消费型倾斜无人机技术在旧城区改造的应用
2021-10-20何永钟
刘 静 何永钟
(广东联合金地不动产评估勘测设计有限公司, 广东 韶关 512026)
0 引言
随着城市快速发展,老城区内的旧建筑物急需改造翻新,依据城市发展理念改造翻新的建筑物需同时考虑建筑物外形设计的合理性以及与周边建筑物的协调性。利用构建的实景三维数字模型,在建筑物方案设计时能够帮助设计师全面考虑整个区域的整体建筑结构特点、设计与之协调的建筑物[1]。通过近年发展成熟的消费型倾斜无人机技术,快速获取多视序列影像数据,结合数据处理平台能够准确地构建实景三维模型,真实展现建筑物整体外观结构、相对位置关系,提高三维模型构建效率、缩短项目周期、节约人力成本[2]。
旧城区的平房密度较大、使用年限久、交通不便利,而且存在违建和“钉子户”情况,这给旧城区建设情况的调查、城镇实景三维模型构建带来了挑战[3]。常规城市调绘以实地外业勘察为主,手段相对比较单一,外业劳动量大、成本高且易出错。勘察采用的测量成果数据现实性较差,通常为卫星影像或航拍数据分辨率不高,容易受天气影响[4]。航空航天遥感数据,难以采集建筑物的侧面纹理信息,成果难以用于外业调查使用。消费型倾斜无人机摄影测量技术作为新兴的测图方法,在不动产登记工程[5]、交通勘察规划[6]、城镇建设规划[7]等方面得到广泛的应用。
本文首先详细介绍消费型倾斜无人机摄影测量系统与倾斜摄影测量涉及的关键技术,然后探讨消费型无人机在旧城改造三维重建工程上的应用,最后对构建的三维模型进行精度验证。
1 倾斜无人机助力旧城改造技术路线
