炮位侦察校射雷达探测模型建模与仿真
2021-10-20戴文瑞
王 锐 戴文瑞 李 俊
(陆军炮兵防空兵学院 合肥 230031)
0 引言
炮位侦察校射雷达作为炮兵作战中必不可少的侦察装备,即可为己方校射弹着点, 也可用于测定敌方火炮阵地位置,目前已有的部分相关雷达模拟训练系统可从功能模拟的角度实现雷达操控台全仿真模拟训练,但模拟训练系统没有进行雷达装备工作原理、侦察及抗干扰性能的仿真模拟,也不能使作战员对雷达机理和性能有更深层次的认识和理解,限制了雷达进一步的战术使用和效能发挥[1-2]。
为有效解决炮位侦察校射雷达在研制和训练中面临的上述难题,本文提出通过仿真构建雷达探测模型,为充分体现在自然环境及复杂电磁干扰环境的前提下,构建一种针对该型雷达探测过程的建模与仿真方法,利用计算机仿真技术的可控制性、可重复性、无破坏性、安全性、经济性等优点,对炮位侦察校射雷达的技术与战术运用等进行仿真与效能评估重现雷达系统的动态工作过程,为雷达的研制与训练工作提供了理论指导,对提高雷达战斗力具有重大意义。
1 炮位侦察校射雷达基本原理及仿真要求
炮位侦察校射雷达波束扫描采用相控阵体制,雷达天线向空中辐射形成的针状波束按照功能分为搜索、确认和跟踪三种波束,主要有两种工作模式:一是对敌方炮位进行侦察; 二是对己方炮弹炸点进行校射[3-4]。雷达进行对敌炮位侦察时,天线辐射波束沿地平线轮廓贴地作向上45°~90°的扇形搜索,若在某一波束位置内有敌方发射的弹丸,它的反射电磁波就被雷达天线阵接收,经雷达接收机放大,信号处理机滤除地物杂波、气象杂波、鸟类杂波、昆虫杂波和地面车辆等慢速运动目标的干扰信号后,如果回波强度达到检测门限,信号处理机则检测出弹丸目标,并向雷达控制计算机报告目标的距离和多普勒滤波器号。计算机根据波束编排的原则,立即向该目标发出确认波束,经确认无误后,启动起始跟踪程序对该目标进行跟踪,直至能够稳定无误地进行跟踪时即转入正常跟踪。在跟踪点的时间间隔内,可安排搜索波束,确认波束,第一、第二、第三、……个目标的跟踪波束,雷达取得监视空域内的各弹丸轨道数据后,可根据这一段弹道以反向外推法计算出弹丸的发射点,即敌炮阵地坐标。
在校射模式下,雷达波束搜索己方弹丸,在弹道的降弧段对弹丸进行跟踪,其轨道的建立、平滑滤波、计算机外推和高程修正都与对敌工作方式相同,只是计算机沿着弹道轨迹作正向外推算出己方弹丸在预先设置的低基准面的弹着点坐标并进行高程修正,从而得出精确的地面坐标,供己方炮兵修正射击诸元用。
根据炮位侦察校射雷达的工作原理,对其建模仿真主要有以下几点要求:
1)要素齐全的作战环境模拟。包括能够模拟敌我双方的炮位及相应弹道,大气等自然条件和复杂电磁干扰环境等。
2)调度合理的波束资源管理。炮位侦察校射雷达面临多种作战任务,波束需要同时进行搜索、确认和跟踪,根据作战任务的紧迫程度,需要合理地分配波束资源方案。
3)过程完整的雷达工作流程。为加强训练的针对性和深度,全过程采用相参信号仿真,加深对理论理解。
2 炮位侦察校射雷达侦察模型构建
