基于空间环境预判的航天器智能自主热控方法
2021-10-15冯建朝张晓峰廖星王岩峰赵璇刘鎏
冯建朝 张晓峰,2 廖星 王岩峰 赵璇 刘鎏
(1 中国科学院微小卫星创新研究院,上海 201203)(2哈尔滨工业大学,哈尔滨 150001)
随着空间科学探测任务需求的扩展性和复杂性的提高,空间平台(航天器)的机动性也需要增强,而强机动性必然导致航天器外部热环境的剧烈变化。在行星探测方面,我国空间科学规划的月球探测、火星探测、小行星探测、木星系统探测等计划也同样存在热环境剧烈变化的情况[1]。另外,未来拟开展的空间引力波探测卫星对光学平台的温度稳定度具有很高的要求[2],因此要求热控系统对空间热环境具有自主响应能力和预判能力。传统热控制技术主要以被动控制为主、主动控制为辅。被动式热控制主要通过合理布局和选用适当的材料及比较简单的热控装置来组织换热过程,是一种开环式控制,简便易行,但自动调节温度的能力严重不足。主动式热控制技术则是一种以被控对象的温度为反馈[3],调整热控执行机构的闭环控制措施,如加热器、流体回路、热开关、百叶窗等。虽然主动热控技术具有一定的自主调节能力,但因为以温度信号作为反馈,所以具有不同程度的时滞性。
鉴于目前主动热控制技术存在的不足,近几年出现了智能自主热控的概念[4]。NASA前些年开展了先进的智能体(Agent)技术研究,并且在深空1号(DS-1)探测器上首次完成了智能体的飞行试验[5],虽然在很多方面取得了成果,但在智能自主热控制技术方面报道很少;文献[6]对电加热器组件热控自主管理技术的智能控制策略进行了研究,虽然提出了热控自主管理智能控制技术将向精确化、智能化、与航天器其他领域自主管理相结合方向发展的思路,但并未提及航天器热控智能控制系统技术的前端反馈研究。目前国内外研究的智能自主热控制过程基本都是基于温度反馈的后端控制方法,这种以温度为反馈的方法往往因温度存在一定的滞后性,调控能力相对较弱、效率较低。鉴于此,航天器智能热控制技术需获取更加全面的空间热环境信息并对其做出预判,从而取得进一步的突破。