1.1 数据采集系统
无人机倾斜摄影测量系统由高精度位置与姿态测量系统(Position and Orientation System, POS)、时间同步装置与多镜头设备组成。通过对测区范围内的旧城地物、地貌进行拍摄获取多视序列影像,利用成熟的倾斜摄影测量数据处理系统构建实景三维模型,提取所感兴趣的信息并实时分析。无人机倾斜摄影测量系统具有机动性高、成本低、操作简单等优点,通过获取的多视序列高分辨率倾斜航测数据,能够快速生成数字表面模型、数字地面模型以及实景三维模型等。
1.2 倾斜摄影测量关键技术
利用倾斜摄影测量系统获取多视影像数据,包括垂直数据、多方向的倾斜数据。倾斜摄影测量的关键技术主要为多视影像区域网平差、多视密集匹配、实景模型处理技术。
1.2.1多视影像区域网平差
倾斜摄影测量系统能够同时获取多个方向影像数据,每个镜头存在较大的视角差别以及旧城区地理环境复杂,导致获取的影像数据间存在较大的几何变形和阴影现象,仅利用专业的摄影测量软件难以有效地进行多视角影像处理,需要人机交互处理多视影像数据。通过POS系统可以获取多视影像数据初始定位、定姿数据,采用由粗到细的匹配策略对多视影像进行匹配,获取多视影像的多度重叠同名点,利用多种约束策略剔除误匹配点,确保匹配同名点的定位精度。采用全球定位系统(Global Positioning System,GPS)辅助光束法平差方法建立多镜头影像数据区域网的误差方程,利用最小二乘算法解算加密点物方坐标以及每张影像精确的定位、定姿参数[8]。