某型链式炮供弹机构设计及动力学分析
2021-10-19高云峰满孝杰
高云峰,王 刚,满孝杰,成 晨
(中北大学机电工程学院,山西 太原 030051)
随着科技的不断发展,现代战争已经发展为多维空间的全方位、全天候战争。相比传统陆地作战模式,水下作战具有更高的未知性和复杂性,对作战人员及相应武器的要求也更高。
供弹机构是自动武器的重要组成部分,其复杂程度在自动武器所有结构中最高,发生故障的概率也最大。供弹机构的主要功能是将容弹具中的弹药快速、平稳且精确地输送到自动机里,以确保自动武器能够保持正常工作[1-4]。因此,设计一种可靠的供弹机构对提高自动武器射速及保障武器正常工作具有重要意义。
本文在深入分析国内外现状的基础上,借鉴相关学者对链式自动原理及反蛙人武器的研究成果,基于武器系统整体设计的要求和指导,进行某型链式炮的供弹结构设计,并利用ADAMS对虚拟样机进行动力学仿真研究。
1 供弹机构方案设计
1.1 供弹机构三维模型
为提高容弹量并降低系统故障概率,链式炮采用弹链供弹。供弹机构的主要部件有弹链、输弹组件、进弹组件、脱弹组件、受弹器等,其结构如图1所示。

1—弹链;2—输弹组件;3—进弹组件;4—脱弹组件;5—受弹器
1.2 链式炮供弹机构工作原理
链式武器是一种外能源自动武器,其工作原理是通过带有滑块的链在链轮围成的矩形路线上周向转动,从而带动机心座前后运动。当机心座滑块在一侧长边上运动时,机心座做纵向运动,炮闩完成推弹入膛、闭锁击发、抛壳等动作[5]。当机心座滑块在另一侧长边上运动时,机心座后移,炮闩完成抽壳动作,以此实现炮闩的后坐与复进。
对于链式炮而言,电机经过减速器的作用,将较高的转速降低为适合链式炮工作的匹配转速,通过齿轮传送给链条链轮传动装置。将降低后的转速经过蜗轮蜗杆机构的再次减速,成为链式炮供弹机构的匹配转速。
1.3 供弹机构关键部件介绍
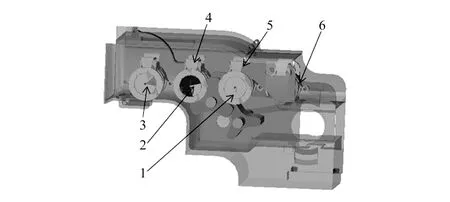
1)输弹组件是供弹机构的主要组成部分,在供弹过程中起到决定性的作用[6-10]。其作用是带动弹链,将炮弹及时并依次送到进弹口处。输弹组件主要由受弹器和输弹装置组成,受弹器的作用主要是容纳和引导弹链,传动机构主要为凸轮机构和杠杆机构。其结构图如图2所示。

1—前阻弹齿;2—压弹板扭簧;3—压弹板;4—拨弹转轮;5—推弹转轮;6—后阻弹齿
2)输弹机构的传动装置主要包括电机、减速箱、蜗轮蜗杆减速器、传动齿轮组及不完全齿轮组5个部分,其结构如图3所示。通过计算得出自动机工作一个周期电机输出轴需转2.8圈,因此通过传速比为2.8∶1的蜗轮蜗杆减速器把匹配转速传递给不完全齿轮组可使供弹机构与自动机运动相配合。

1—不完全齿轮组;2—传动齿轮组;3—蜗轮蜗杆减速器;4—减速箱;5—电机
2 供弹机构动力学仿真
为检验供弹机构结构设计的合理性、各零部件运动轨迹的可行性以及各零件的运动姿态,本文利用商用软件ADAMS对链式炮供弹机构进行动力学仿真。由于参与供弹过程的炮弹与链节数量较多,本文将只进行2 s内的供弹虚拟仿真。链式炮动力学仿真模型如图4所示,供弹机构动力学仿真模型如图5所示。

图4 链式炮动力学仿真模型
1—炮弹1;2—炮弹2;3—炮弹3;4—弹链2;5—弹链1;6—弹链0
2.1 仿真前处理
在商用软件ADAMS中设置适当的网格、重力以及材料。对相应机构添加约束、接触力及驱动,其供弹机构的主要约束及驱动见表1。