本文所研究的基于外热流预判的航天器智能自主热控技术是根据对航天器即将接收到的外热流预估,基于此开展相应的控制措施,抑制整个被控系统的热量变化,从而实现对温度的提前控制。这种控制方法具有很强的调节能力,能够快速、灵活地调节航天器温度,可以消除传统热控制技术的时滞性,有着较好的应用前景。
1 基于空间环境预判的智能自主热控方法
根据能量平衡方程,航天器的温度是受空间外热流、内热源、系统热熔与传热系数等共同作用的结果。其中,热熔和传热系数在一定温度范围内变化较小,内热源在常规状态下的波动也不大,因此很多工况下航天器接收到的空间外热流变化是其温度交变的主因。
(1)

在表面涂层特性确定后,航天器所接收到的空间热环境主要受其轨道和姿态的影响。当轨道初值已知时,可以用轨道递推模型计算出未来一段时间的理论轨道,这种轨道数据与精确测量解算后的真实轨道虽然存在一定的误差,但对于航天器的外热流计算是完全可以接受的[7]。航天器的姿态一般分为常规指向和任务指向。常规指向如对日指向、对地指向、飞行姿态指向等,这一类的指向信息都由航天器自主获取;而任务指向较为复杂的姿态控制,多为不同指向模式的组合,甚至包含大范围的机动姿态[8],需要进行姿态的规划,这一类的指向信息可由地面上注获取,所以航天器在未来一定时间内的姿态是可预知的。因此,可提前规划的航天器轨道和姿态信息,就为航天器的外热流预判提供了可能。
1.1 外热流预判的智能自主热控方法
基于外热流预判的智能自主控温总体设计如图1所示,被控部件的目标温度主要由外热流、内热源、热控执行部件、主动加热器和系统内传热关系决定。其中,热控执行部件、内热源和主动加热器均为可调控部件,其调节指令来自智能分析模块,而智能分析的信息则主要来源于外热流的预判和内置的航天器传热模型。从功能上,智能自主控温系统可以分成外热流预判模块、智能分析模块和执行部件3个部分。

图1 基于外热流预判的智能自主热控总体设计Fig.1 Overall design of intelligent autonomous thermal control based on external heat flux prediction