针对倾斜摄影测量系统获取多视倾斜数据特点,采用曝光延迟补偿的光束法区域网平差方法弥补相机曝光时刻无人机飞行速度难以保障匀速的问题[9]。当前采用自动化的倾斜影像空三解算方案,在平差处理过程中通过解算定位、定姿参数时计算像点误差,通过人机交互的方式剔除误差较大的点,迭代计算影像的定位、定姿参数。
1.2.2多视密集匹配
经过空三处理获取多视影像精确的定位、定姿数据,利用多视影像密集匹配方法构建实景三维模型。多视影像密集匹配处理恢复复杂场景表面的三维点云数据,能够真实表达场景下的完整信息与局部细节信息。虽然激光扫描获取点云数据与多视影像密集匹配获取点云功能相似,但目前激光扫描设备存在价格昂贵、缺乏纹理信息且获取点云数据量较大等问题[10]。常用的多视影像密集匹配方法主要包括半全局匹配、基于面片的密集匹配[11]。半全局密集匹配方法进行密集匹配时采用矩形窗口的低代价影像聚合,最大优点是计算数据量小、适当的数据冗余量,算法复杂度相对较低;但极易陷入局部最优的计算情况导致阴影、水系以及植被等弱纹理区域匹配完整度较差情况。另一种基于面片的匹配方法主要是对多视影像数据中影像像素信息进行实时综合分析匹配,该方法能有效地避免弱纹理区域匹配失败问题,匹配结果较好、精度高,但匹配效率较低、工作量大。目前在倾斜无人机多视影像三维重建中应用最为广泛的为三维多视角立体视觉算法,在算法中通过引入并行计算优化计算效率,依据场景选择参数值和重建测量,加入空间约束与自适应扩展方式,提升算法的运算效率与应用场景[12]。