根据前文所述炮位侦察校射雷达的基本工作原理及建模要求,在充分考虑雷达的性能参数、受干扰情况、自然环境等因素,完整地模拟雷达对当前战场空间内作战目标的探测及数据生成过程,本文将炮位侦察校射雷达模型构建流程[5-6]分为如下过程。
首先,炮弹目标经过目标过滤,主要包括弹道诸元计算、预处理、门限检查、视场检查和地形遮蔽检查等操作;然后,进行波束资源管理。主要包括跟踪波束、待确认波束及搜索目标波束分配等步骤;随后,进行接收机模拟和天线模拟,充分考虑天线增益损耗;再次,模拟大气降雨等自然环境,进行环境效应模拟,再模拟雷达受干扰效果;接着进行探测判决并进行点迹生成,主要是根据雷达方位和距离分辨率,处理已发现的目标信息,对于方位和距离都在同一分辨率门范围内的目标点迹根据目标能量进行合并,生成探测点迹,并计算点迹质量;最后,进行航迹管理和位置误差计算,维护射击动作列表,进行目标自动禁止处理,递推弹道,形成炮位或炸点情报并上报,完成数据处理器模拟。具体流程如图1所示。
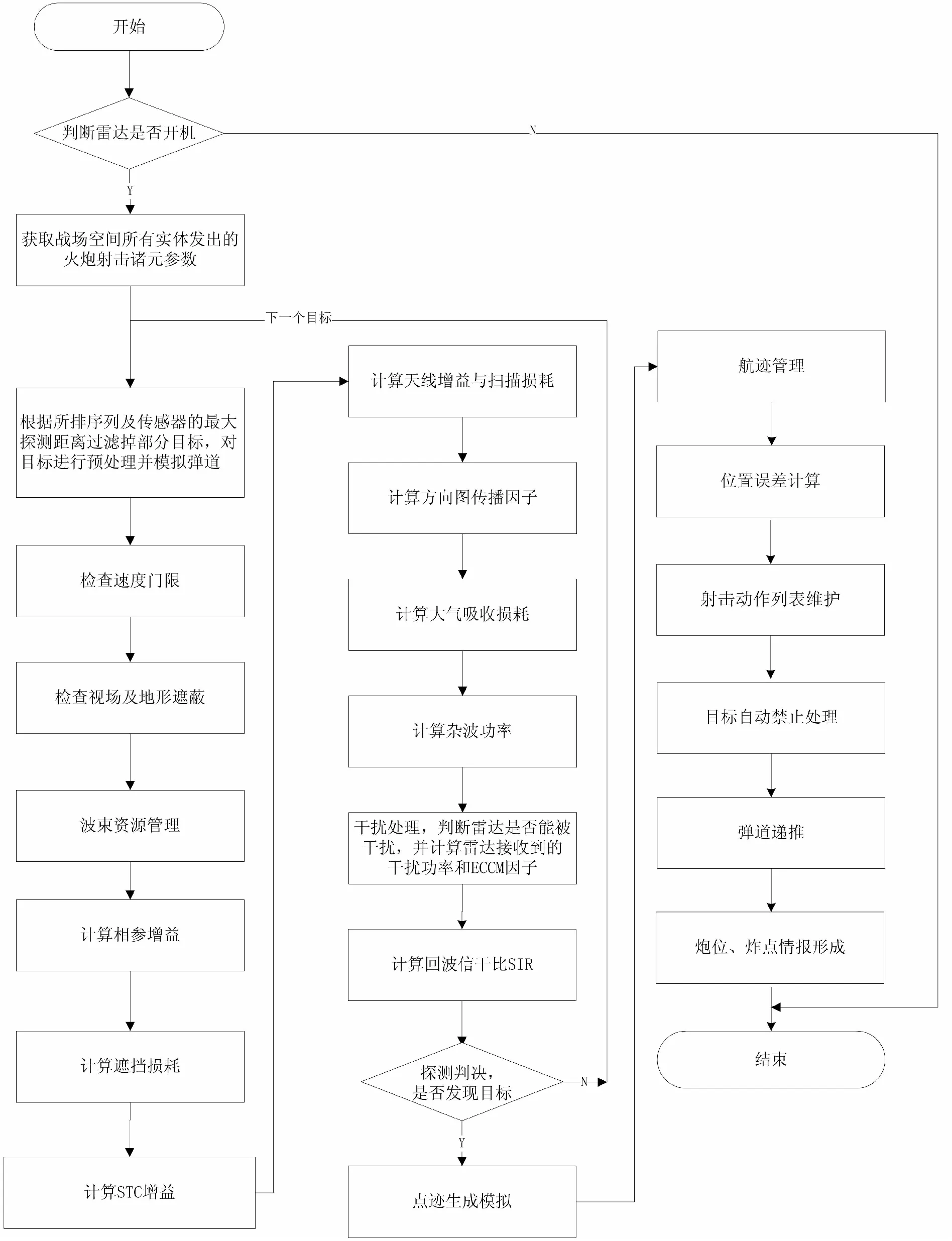
图1 炮位侦察校射雷达模型信息处理流程
3 侦察模型关键技术
3.1 作战环境生成
作战环境生成主要包括弹道模拟、雷达外部环境数据生成等。
3.1.1 弹道模拟
根据火力打击单元输入的射击诸元指令和战情产生软件产生气象数据的风速信息可以计算出炮弹弹道。
计算可得炮弹坐标和目标与雷达距离、方位和高度为
(1)
(2)
其中:R为目标相对雷达距离;{rx,ry,rz}为雷达坐标;{tx,ty,tz}为目标坐标;α为目标相对雷达方位角;θ为目标相对雷达俯仰角;ha为雷达高度,ht为目标高度,单位均为m。
3.1.2 雷达环境特性模块
1)干扰信号,主要考虑压制干扰
根据雷达方程和雷达的体制特点,在对目标回波信号进行模拟时,可以简单地将目标看作是点目标,回波因子的计算公式为
(3)

2)大气误差
根据大气衰减系数和降雨速度等,计算大气吸收损耗La。
计算公式为
La=10LdB/20
(4)
LdB=kaRE(1-eR/RE)+rkRR
(5)
RE=3/sin(φc)
(6)
(7)
其中:ka为标准大气衰减系数(标准单位);kR为气象系数(标准单位),根据瑞利散射理论,ka和kR与雷达频段存在对应关系,可直接查找相关频率对照表得到数值;φt为目标仰角;r为降雨速率;R为目标与雷达距离。
3)雨杂波
炮位侦察校射雷达所受到的主要杂波是空中的雨杂波,其杂波功率计算为
(8)
其中:K1为常数;Pt为发射功率;r为降雨速率;Lp为极化损失。
3.2 波束资源分配
雷达探测模型主要负责对目标进行探测,包括波束管理和数据处理。
波束资源管理的功能主要是根据目标的特点,动态分配相控阵雷达的波束资源。相控阵雷达在一段时间内总的能量是固定的,该段时间内所有跟踪目标、待确认及被搜索目标各自获得的能量可以不同,但能量总和不变。主要考虑波束资源、作战任务、资源调度和管理流程等因素,具体波束资源分配的流程如图2所示。