(1)外热流预判模块是根据航天器未来一段时间内的任务规划的轨道和姿态参数,分析计算出外表面在未来各时刻的吸收外热流数值,其中天体辐射、表面涂层等相关参数可通过预先设定好的数据库获取。如太阳辐射强度,其数值在每天略有不同,外热流预判模块根据数据库预置数据进行查表获取当天的太阳辐射强度。航天器表面涂层的吸收系数在轨退化后可通过地面指令上注进行必要的修正。
(2)智能分析模块是根据外热流的预示结果和航天器上的预置传热模型,在进行分析后给出相应的指令。其预置的传热模型为地面验证后的数学模型,部分传热系数可根据温度控制结果进行反馈修正。智能分析模块的具体功能可根据应用的场景和工况进行适应的匹配,生成合理的指令序列。例如,大功率散热应用场景要求其具有“辐射-热传导-对流”耦合换热求解功能,提前规划出展开辐射器、流体换热等相关指令;深空探测应用场景要求其具有强大的热控自主管理功能,能够根据星上的传感数据,自主任务规划;高精度控温应用场景要求其具有“频域-时域”综合分析功能。另外,智能分析模块还可读取实时的传感信息,进行智能自主热控的任务规划。如实时的轨道、姿态与任务规划的预期偏差大于设计阈值或其它故障时,能够自主跳出,提前规避风险。
(3)执行部件包括航天器的主动加热器、可调可控热控部件(如可调节辐射器、流体回路、热开关等等)和被控部件自身热负载等。这些部件均可根据外热流预判的结果进行提前规划执行指令,不必等到温度信号超过预期后再执行操作。
基于外热流预判的智能自主热控方法最大的改进是将航天器热控由常规的温度信号反馈变更为热流反馈。调整后,热控就由后端控制改为前端控制,避免了温度的惯性带来的时延,在一定程度上增加了热控的自主性、提高了温度的平稳性、降低星上主动加热的需求。而且,在不同的应用领域,虽然智能分析模块和执行部件具有多样性,但外热流预判的通用性可以使得其进行应用拓展。
1.2 外热流数值解算
航天器表面到达的空间辐射热流主要包括太阳直接辐射、地球反照和地球红外辐射三部分热流。与温度不同,航天器外热流大小q无继承性,而只与某时刻航天器的空间位置、姿态角度、天体辐射参数等相关[3],即
