基于慧鱼模型的双绞龙式屋顶冰雪清除装置设计
2021-10-15龚可祎杨婉振王盛熹吴何畏
龚可祎,谢 静,杨婉振,王盛熹,吴何畏
(湖北文理学院机械工程学院,湖北 襄阳 441053)
引言
我国北方地区幅员辽阔,冬季降雪持续时间长,屋顶冰雪的积累易对房屋造成安全事故,但由于国内冰雪清除机械的开发较晚,产品类型和功能尚不完备,只能用于除雪或者除冰专用,而屋顶冰雪清除机械市面上种类较少。国外的屋顶冰雪清除机械虽然种类齐全,但设备结构复杂且造价昂贵,不适于大范围推广应用。基于此本文基于慧鱼创意组件设计了一种双绞龙式屋顶冰雪清除装置,该装置可工作于不同结构屋顶,实现破冰和除雪作业,同时具有自动化程度低等特点。
1 设计方案
双向绞龙屋顶冰雪清除机整体结构图,如图1所示,主要由刮雪铲、双向绞龙除雪机构、双轨行进机构、ROBOPRO控制系统、积雪探测系统等组成。

图1 总体结构图
工作原理:双向绞龙冰雪清除机构位于房顶的两侧,通过铰链与双轨行进机构相连,绞龙设置在背负式机架下方,绞龙边缘设有破冰锥[1-2];双轨行进机构固定在机架下方,通过丝杠螺旋转动,带动冰雪清除机行进。绞龙固定在刮雪铲的内部,设在房顶的两侧,每侧有两根绞龙,采用齿轮链条传动,外设有保护套,在齿轮传动下使得两根绞龙转动方向相反。刮雪铲边缘仿锤状,对积雪进行辅助性清除。
2 双向绞龙除雪机构的设计
双向绞龙除雪机构设在房顶的两侧,每侧有两根绞龙,采用齿轮链条传动,外设有保护套;在齿轮的带动下使得两根绞龙转动方向相反[3-4]。绞龙实现屋顶积雪切削、集中和抛投功能,绞龙边缘设有破冰锥,破冰锥将因温度过低时而结冰的积雪打碎,提高了绞龙的工作效率。如图2所示。
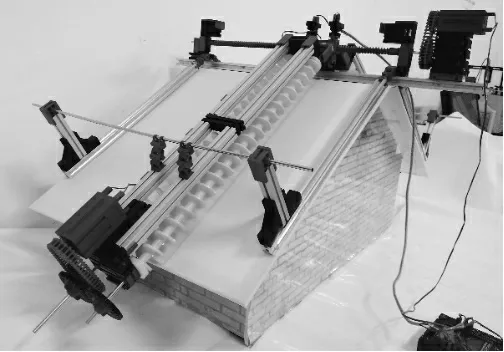
图2 双向绞龙除雪机构图
对于绞龙底部少量未清除的积雪,通过刮雪铲将雪铲起,达到高度后绞龙将雪从屋顶送下;刮雪铲采用invertor软件进行建模。刮雪铲图如3所示。

图3 刮雪铲设计结构图
该模块依靠传动装置提供前进动力使得积雪在重力和屋面斜度的作用下沿铲体滑落。刮雪铲之间通过铰链连接,在重力的作用下刮雪铲自然下垂,且预设有扭簧接位,在遇到障碍物时刮雪铲的边缘会自动弹起,增加了装置的适应性。
3 背负式机架的设计
背负式机架主要起支撑作用,有四根轴通过铰链与中心轴相连,四根轴平放在屋顶四周。绞龙在工作时由背负式机架完成对于冰雪去除机的稳定支撑;通过铰链连接,使得冰雪去除机可适用于不同坡度的屋顶作业。同时背负式设计,使得冰雪清除机安装和拆卸更为方便,装置直接放置与房屋上,即可开始工作,且无需对房屋进行大规模的改造。在轴上有铰链与轴连接,在遇到障碍物时可自动越过避障。如图4所示。

图4 背负式机架设计结构图
4 双轨行进机构的设计
双轨行进机构的作用是连接屋顶两侧的装置并通过电机带动丝杠螺旋传动进而让除雪机在屋顶行进。
慧鱼步进电机通过齿轮传动使丝杠转动,进而带动除雪机移动;齿轮传动,丝杠传动保证了两侧装置的速度同步;同时丝杠传动避免了因积雪的影响而造成除雪机移动出错;双轨行进机构底座链接于限位导轨,起到受力支撑作用,让丝杠不受力,提高了丝杠的使用寿命,同时也可使用户自行调节绞龙与屋面的距离;限位导轨避免屋顶两侧装置在行进过程中的速度不均衡,提高了装置在行进过程中的稳定性;机构顶部外加雨棚,保护装置不受雨雪等天气影响。如图5所示。

图5 双轨行进机构图
5 控制系统的设计
该设计是基于慧鱼ROBO TXT为主控制器的双向绞龙屋顶冰雪清除机控制系统,整个系统由ROBO TXT为主控制器,Mini swith微动开关,Encoder moto步进电机等和双向绞龙屋顶冰雪清除机组成[5-6]。
控制方案的设计需要了解除雪的过程,如图6所示。当用户启动装置后,除雪机处于待机状态,积雪探测系统开始检测积雪厚度,当积雪厚度达到预定值后,双向绞龙除雪装置将屋面积雪切削、集中和抛投。丝杠开始转动带动除雪机开始在屋顶行进,当双轨行进机构的传感器接触到屋脊两边挡板后,控制器接收到信号,ROBOPRO控制电机反转,进而丝杠反转,除雪机开始反向运动;当积雪厚度降到预定值以下后,装置自动归位处于待机状态[7]。

图6 除雪机工作流程图
从除雪机运动过程可以看出,在控制系统中,检测环节尤为重要。若检测环节平出现问台题,就会在积雪厚度不够的情况下启动,浪费电能。
同时在运行过程中需要设计保护程序,当除雪机在冰雪清除机因障碍物的存在而无法行进或者电机停止工作,系统自动切断工作电源,发出警报,并将信息传递到用户显示屏,如图7所示。

图7 主程序图
6 结论
实验结果表明,该装置实现了对屋顶冰雪的有效清除。相较于现有的屋顶除雪装置,改装置具有自动化程度低,可工作于不同结构的屋顶,实现破冰和除雪的同时作业,具有较好的市场前景。同时在设计中综合运用电子控制技术,以达到预期的工作效果,可直接用于机械课程创新教学。