用无人机搭载的高精度相机,对建筑物从垂直、前视、后视、左视、右视五个角度进行拍摄。摄像同时记录巡航高度、曝光时间、经纬度坐标、大地高、飞行姿态等信息,为后续的数据处理提供信息。利用Context Capture软件对多视倾斜影像数据进行自动化构建旧城区实景三维模型的主要技术流程见图1。
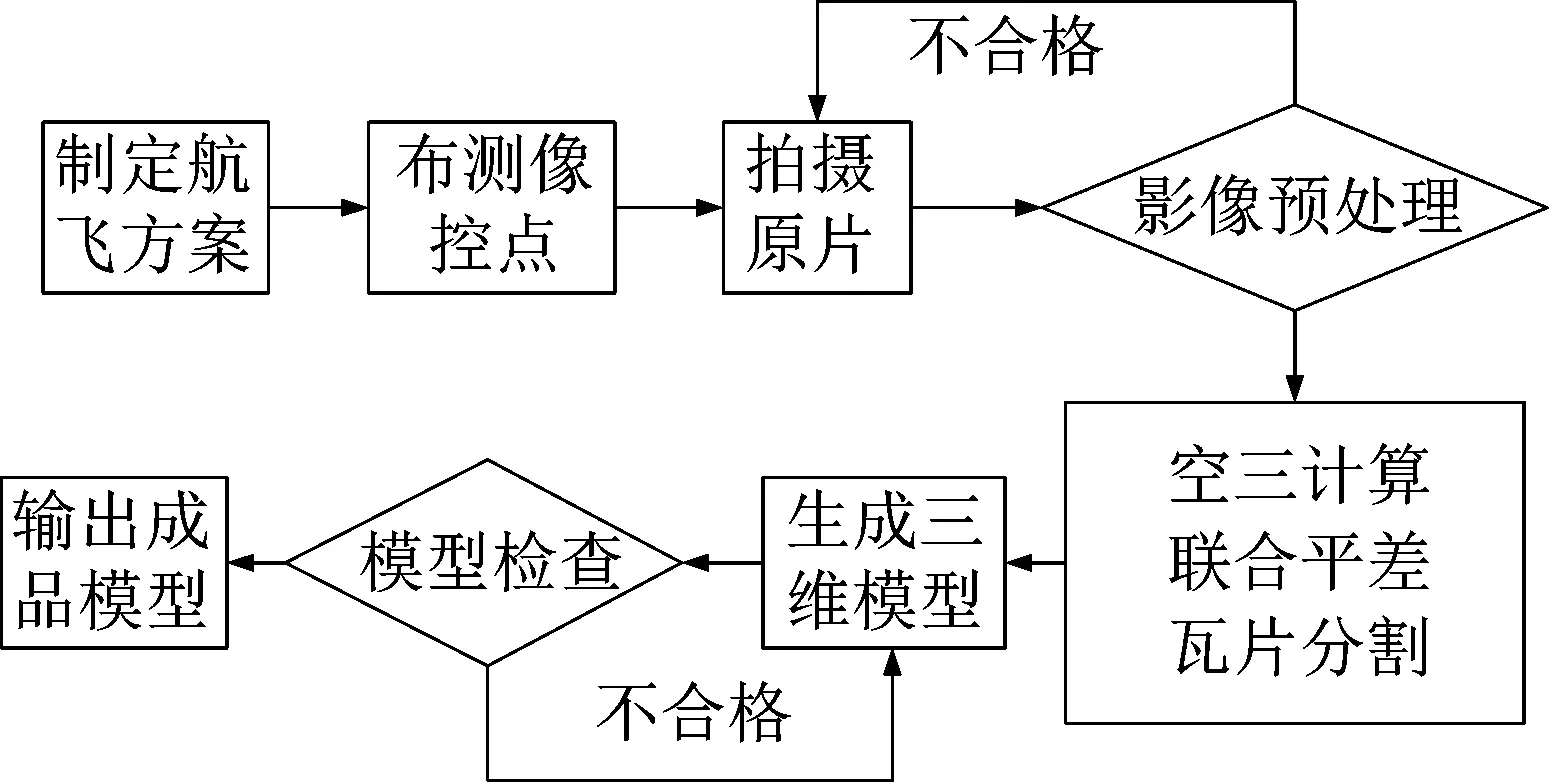
图1 实景三维模型构建技术流程图
1.3 实景模型处理
针对旧城改造翻新过程中需要重新设计建筑物或改造部分建筑物的侧面问题,将实景三维模型中部分建筑物删除并将设计好的建筑物替换上,评价整体区域的协调性。常用的剔除替换主要有切割法、矢量法,切割法采用待切割物体对应的矢量面信息,切割倾斜多视序列影像数据构建的三维模型,通过对序列三角片网的切割实现建筑物模型的单体化生成。矢量法将相同场景的实景三维模型与二维矢量数据叠加,渲染三维模型表面的对象,通过对矢量面透明度与颜色的设置,实现单体模型的突出显示选中。由于矢量法单体化方法仅能选中突出渲染的对象,难以满足单体物体的分离,因此,采用切割方法对生成的实景三维模型进行单体化切割处理。利用成熟的CityMaker 软件,将单体模型从实景三维模型切割出来,对需要替换的单体化建筑物进行剔除处理。依据待切割实景三维模型数据量测出建筑物的角点坐标,依次串联生成对应的矢量数据信息,完成特定建筑物单体化模型的删除。该方法对实景三维模型进行垂直方向的切割处理,为保证切割出的单体模型的完整性在切割建筑物时需要确保包括屋檐、阳台等建筑物突出部分信息。依据上述矢量信息,将新建的建筑物设计三维模型植入到整体实景三维模型内,完成单体建筑物模型的替换更新。
2 倾斜摄影技术在旧城改造工程应用分析