q=f(x1,x2,x3…)
(2)
式中:x1、x2、x3……为航天器某时刻的轨道参数、姿态角度、天体辐射参数等。
1.2.1 太阳辐射热流
太阳光到达地球附近时发散角度约为0.5°,但在地球轨道航天器的热设计中,一般认为投射到星体表面的太阳光为平行光。当航天器处于光照区时,面积为A的表面的太阳辐射热流,与该表面与太阳矢量夹角βs有关[3],即
(3)
式中:S为太阳常数,v为真近点角,v1、v2为进、出阴影区真近点角。
1.2.2 地球红外辐射热流
在地球红外辐射热流的计算中,通常将地球等效为温度在250 K左右的均匀黑体。因此其大小仅和航天器表面与地球的相对位置相关[3]。
将地球对航天器的可视区域分为N等份,则某一时刻航天器表面到达的地球红外热流为
(4)
式中:φm为地球某一微元面对航天器表面的角系数,Te为地球温度,Sm为地球微元面积。
1.2.3 地球红外辐射热流
地球反照热流是指地球将太阳光反照到航天器表面的辐射热流,其大小与某时刻航天器—地球—太阳的相对位置有关[3]。在计算中通常将其等效为漫反射,计算公式为
(5)
式中:ρ为反照率,γm为太阳矢量与地球微元面法相量的夹角。
2 智能自主热控方法的验证
2.1 航天器热模型
为验证智能自主热控方法的可行性,本文采用图2所示的航天器热控系统进行分析验证。航天器的构型为典型的立方体,太阳翼(红色部分)位于±X侧,单机(蓝色)安装于-Y侧板内部,-Y侧板外部为可调节辐射器,其中黄色为低吸辐比涂层(白漆),淡蓝色为隔热层(多层隔热组件)。具体参数如下:航天器舱体尺寸为1 m×1 m×1 m;单机尺寸为0.4 m×0.4 m×0.3 m;单机热容为5000J/K。

图2 航天器热模型Fig.2 Spacecraft thermal model
2.2 外热流预判
航天器的飞行轨道高度为600 km的圆轨道,轨道倾角为35°,外热流预判时段为光照角57°附近。