图2 波束资源分配流程图
3.3 炮位侦察校射数据处理
为形成稳定的目标航迹,并进行多目标跟踪。炮位侦察校射雷达的数据处理模块的处理流程如图3所示。主要包括射击动作列表维护、目标自动禁止处理和弹道外推[7]。

图3 数据处理流程图
1)射击动作列表维护
射击动作列表维护模块主要按照时刻将炮弹射击后的动作列表转换为炮弹的空间位置填入目标链表中。判断雷达处于炮位侦察模式还是校射模式。如果雷达处于炮位侦察模式,再判断炮弹处于上升段还是下降段,如果炮弹处在上升段,进行弹道递推计算和弹道列表维护。反之,如果炮弹处在下降段,则清除弹道,流程结束。如果雷达处于校射模式,再判断炮弹处于上升段还是下降段,如果炮弹处在下降段,进行弹道递推计算和弹道列表维护。反之,如果炮弹处在上升段,清除弹道,流程结束。
2)目标自动禁止处理
当处于炮位侦察模式时,需要进行自动禁止处理,主要是防止发射炮弹过多导致雷达饱和,自动禁止处理主要为在对跟踪的一组数据进行轨道计算后,将该轨道同已有的弹道轨道进行比较,当某已存在的炮阵地位置同该轨道算出的炮阵地距离小于一定的值且处理次数较多时,说明所发现的目标可能是已确认的阵地发射的,则所算出的轨道丢弃,不再进行弹道递推。
3)弹道外推
弹道外推模块在侦察模式时,如果雷达没有自动禁止处理,当弹道点数大于5点时,可以根据得到的弹道点推算炮阵地位置。在校射模式时,当弹道点数大于5点时,可根据弹道点迹推算出炮弹落点。
为了得到外推数据,需要对弹道点数据进行最小二乘拟合,以侦察模式为例,先将弹道点投影至地面坐标系水平面xoy,假设这些投影点大致接近一条直线,认为该直线为拟合弹道在地面的投影,将该直线方程设为
y=ax+b
(9)
根据最小二乘理论,得到
(10)
式(10)中n为弹道点数,为使M值最小,将式(10)分别对a、b取偏微分得到
(11)
根据式(11)可求出常数a、b,从而确定直线方程。
将弹道点投影至拟合弹道面(即前面所求直线方程所在面,该面垂直于地面)。按照上面介绍的方法确定在弹道面中的拟合弹道抛物线方程,为分析问题的方便可直接在平面坐标系中分析确定炮位,按照同样的方法可确定炸点。
4 软件仿真
炮位侦察校射雷达仿真软件采用VC++ 6.0进行编程,利用VC++的文档/视图框架结构,从而便于整个软件的管理和维护。其中仿真运行支撑平台负责炮位侦察校射雷达仿真软件子模型调用,此外仿真运行支撑平台还负责子模型间的信息交互,如果进行分布式仿真,则具有计算机网络初始化的功能。仿真后运行的总体效果如图4所示。该图为软件运行想定后界面,界面左上方为软件生成雷达实体列表,右上方显示雷达1在地图上的位置,显示界面左下方显示雷达情报和雷达工作状态,界面右下方通过B显方式显示火力单元阵地坐标。

图4 软件仿真结果显示
5 结束语
本文对炮位侦察校射雷达的探测流程进行了系统建模,在分布式仿真框架上进行了软件开发,软件具备较高扩展性。建模理论科学合理、仿真结果可靠,为部队开展雷达训练提供了一种新的途径。