表1 供弹机构主要约束及驱动
2.2 供弹过程仿真分析
仿真得到的供弹过程中炮弹2横向位移-时间曲线图如图6所示。

图6 炮弹2横向位移-时间曲线
从图中炮弹的运动轨迹可得,推弹转轮自0 s开始转动,带动炮弹2从拨弹转轮弹槽开始横向运动,当运动到0.33 s时,炮弹2被推弹转轮带动到炮弹1的初始位置,推弹转轮停止运动,直到1.00 s结束。从1.00 s拨弹转轮开始运动,通过拨弹齿与脱弹齿的共同作用把炮弹从弹链上挤出,在1.33 s时炮弹脱落,落入推弹转轮弹槽中,拨弹转轮停止运动。推弹转轮在1.66 s开始转动,2.00 s时通过推弹齿把炮弹2推到待击发位置,同时通过底缘接触把炮弹1推入待击发位置,供弹过程结束。
供弹过程中炮弹在X方向的运动随时间变化曲线如图7所示。供弹过程中炮弹在Y方向的运动随时间变化曲线如图8所示。

图7 供弹过程中炮弹在X方向位移、速度、加速度随时间变化曲线
图8 供弹过程中炮弹在Y方向位移、速度、加速度随时间变化曲线
拨弹转轮从0 s开始运动,0—0.25 s炮弹在弹链的带动下在X和Y方向上产生位移。当炮弹在Y方向的位置达到最高点时速度与加速度产生了一定的波动,分析原因,发现是由于炮弹与拨弹转轮相互碰撞产生小幅度波动引起。当拨弹转轮运动到0.25 s时,弹链开始与脱弹齿接触,炮弹受到脱弹齿的挤压与弹链产生一定的分离,使炮弹的速度与加速度受到影响产生波动,在X方向上达到最大速度8.1 m/s,在Y方向上达到最大速度2.0 m/s。在0.33—1.00 s拨弹转轮停止运动,炮弹没有移动,但位移、速度、加速度受武器系统整体震动的影响产生较小的波动。从1.00 s开始,炮弹在脱弹齿下表面和拨弹齿共同的作用下从弹链中逐渐脱出,由于抱弹力的作用使速度和加速度变化较小,过渡平稳,1.25 s时拨弹转轮拨动炮弹从弹链中完全挤出,完成脱弹过程。1.66—2.00 s推弹转轮运动,炮弹被推到预定位置,最终速度、加速度降为0。
炮弹在1.00 s时的位置如图9所示。