航天器的飞行姿态是阴影区三轴稳定,+Z轴指向地球,+X为飞行方向;光照区惯性定向,-Z轴指向太阳;航天器工作时+Z轴指向地球,+X为飞行方向,工作时长为20 min,如图3所示。
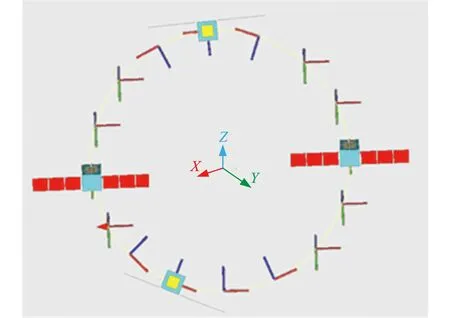
图3 航天器飞行姿态Fig.3 Spacecraft attitude
在设计中,单机主要受-Y方向外热流的影响。向外热流预判模块输入轨道和姿态参数后,可以预示未来一个周期内-Y方向外热流变化如图4所示。
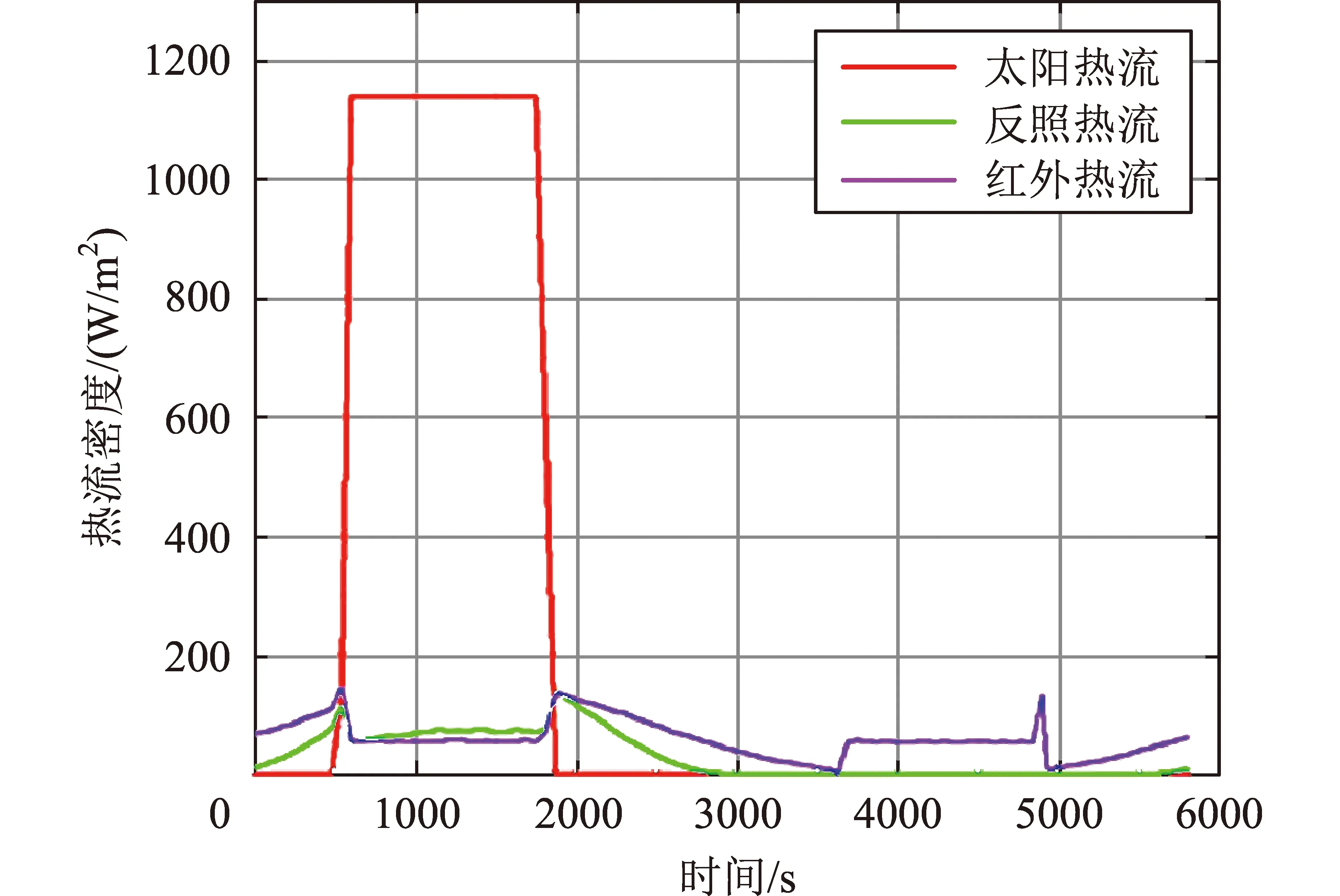
图4 外热流变化曲线Fig.4 External heat flux
2.3 智能分析

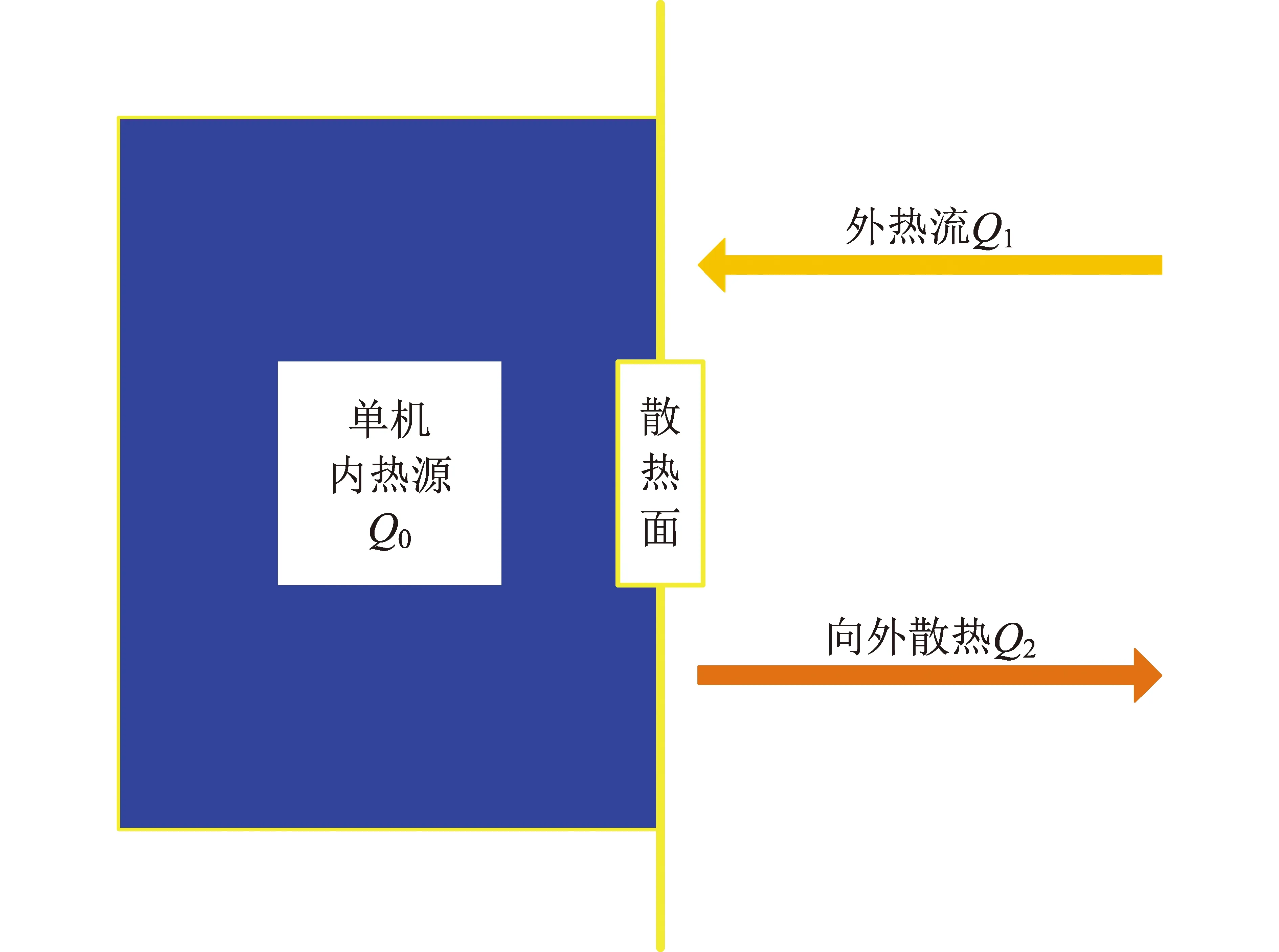
图5 系统换热关系图Fig.5 System heat transfer diagram
(6)
式中:C为系统热容,τ为系统运行时间。
为了简化计算,忽略漏热量Q3,则由式(6)可知,若要提高单机温度稳定性,只需要满足关系式
Q0+Q1-Q2=0
(7)
其中,散热面吸收热流Q1由太阳辐射热流Q1,s,地球反照热流Q1,a和地球红外辐射热流Q1,e三部分组成。
系统通过散热面向宇宙空间辐射出去的热量Q2的计算式为
(8)
式中:Sn为散热面面积;ε为散热面的表面辐射率,Tr为散热面温度。
将以上方程整理后可得关系式为
(9)
式中:q1,s,q1,a和q1,e分别为太阳辐射热流密度、反照热流密度和地球红外辐射热流密度的预判值。当单机热耗Q0和目标温度Tr已知时,智能分析模块将依据外热流预示结果,做出指令调节序列Sn(t),其中Sn为可调节辐射器面积。
设定单机工作时热耗为50 W,待机时热耗为10 W,目标温度Tr=20 ℃,则结合外热流预判数值,可以得到辐射器调控指令序列为
Sn(τ)=[0.03,0.03,0.03……]
(10)
为了简化指令序列,将Sn(t)分为两个范围0.0~0.05 m2和0.7~0.8 m2,并分别在这两个范围内求其平均值,如图6所示,分别为0.04 m2和0.75 m2。这表明在航天器任务期间,位于卫星-Y侧的可调节辐射器的散热面面积将扩大为0.75 m2,其余时间段散热面面积保持为0.03 m2。
