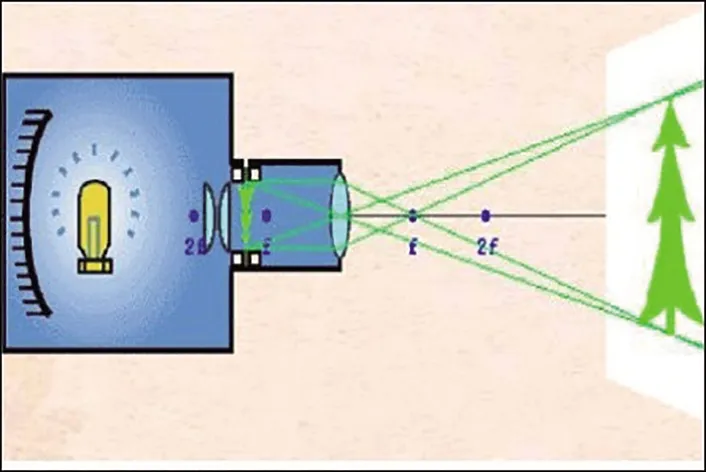
图3 相机成像光学原理图Fig.3 Optical principle diagram of camera imaging
焦距也称为焦长,是光学系统中一种衡量光线聚焦或发散的度量方式,当一束平行光线入射透镜时,透镜光心到光聚焦的焦点之间的距离代表焦距。在照相机系统中,从镜头透镜中心到成像传感器的距离为焦距,单位为毫米级。
在相机系统中,焦距决定镜头的视角,而视角影响在感光面上被摄物的成像大小。镜头的视角同时取决于焦距和感光体的面积。如图4所示,当比较中间和左侧的透镜时,可以发现在两者的感光面积相同的情况下,短焦距透镜的视野范围明显比长焦距的宽阔。同理,当比较中间和右侧的透镜时,可以发现在两者的焦距相同时,感光面积大的透镜比感光面积小的具备更大的视角范围。
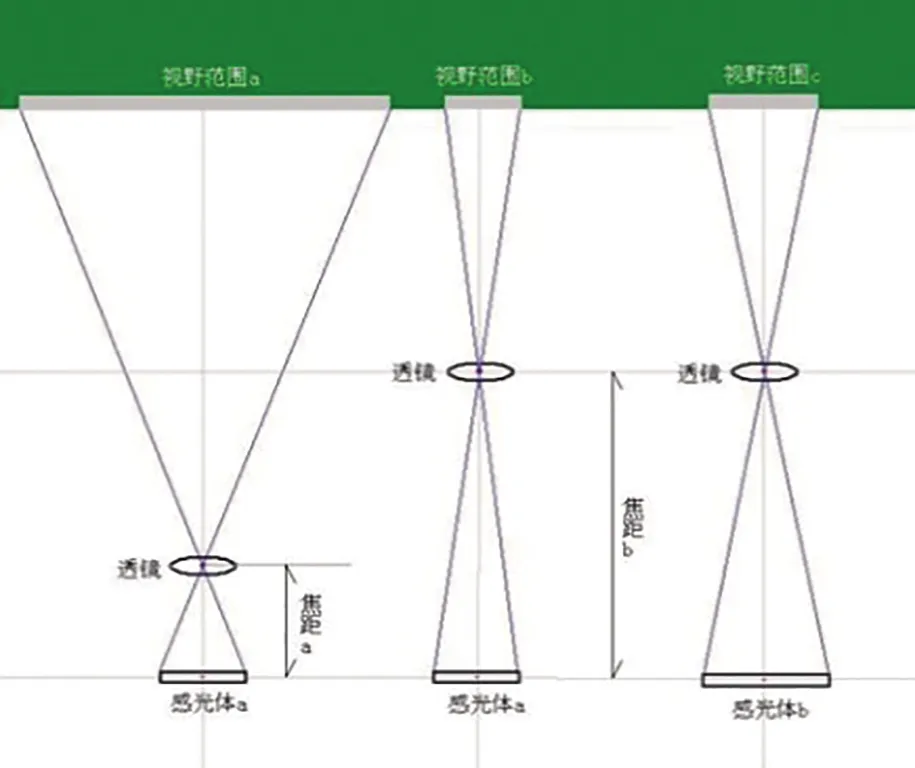
图4 不同感光面积、不同焦距下的视野范围对比示意图Fig.4 Comparison diagram of field of view under different photosensitive areas and different focal lengths
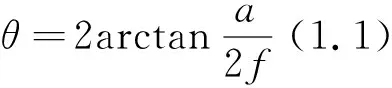
视角计算示意图如下:
货车装载状态视频监控系统使用的线阵相机成像面尺寸为14.34mm。表1列出常用的三种镜头配合货车装载状态视频监控系统所用线阵相机的视角。
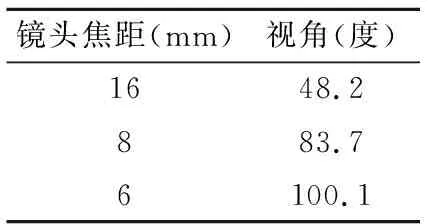
表1 三种常用镜头的视角Table 1 Visual angle of three commonly used lenses
货车装载状态视频监控系统顶部相机使用16mm焦距的镜头,侧部相机使用8mm焦距的镜头,能够根据实际情况获得货车顶部和侧部完整图像。
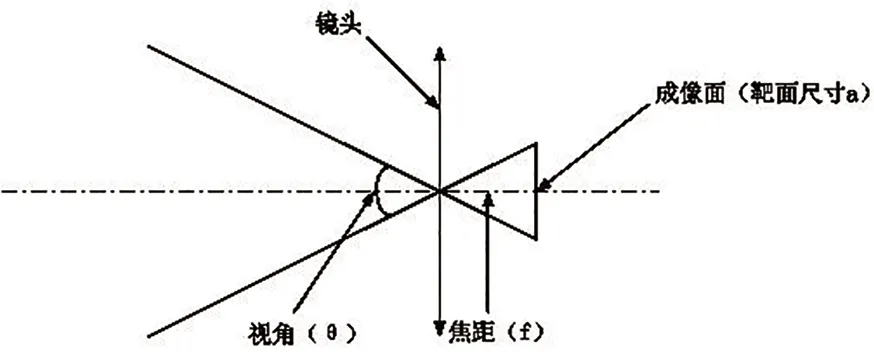
图5 视角计算示意图Fig.5 Schematic diagram of angle calculation
2 补偿光源
2.1 光源波段选取
图6为DALSA spyder3 GigE Vision线阵相机对光谱的敏感曲线,从图中能够直观地看到,此相机在800nm附近波段达到敏感度峰值。