在旧城改造设计阶段,需获取整个旧城区整体建筑物结构、风格等方面信息。采用谷歌影像无法获取旧城区建筑物的高度,若采用纯野外的测量或拍摄的方式获取建筑物的高度,作业效率低,难以满足精度与质量的保证。故采用消费型倾斜无人机摄影测量技术获取多视序列无人机影像构建实景三维模型,通过在实景三维模型上量测建筑物的高度测量、尺寸以及更新面积的预测等相关工作,避免外业测量工作的增加;通过将新设计的模型引入到实景三维模型中,实现设计与现实的整体对比。
2.1 多视倾斜影像数据采集
采用大疆公司的Phantom 4 Pro四旋翼无人机平台搭载标配相机,通过多次不同航高的飞行获取多视影像数据,生成分辨为0.05 m的多视影像数据,消费型倾斜无人机系统的具体参数如表1所示。
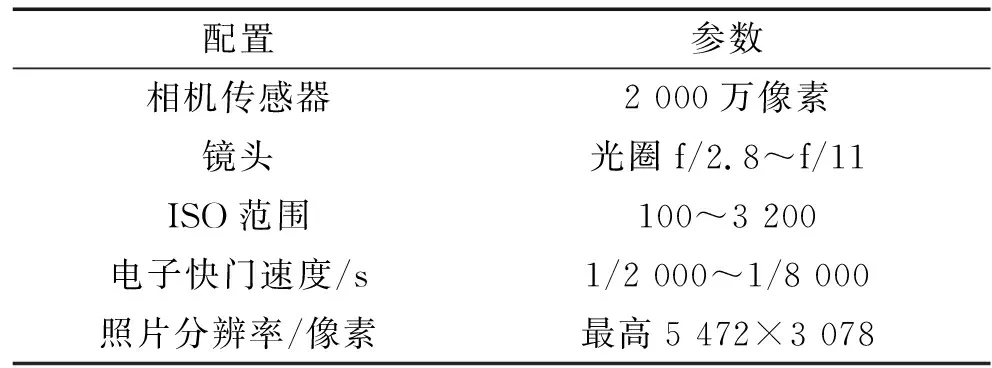
表1 无人机相机参数
依据旧城区不同建筑物的高度,将整个测区的相对航高控制在100~200 m之间。对建筑物高差较大的区域采用1~2层的航高飞行,体育场特殊区域设置为3层航高,采集多视序列影像数据。为了保证生成实景三维模型的精细化程度,从建筑物左、右、前、后、下等五个方向分别获取多视序列影像。为保证生成实景三维模型精度,旁向重叠度与航向重叠率分别控制在70%、80%左右。为了保证整个测区内飞行高度稳定不变,将整个大的测区划分为五个子区域(图2),各子区域参数如表2所示。
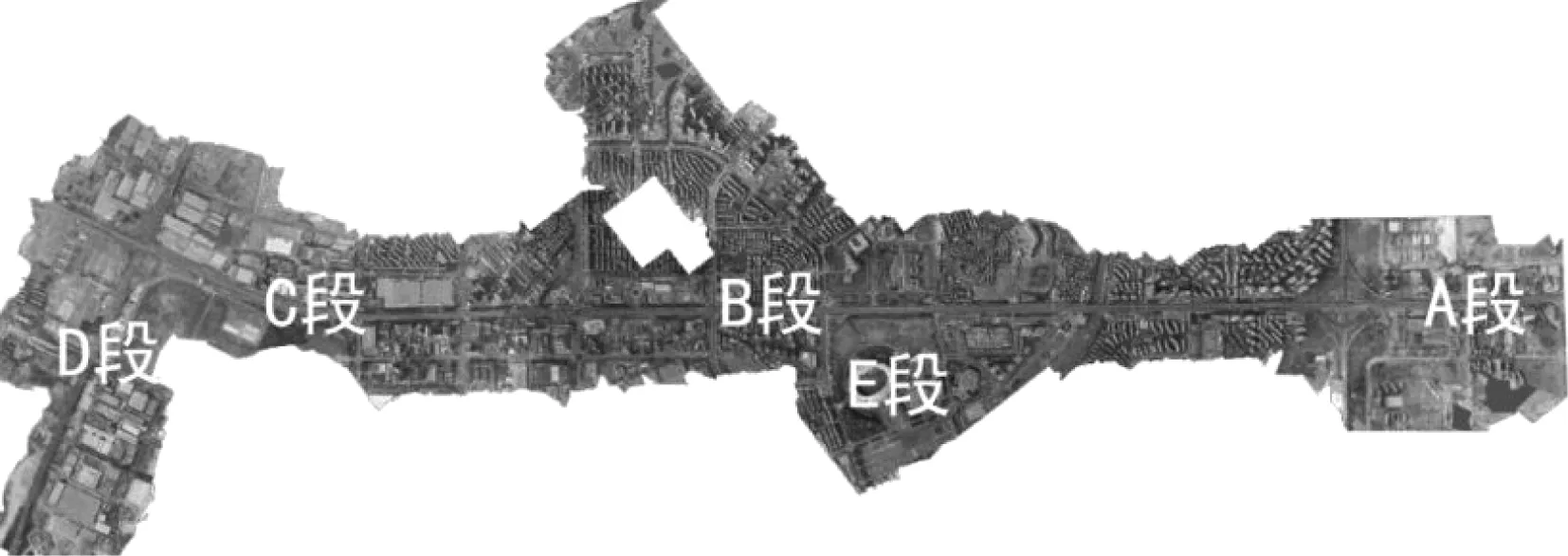
图2 实验区域旧城区全景图