图9 炮弹在1.00 s时位置
炮弹在2.00 s时的位置如图10所示。

图10 炮弹在2.00 s时的位置
供弹过程中炮弹1横向运动随时间变化曲线如图11所示。供弹过程中炮弹1纵向运动随时间变化曲线如图12所示。

图11 供弹过程炮弹1横向位移、速度、加速度随时间变化曲线
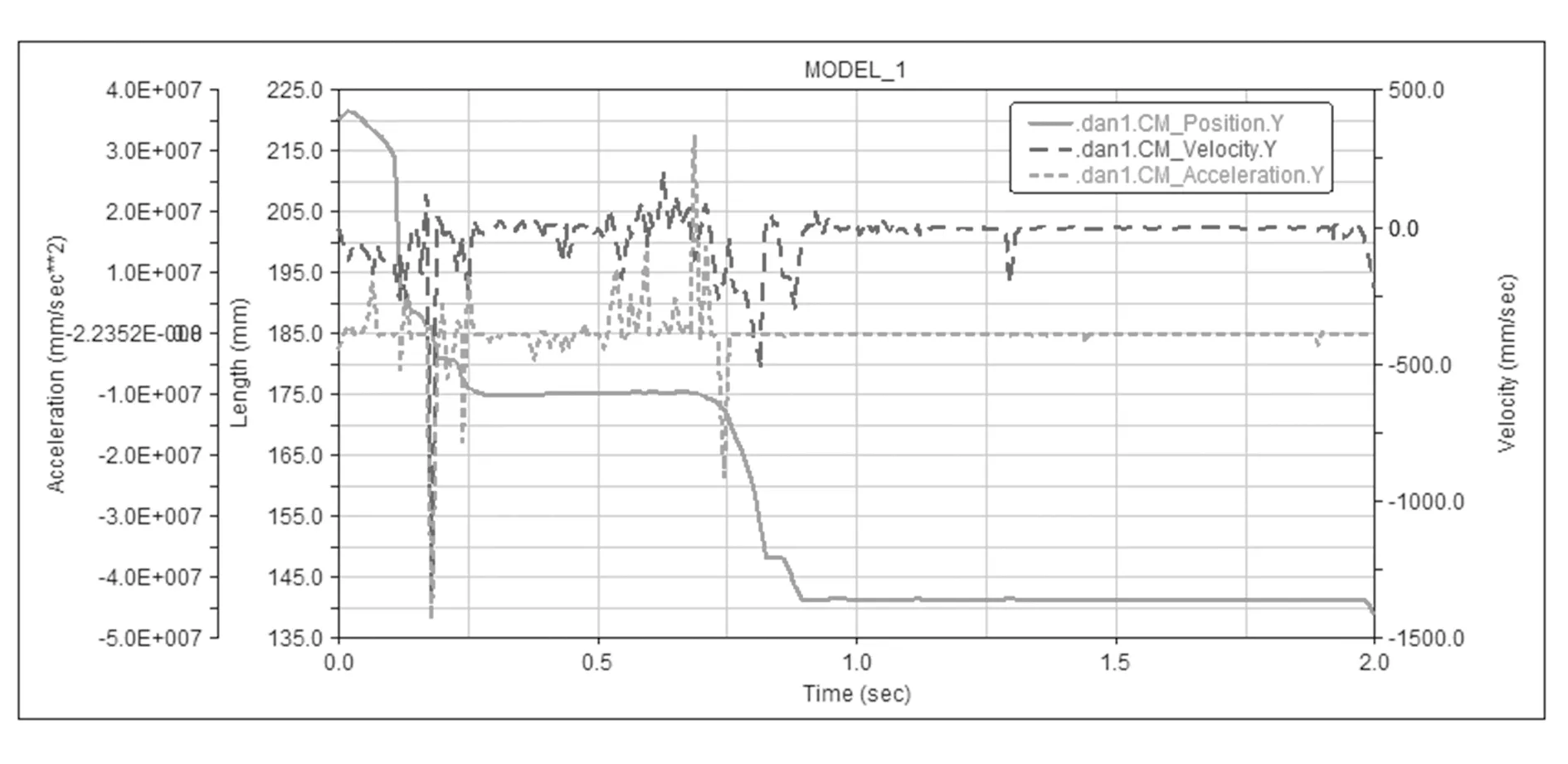
图12 供弹过程炮弹1纵向位移、速度、加速度随时间变化曲线
从图中可以看出,首发炮弹的运动规律与第二发炮弹的运动规律有所不同。0 s时首发炮弹在Y轴上处于最高点,然后随着运动逐渐降低。在0.20 s左右时,首发炮弹在拨弹齿轮和脱弹齿的作用下发生碰撞,此时炮弹与链节应该处于半脱离状态。在0.60 s推弹转轮开始带动炮弹运动,直到炮弹运动到预定位置。
2.3 推链过程仿真
弹链链节2在X轴方向上的运动随时间变化图如图13所示。

图13 弹链链节2在X轴方向上位移、速度、加速度随时间变化曲线
弹链链节2在Y轴方向上的运动随时间变化图如图14所示。

图14 弹链链节2在Y轴方向上位移、速度、加速度随时间变化曲线
从X轴方向看,弹链经历了3个运动阶段:第1阶段为0—0.33 s,弹链在拨弹转轮的带动下做圆弧运动,在0.17 s时链节达到最高位置;第2阶段为0.33—1.25 s,弹链在脱弹齿的支撑下被后一链节推着继续前进,速度、加速度较小,可以近似看作匀速直线运动;第3阶段为1.25—2.00 s,此时弹链慢慢从脱弹齿上表面落至炮匣上,推链过程结束。从Y轴方向来看,第1阶段和第3阶段存在较大的波动,速度、加速度的变化比较大,原因是弹链运动过程与炮匣、受弹器盖、炮弹、脱弹齿等发生大量碰撞。
3 结束语
本文根据某反蛙人链式炮的供弹要求,设计了一种链式供弹机构,该供弹机构供弹动作平稳可靠、供弹性能较为优良。仿真结果验证了所设计供弹机构的可行性与合理性,但在仿真过程中将电机输出轴作为刚性体进行了处理,并未考虑变形影响。该供弹机构弥补了现有反蛙人武器供弹机构的一些缺陷和不足,为链式炮整体设计提供了有力保障,也为今后供弹机构的相关设计提供了参考。