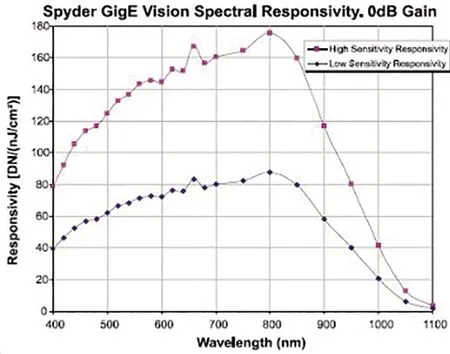
图6 Spyder GigE Vision光谱响应度Fig.6 Spyder GigE Vision spectral responsivity
另外,通常可见光的波长范围为390nm~770nm,而808nm这个波段的太阳光功率密度大约为0.95*808W/m2= 0.7676mW/mm2,其光功率密度小于可见光功率密度,因此采用808nm波段的近红外作为补偿光源,能够满足线阵相机的感光要求。同时由于近红外光具备基本不可见性,很大程度上消除了补偿光源对线路作业人员的光干扰。
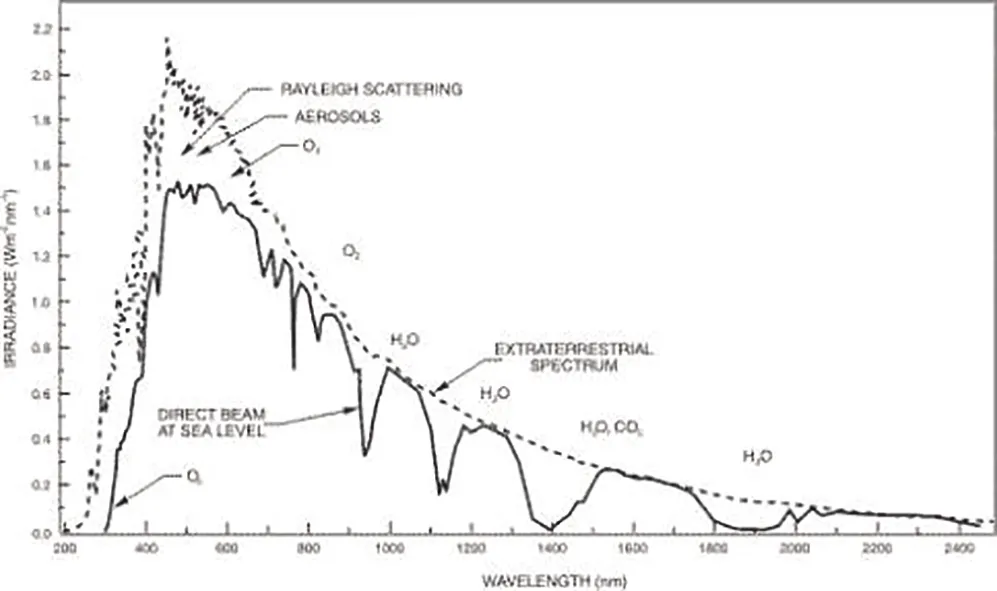
图7 太阳光光谱功率能量分布图Fig.7 Solar spectrum power energy distribution map
2.2 LED光源
LED光源具备亮度高、寿命长、发热小等优点,但是并不契合线阵相机的线性补偿光源需求,同时LED光源发散和无法集中的特性,会导致大部分的能量浪费。
图8展示了以LED作为补偿光源的线阵相机,整条灯带中共包含216个LED,其中每个LED的功率约为3W,则总功率为648W,普通LED颗粒的电光效率大概是25%,则总共的光功率大概为P=162W。

图8 LED补偿光源Fig.8 LED compensation light source
按照理论最大量原则,当所有的LED都被安置在相机中心线上,每个LED的发光角度为15°,则在1.25米处形成的光斑宽度W = 2*1.25*tan(15°/2) = 0.329m,另外按照光斑长度为L = 1.5m计算,则光斑面积S = L*W = 0.494 m2,而在1.25米处的光功率密度EP= P/S= 0.33 mW/mm2。

图9 LED光斑宽度形成示意图Fig.9 Schematic diagram of LED spot width formation
在项目实验中,底箱使用的相机是1个2K高清的阵列相机。从效果看,在所有列车车速下(最高只达到65km/h)LED补偿光源强度只能够满足基本补偿需求。同时,由于车轮内侧所处的位置较隐蔽,反射回相机的光强较弱,导致车轮的局部照片偏暗。