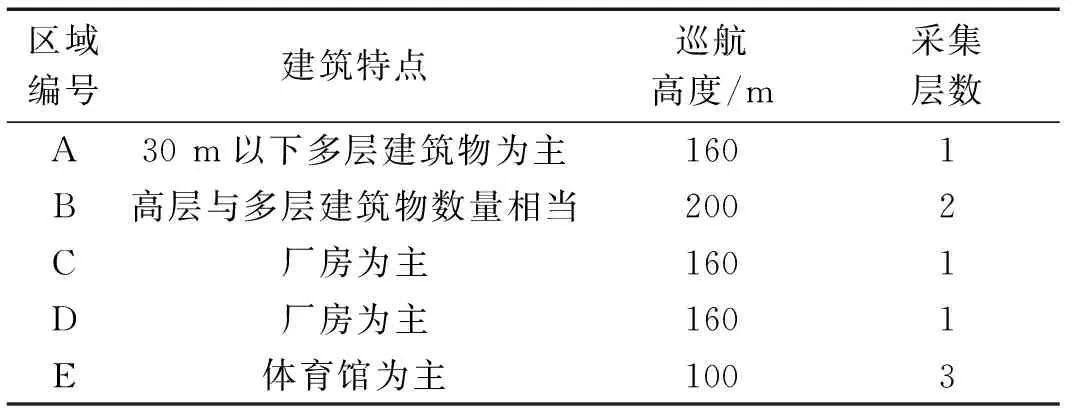
表2 航线设计
2.2 实景三维构建数据处理
多视倾斜影像数据处理采用Context Capture 软件,利用多视影像的POS数据将多视影像数据进行水平纠正处理,消除不同视角间影像的几何变形,然后利用尺度不变特征变换算法提取多视影像数据的初始同名点坐标,为了保证同名点正确率,采用随机抽样一致算法剔除同名点中存在的明显错误点。利用剩余的同名点对进行同名点引导的约束匹配,提高同名点的数量与正确性,最后采用最小二乘匹配算法提高同名点的定位精度。为了避免无人机在相机曝光时刻飞行速度不均匀问题,引入曝光延迟的GPS辅助光束法区域网平差方法,通过将各曝光瞬间位置偏移参数与曝光延迟时间作为未知参数统一解答,对各个曝光点的曝光延迟误差进行逐点曝光补偿,减弱因相机曝光不一致引入的曝光延迟误差,提高GPS辅助光束法区域网平差的整体精度。
旧城区的实景三维建模生产过程使用天工软件空三处理的成果作为主要的输入数据。由于旧城区内建筑物密集、整体区域较大,三维模型构建的计算量相对比较大,采用以格网为基本处理单元,进行点云数据与纹理影像的自动映射处理,生成旧城区的实景三维模型。由于篇幅限制本文以该范围内一栋6层高酒店为例,生成稀疏点云、不规则三角网、建筑物白模以及实景三维模型如图3所示。通过对酒店及其周边区域的全景和细节进行检查,区域内不存在较大结构缺失和变形现象,生成的建筑物整体结构模型效果较好。
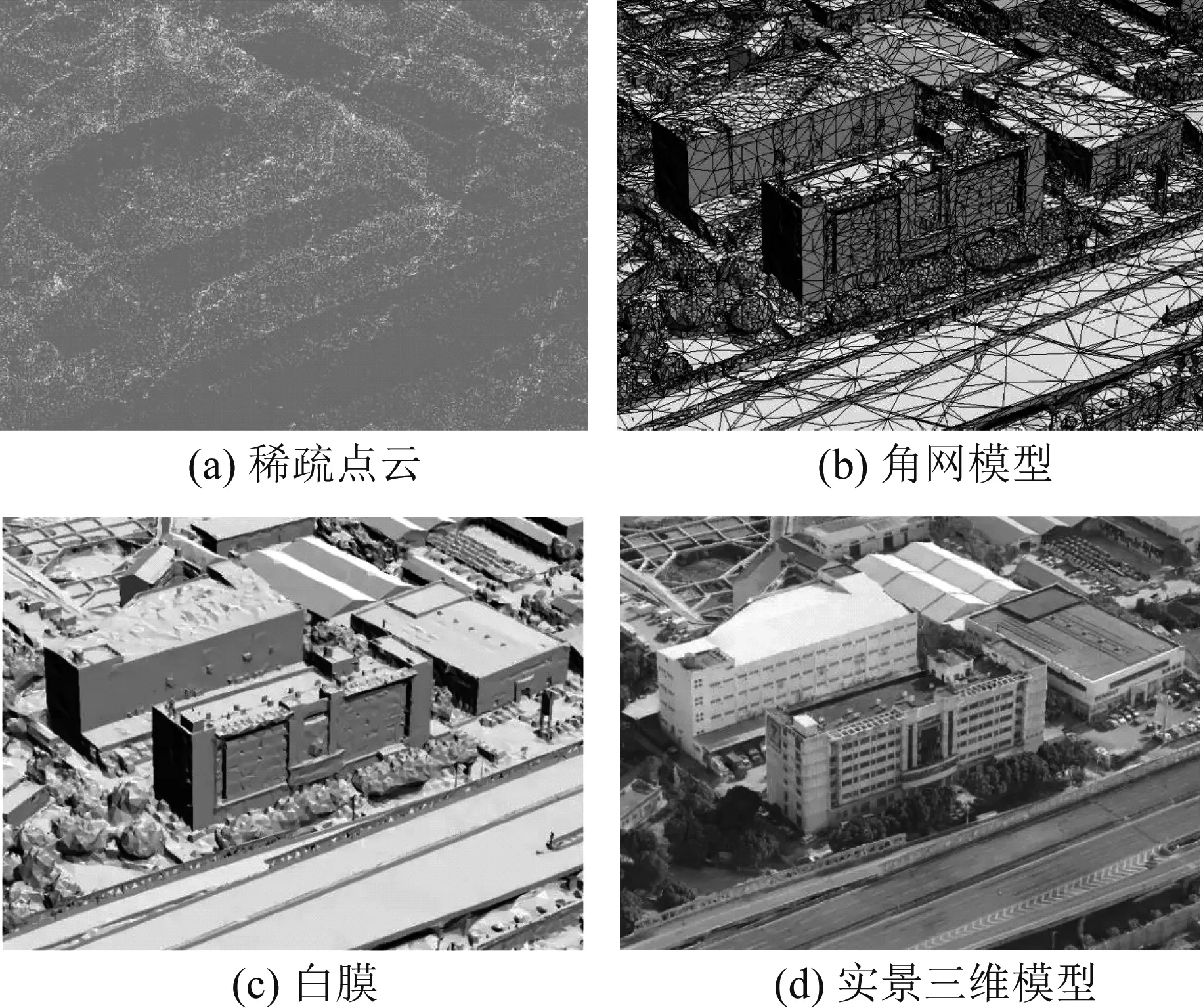
图3 实景三维模型
2.3 模型精度分析
