时滞非线性参数系统有限时间状态约束控制
2021-10-20刘文慧
金 璇,刘文慧
(南京师范大学南瑞电气与自动化学院,江苏 南京 210023)
近年来非线性系统的控制问题引起了广泛的关注,许多有效的控制方法陆续被提出,例如滑模控制[1]、模糊控制[2]、鲁棒控制和自适应控制[3-6]. 自适应反步控制法[7-8]可以根据系统本身的状态,构造保证系统存在不确定性时仍具有强鲁棒性的结构,因此被广泛用于稳定非线性系统[9-11]. 众所周知,参数不确定的非线性自适应控制也是非线性控制设计中的热点问题,自适应反步技术被广泛用来解决不确定非线性系统的控制问题[12-15]. 然而参数化非线性系统状态约束和有限时间控制问题鲜有研究.
工业实际应用中存在各种各样的物理条件约束,例如机械臂系统中位置和速度的限制[16],连续搅拌釜反应器中温度和压力的限制[17]等,系统状态约束成为一个具有挑战性的热点问题. 近来,构造Barrier Lyapunov函数使系统状态被约束在给定区域内的方法得到大量应用[18-19]. 另一方面,不同于渐近稳定理论,有限时间稳定能够保证系统内的变量在有限时间内快速收敛于平衡点,使系统拥有更好的瞬态特性. 对于大多数工程应用,需要系统在有限时间内达到期望性能,因此有限时间控制格外重要. 近年,有限时间控制问题取得了巨大的进展,许多新的控制方法应运而生[20-21].
由于测量和计算等的延迟,输入时滞现象常见于化工生产、生物反应器等工业生产中,因此许多研究输入时滞的文献应运而生[22-24]. 然而研究全状态约束系统的输入时滞问题的文献还比较少. 在此基础上,本文研究了具有输入时滞不确定非线性系统的有限时间全状态约束跟踪控制问题. 设计过程中利用Barrier Lyapunov函数和pade近似法解决了状态约束和输入时滞问题,再利用反步控制技术和有限时间控制方法设计了一个新的自适应控制器. 本文主要贡献为:
(1)在有限时间控制系统中引入全状态约束并在反步设计过程中使用Barrier Lyapunov函数使系统内所有的状态都不超过给定的范围;
(2)在全状态约束非线性系统中考虑了输入时滞并使用pade近似法解决其对系统性能的负面影响;
(3)在系统含有未知参数时,会给系统带来性能的恶化甚至导致系统不稳定. 为了消除其负面影响,需要应用新的自适应控制方法,这给控制器的设计带来困难. 而本文在控制器设计过程中,根据控制结果所需为系统的未知参数设计了合适的自适应律,再利用自适应反步技术为参数化非线性系统设计了新的有限时间自适应跟踪控制器,使闭环系统内的所有信号能在有限时间内有界,同时输出信号追踪给定参考信号的追踪误差很小.
1 问题描述
考虑如下参数化非线性严格反馈系统
(1)

为对系统(1)进行跟踪控制器设计和稳定性分析,需要做出如下假设并且使用如下引理.

假设2存在常数ρi>0是外部扰动di的上界,即|di|≤ρi.


本文的控制目标是设计一个有限时间跟踪控制器,保证系统的输出y(t)能够跟踪给定的参考信号yr(t),保证所有状态不超过给定的范围且闭环系统中的所有信号在有限时间内有界.
2 跟踪控制器设计与稳定性分析
我们运用自适应反步技术和有限时间控制理论针对系统(1)进行跟踪控制器设计,再使用李雅普诺夫分析法进行系统的稳定性分析.
2.1 跟踪控制器设计
这一部分利用自适应反步法进行控制器设计,设计过程分为n步. 为了处理带有时滞的输入项u(t-τ),本文引入pade近似法[28],系统(1)可重新表示为
(2)
式中,γ是待设计参数,xn+1是增加的中间变量.
首先进行如下坐标变换
(3)
式中,e1是跟踪误差,vi-1和vn-1是待设计的虚拟控制器.
第1步:对跟踪误差e1=x1-yr求导得
(4)
构建如下含有Barrier函数的Lyapunov函数:
(5)

(6)
设计虚拟控制器为:
(7)
代入式(6)中得到:
(8)
根据Young不等式,得到:
(9)
(10)
令自适应律为
(11)
则得到不等式:
(12)
式中,φr,1(x1)=φ1(x1).

(13)
根据不等式(9)、(10)、(12)和(13),式(8)可以重写为
(14)

(15)

注1在设计Lyapunov函数时加入了Barrier函数,使状态x1被限定在预定范围内. 在接下来的步骤中,我们用了同样的方法来确保状态约束能够满足.