想要提高抗光干扰能力,就必须缩短相机的曝光时间(最短可设置为3us)。从现场相机设置的大于20us的曝光时间能够发现,现场的补偿光源强度低于实际需求。当列车进一步提速时,对应地需要更短的曝光时间,那么既有补偿光源强度便不能满足需要。
2.3 激光光源
激光光源有单色性好、功率大、能量集中等优点。如果在LED的基础上,将光功率密度提高3倍,即0.99 mW/mm2,既能达到线性相机的补偿光源需求,又兼备良好的抗光干扰性。按照1.25处光斑长0.2m、宽0.1m计算,那么所需选取激光光源光功率仅为19.8W。
整个激光补偿光源主要由激光器、光纤、激光镜头组成,其中:激光器作为光源系统的核心,主要用来发射激光;光纤作为激光传输的介质,主要用来连接激光器和激光镜头;激光镜头用于将光纤传输过来的点状激光光斑变成线状激光光斑。
项目中使用的激光器如图10所示,主要由激光控制板、激光模板、散热器、散热风扇构成,其中激光模块光功率可以选择20W,具体的参数信息见表2。
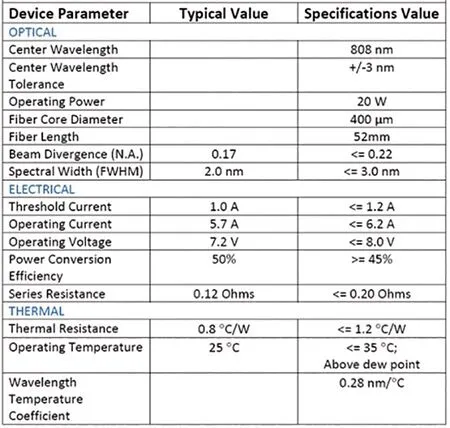
表2 激光光源相关组件参数表Table 2 Parameter table of laser light source components

图10 项目中使用的激光器Fig.10 Laser used in the project
值得注意的是,光纤必须与激光器匹配,图11中所示的光纤参数为:芯径为400um,数值孔径为0.22。而激光光源光斑的均匀性则取决于激光镜头的好坏。

图11 光纤Fig.11 Optical fiber
图12 激光镜头Fig.12 Lens of laser
整套线阵相机及激光光源在货车装载状态视频监控系统上使用的现场图片如图13,该线阵相机货车装载状态视频监控系统相比之前的LED货车装载状态视频监控系统具备以下优势:

图13 线路上安装的线阵相机及补偿光源Fig.13 Linear-array camera and laser light source installed on the line
(1)具备良好的抗光干扰能力;
(2)避免信号干扰引起的丢图、窜图现象;
(3)在恶劣天气等环境因素下,具备较强的抗干扰能力;
(4)行车方向采集的图片实现无缝拼接,保证采集信息的完整性与连贯性。
3 系统控制方案