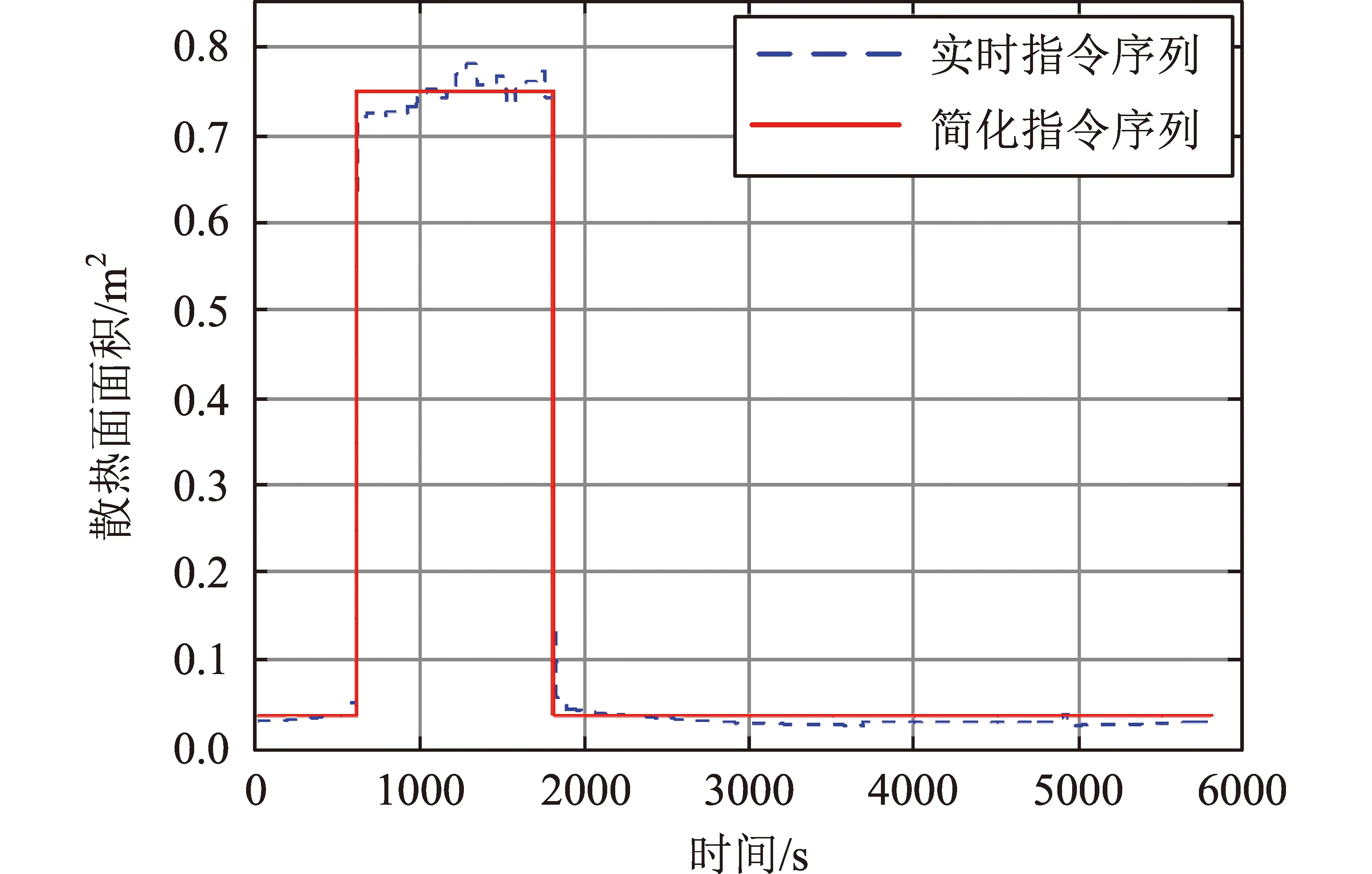
图6 指令序列简化结果Fig.6 Simplified instruction sequence
2.4 指令执行
上述设计中的可调节辐射器,通过调节散热面或多层面积的大小来实现单机控温。为了便于计算验证,简化执行部件的执行速率影响,执行时间相对于指令序列的时间间隔不作考虑。
2.5 仿真结果
在基于外热流预判的智能自主控温方法下,单机温度变化范围为19.7~20.1 ℃,如图7所示,控温系统所需功耗主要来自控制器和执行机构,功率不超过20 W。
采用传统的被动热控方法时,为了使得单机温度接近控温目标,则散热面大小设计需要同时兼顾非工作期间的低温和工作期间的高温端温度指标要求,散热面设计为0.07 m2,结果如图7所示,单机的温度变化范围为16~24.4 ℃,在充分考虑到系统热容后温度波动依然较大。在温度稳定度需求不高时,传统被动式热控的简单、高可靠特点依然具有明显的优势。
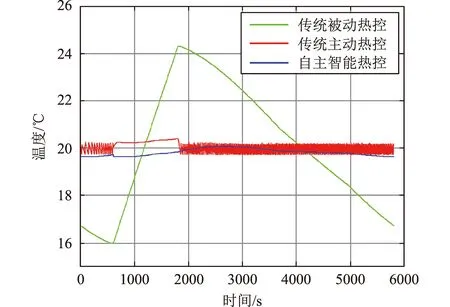
图7 智能自主控温曲线Fig.7 Intelligent autonomous temperature control curve
采用主动加热控温方法时,为了防止单机瞬时工作温度过冲,则需要较大的散热面,其大小设计为0.72 m2。当控温区间设定为[19.5,20.5]时,单机实际温度变化范围为19.5~20.6 ℃,同时需要加热补偿功耗150 W。因此,对于瞬时工作的大功率单机,如有高精度要求就会带来功率的大幅度消耗,而且单机工作时依然会在高温端产生温度过冲。
与传统被动热控相比,智能自主热控具有更好的温度稳定性,温度波动为0.4 ℃,而后者则高达8.4 ℃;相比与传统主动热控,智能自主热控功率需求大幅度降低。这表明:基于外热流预判的智能自主控温方法具有较高的温度稳定性,同时可以节约星上的资源消耗。再配合一些辅助的热控措施,还可以实现对空间热环境剧变下的精密控温。