通过外业均匀采集10个控制点坐标与在实景三维模型上量测的模型点坐标进行对比分析,确定本文方法构建实景三维模型的精度。通过比较实际测量值和模型上量测的值计算获取平面与高程方向的中误差。由表3可知,获取实景三维的平面中误差和高程中误差,最终评定整个测区的实景三维模型的整体精度。其中,Δx、Δy、Δz分别表示实际测量值和模型上量测的值计算差。计算可知:平面x方向最大误差0.036 m,最小误差为0.012 m,平面y方向最大误差0.031 m,最小误差为0.014 m,高程方向最大误差0.028 m,最小误差为0.011 m,平面中误差为0.027 7 m,高程中误差为0.022 2 m。依据《三维数字地图技术规范》(DB33T 934-2014)中1∶500大比例成图规范要求(平面精度优于0.3 m,高程精度优于0.24 m)可知,倾斜多视影像数据构建实景三维模型的精度满足1∶500大比例尺平面与高程测量精度要求。
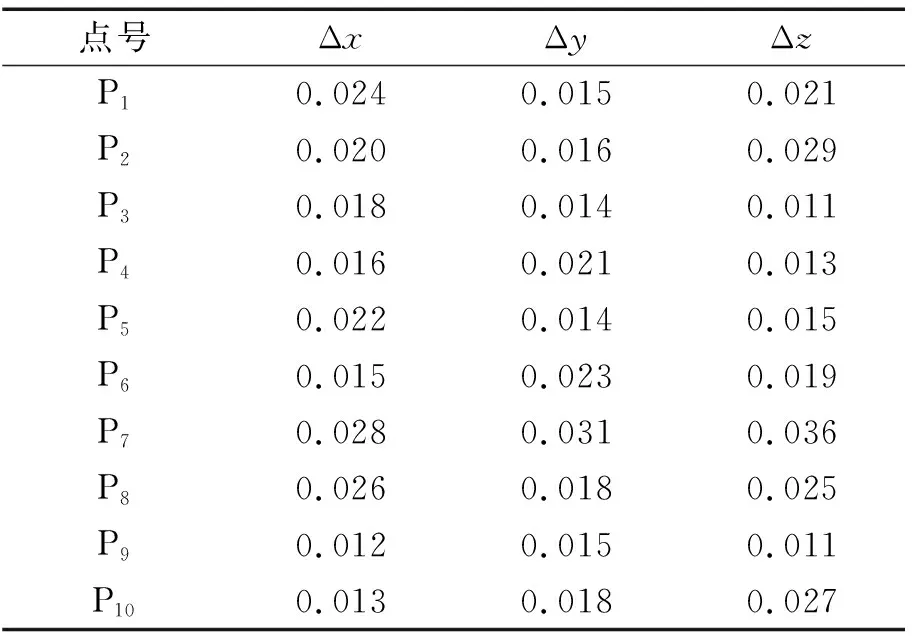
表3 检查点误差统计表 单位:m
3 结束语
采用无人机倾斜摄影测量系统获取多视影像数据,对旧城区进行立体测绘,通过倾斜摄影测量技术创建实景三维模型,利用该模型实现标高量测,建筑尺寸、高度量测,拆迁面积预测算等工作;并通过植入改造后的模型实现现状与设计对比,为后续工作提供设计依据。通过构建的实景三维模型与外业采集的控制点进行精度对比,实验结果表明,生成三维模型精度完全能够满足规范要求,对倾斜无人机摄影测量技术在旧城区改造工程方向的广泛应用提供一种思路。