针对线阵相机及光源,行车方向图片无缝拼接采用如图14所示的控制方案。前端控制箱在接收到磁钢信号以后计算出列车的行驶速度以及轴距信息,接着通过串口发送给采集计算机。采集计算机1不仅作为车号信息采集模块,还包含内置计量等算法的控制程序,不断将外围设备的控制信号通过串口发送给前端控制箱。所有采集计算机之间通过交换机进行互联通信,并经由交换机传输计量和图像信息至后端服务器。
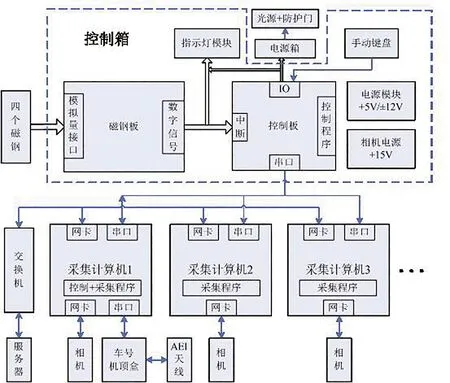
图14 货车装载状态视频监控系统控制方案Fig.14 The truck loading status video surveillance system control scheme
当货车碾压过1号和2号磁钢时,前端控制箱通过串口给采集计算机1发送开启命令,并实时发送轴距信息,采集计算机1通过程序计算、判别车型及确定系统接车后,通过串口将开始接车信号反馈给前端控制箱,以及通过网络分发给各台采集计算机开始接车信号,此时前端控制箱开启防护门和激光程序,各台采集计算机上的采集程序开启相机并等待列车压过3号和4号磁钢时开始对列车进行图像拍摄[2]。
当列车通过以后,前端控制箱关闭激光光源和防护门,并向各台计算机发送过车结束信号,采集计算机在接收到信号后关闭采集程序,并将所有信息上传至后端服务器。至此,一次过车拍摄结束,系统回归待机状态。
4 总结
将线阵相机及激光光源引入到货车装载状态视频监控系统中,是对货车装载状态视频监控系统一次大胆的技术尝试,从现场的运用情况来看,由于实现了列车运行方向上图片的无缝拼接,极大地减少了列检作业人员的工作量,且线阵图像更方便图像故障自动识别的开展。整套线阵货车装载状态视频监控系统由于相机和光源的特点,采用了完全不同以往的轨边机械结构,维护简单、可靠性高,极大地简化了检修人员的轨边作业。但从侧面拍摄的图片看,由于侧面线阵相机安装位置偏低,从而导致图像下半部分出现图像变形。
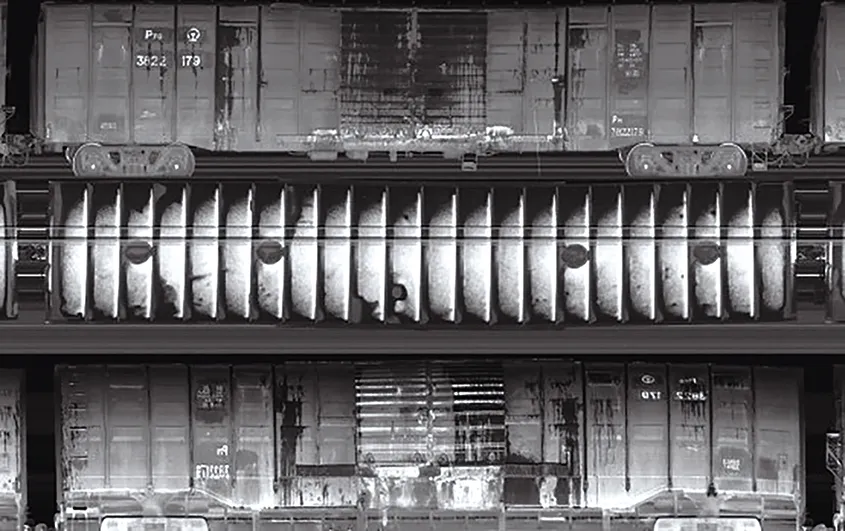
图15 现场采集的一辆货车照片(含顶部、左右两侧)Fig.15 Photos of a truck collected at the scene (including top,left and right sides)

图16 货车车门锁放大照Fig.16 Enlarged picture of truck door lock