3 智能自主热控的应用分析
根据智能自主热控方法的仿真验证可知,基于外热流预判的航天器智能自主热控方法不仅可以解决传统热控技术自适应能力差、存在时滞性的难题,还能使热控技术更加高效、灵活。
基于外热流预判的智能自主热控方法在高精度控温、大功率散热、能源管理等应用领域,也有较好的应用。为便于说明,下述应用场景均以简化后的立方体航天器模型为例,如图8所示,单机位于航天器中心。

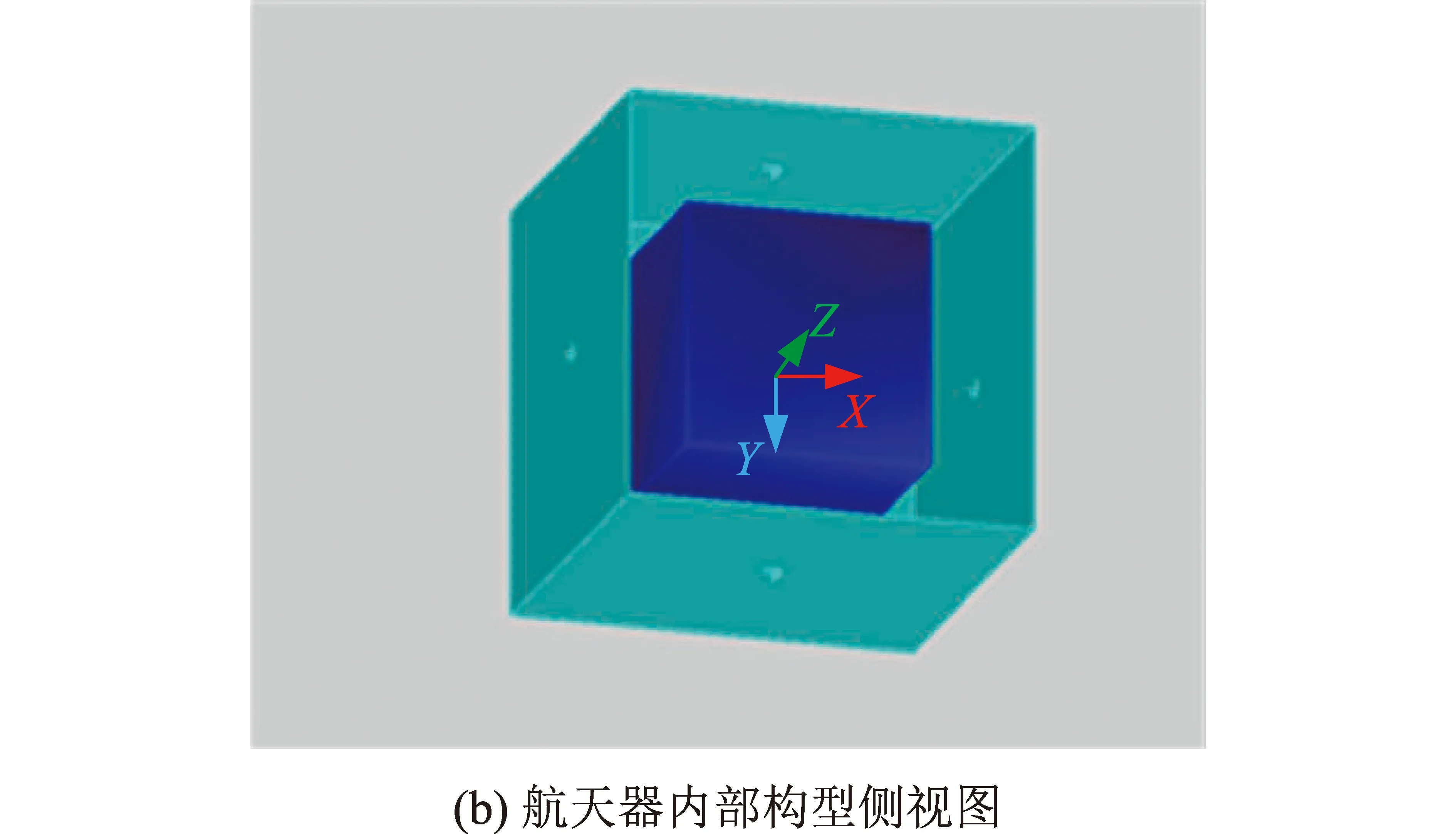
图8 航天器模型Fig.8 Spacecraft model
3.1 智能自主热控的高精度控温
消除环境热噪声是实现精密控温面临的难题,无论是航天器进出地影区时的热冲击,还是周期性飞行所产生的低频热干扰,传统控温技术都难以解决,其根本原因是热调控动作滞于环境噪声。而外热流预判技术可以预知航天器热环境的变化趋势,并经智能分析,预先制定出相应的控温策略。
以图8中航天器为例,假定其外表面受到的辐射热流高低频叠加,经分析低频信号频率为0.000 1 Hz,如图9(a)所示。当这种低频热扰动信号被预判且提取出来后,智能分析、执行模块就可以在相应时段内对航天器施加一个频率同样为0.000 1 Hz的低频热补偿,如图9(b)所示。
如图10所示,智能精密控温前,单机受低频热扰动较大,温度变化幅值为223 mK,表明:传统的控温方法很难抑制低频噪声。对航天器进行低频热补偿后,单机的温度变化幅值为0.03 mK,较于前者,提高了4个量级,很大程度上抑制了低频信号的干扰。


图10 高精度热控效果对比图Fig.10 High accuracy thermal control effect comparison chart
由此可知,基于外热流预判的智能精密热控技术可以有效地抑制低频热噪声。随着信号提取准确度和模拟补偿信号精度的不断提高,此方法还可以实现更高的控温精度。
3.2 大功率散热的智能自主管理