(16)
式中


与第1步相似,构造如下Lyapunov函数:
(17)

(18)
设计虚拟控制器和自适应律为
(19)
(20)
式中,μi>0(i=1,2,…,n)是待设计参数.
(21)
根据第1步中的步骤可得:
(22)


采用离散余弦变换(Discrete Cosine Transform,DCT)求解,将解缠过程转换为采用DCT求解泊松方程的问题,即可恢复InSAR真实相位.
(23)


(24)
式中
设计实际控制器和自适应律为
(25)
(26)
2.2 稳定性分析
本节给出以下定理来说明本文的主要结果. 如下文所示是有限时间稳定的证明.
定理1对于具有输入时滞、有界外部干扰和全状态约束的的严格反馈参数化非线性系统(1),如果在假设1和假设2下使用控制器(25),则该闭环系统是半全局有限时间稳定的.
证明设计如下Lyapunov函数:
(27)
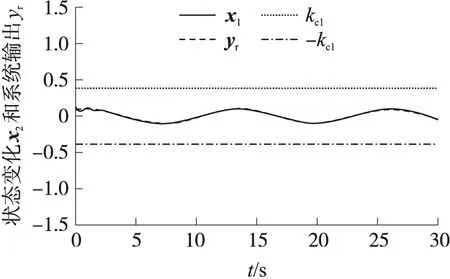
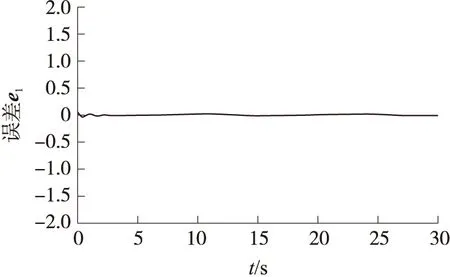
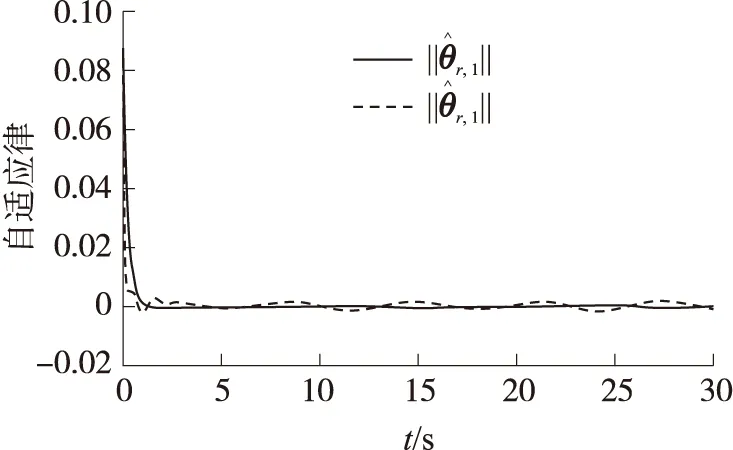
式中,kbn之后会给出. 在集合Ωen={en:|en| (28) 类似于之前的步骤,将实际控制器u和自适应律代入可以得到: (29) 定义V=V1+V2+…+Vn且应用引理3得到: (30) 所以根据引理1,可以得到系统(1)是半全局有限时间稳定. 注2根据以上证明,显然|x1|≤|e1|+|yr(t)| 考虑如下非线性系统: (31) 式中,u和y是系统的输入和输出,θ1和θ2是未知常数向量. 在仿真中选择θ1=0.1,θ2=[0.2,1]T,外部扰动为d1=0.02cos(0.5t),d2=0.06sin(t+0.25),输入延迟选择为τ=0.1. 仿真结果如图1-图4所示. 图1表示系统输出信号y与跟踪信号yr的轨迹,图2表示跟踪误差e1的仿真结果. 由图1和图2可以看出系统跟踪性能良好且系统状态x1不超出预定界限. 图3表示系统状态x2保持在预定界限内. 图4表明自适应律是有界的. 以上结果都证明本文提出的新的跟踪控制器能够在有限时间内使系统达到预期. 图1 y(t)和yr(t)的轨迹Fig.1 Trajectories of y(t)and yr(t) 图2 误差e1的轨迹Fig.2 Trajectory of error e1 图3 x2(t)的轨迹Fig.3 Trajectory of x2(t) 图4 自适应律和的轨迹Fig.4 Trajectories of adaptive laws 本文针对具有输入时滞、有界外部干扰和全状态约束参数化非线性系统设计了一种新的有限时间自适应追踪控制器. 为了消除输入迟滞的影响,使用了pade近似法. 应用一些的引理确保系统能在有限时间内达到预期效果. 此外,利用自适应反步技术和Barrier Lyapunov函数推导出自适应控制器使系统输出信号追踪给定参考信号并保证系统状态被约束在给定区域内且保证系统所有信号都在有限时间内有界. 最后,通过仿真实例验证了本文提出的控制器的有效性.


3 仿真算例


4 结论