为了增大覆盖面积,降低成本,越来越多的航天器采用大倾角甚至极地轨道。航天器的空间热环境也变得越来越恶劣。另因载荷需求,航天器本身的热耗往往也较大,这就对航天器热控制技术提出了更高的要求。
以图8航天器模型为例,其6个方向随太阳矢量与轨道面夹角值变化的平均外热流如图11所示,该轨道下航天器不存在理想的散热面,6个侧面均会受到太阳光的照射,具有一定的波动性,尤其是±Y侧,最为严重。基于此空间热环境,传统热控制技术路线为:一方面在航天器表面尽量多地设计散热面,并用大量热管实现等温化;另一方面是在载荷待机状态时,用大功耗的电加热器补偿热量以维持各器件的存储温度。

图11 外热流随轨道面太阳矢量夹角变化曲线Fig.11 Variation curve of external heat flux with orbital illumination angle
参考某航天器,载荷工作时热耗为1500 W,待机时热耗为200 W。为了满足控温要求,低温工况时,需要补偿700 W主动热耗,对能源消耗较大。而使用本文研究的智能自主热控技术,能使得航天器依据外热流的变化规律,及时调节辐射器向外辐射的能量,以减少主动热补偿和热管网络的使用。经分析,低温工况下,通过可调节辐射器,可关闭除-Z侧外的其余5个散热面。在满足控温需求的同时,主动热补偿为0。这表明:本文所研究的热控制技术,能有效解决复杂空间热环境下瞬时大功率载荷带来的难题,既能有效降低能耗,又能优化航天器的结构布局。
4 结束语
本文提出的基于外热流预判技术的航天器智能自主热控方法,旨在将航天器热控由后端的温度反馈调整为前端的热流反馈,控制点前移提高了航天器面临复杂空间热环境时的适应能力,增加了航天器的热控自主调节能力。通过对不同应用场景的应用仿真分析表明:基于外热流预判的智能自主热控制方法可行,且较大地提高了热控系统的自适应性。该方法具有广泛的应用前景,在航天器精密控温领域,可以有效地抑制低频热噪声;在大功率散热管理领域,能在很大程度上降低航天器温度波动范围,节约其所需的热补偿功率;在深空探测方面,可以开展航天器自主任务规划。航天器的智能自主热控研究,是未来航天器热控技术的重要研究方向。