基于自动紧急制动(AEB)检测系统的行人假人下体外封闭层开发
2021-10-14王春节
王春节,尹 玲
(常熟理工学院 纺织服装与设计学院,江苏 苏州215500)
随着智能汽车主动安全的发展,汽车的安全标准不断提高,行人碰撞对主动安全的研究有重要的意义。相关研究表明,装配有汽车自动紧急制动系统(autonomous emergency brake,AEB)的汽车能够显著提升汽车的安全性,降低对行人的危害[1]。AEB行人系统测试装置是基于法规标准产生的测试设备,其中AEB软体目标假人是用于模拟目标行人的人体模型,为行人碰撞试验充当撞击目标物。外封闭层是假人外部用于体现衣服/皮肤/头发的布制品。碰撞试验时,合体包裹假人的外封闭层,能够最大限度地模拟行人,提升行人的仿真度,同时其表面的纺织品具抗撕裂、防水、低辨识、非反射性材质,能够有效提升试验数据的准确性,对假人的雷达红外反射信号起着决定性作用。
目前基于国内标准体型的行人假人研究较少。中国汽车技术研究中心的解明浩研究了国外成熟的某款AEB软体目标假人的上衣织物属性,为国内AEB软体目标假人外衣织物开发做准备[2]。刘伟东通过对50百分位中国体征的男性假人进行研究,获取人体运动的步幅、双腿正面间距、摆臂角、运动速度,为中国人体AEB行人假人开发提供数据支撑[3]。国际通用的行人假人以欧洲人的体型特征研制,不符合中国人的体型,无法提高事故再现的准确性,所以并不适合中国汽车行业使用。因此研究适合中国人体型特征的行人假人对我国AEB测试装置的研究具有重要的指导意义。
通过三维扫描国内某公司开发的标准男体行人假人,得到假人的关键部位数据和三维形态,完成了假人下肢外封闭层的款式设计、样板开发及样衣制作,为国内行人假人标准的制定提供了参考。
1 AEB行人假人关键部位尺寸与三维形态获取
某企业依据中国标准男体制作的AEB行人假人如图1所示。采用北京博维恒信公司的3D camega非接触三维人体扫描仪对假人进行三维扫描,获得的假人下体关键部位尺寸见表1。
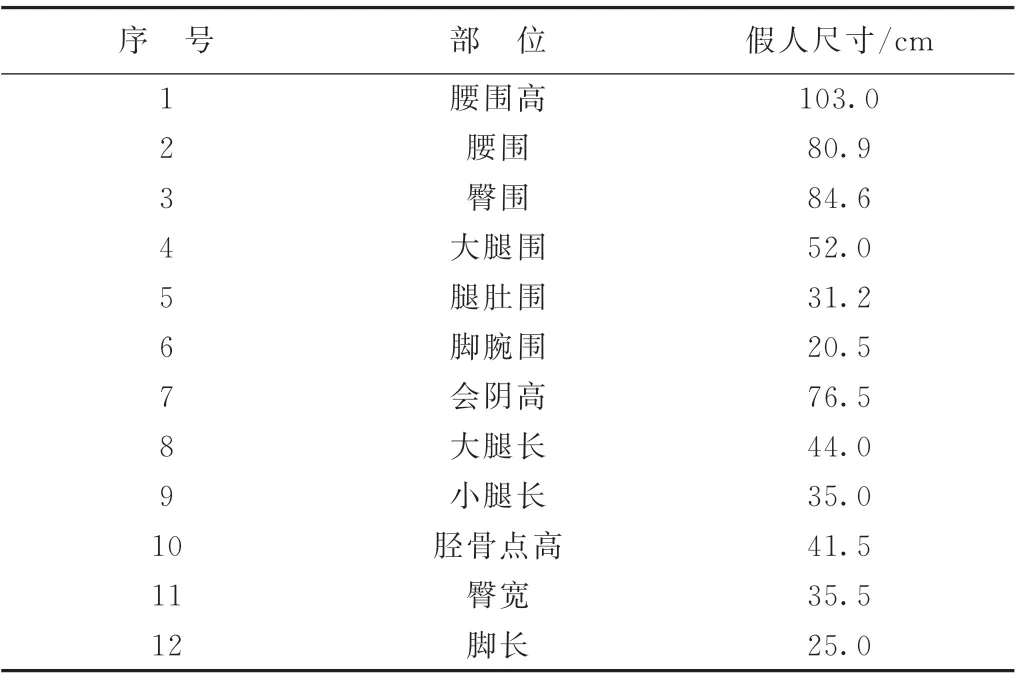
表1 假人下体关键部位尺寸

图1 AEB行人假人
2 AEB行人假人与实际人体的共异性分析
虽然AEB行人假人的外观造型源于标准人体,但其构造与人体不尽相同。行人目标必须能够代表与车辆中使用的传感器相关的人为属性,行人是穿着长袖T恤和不同颜色的裤子,黑色T恤和蓝色牛仔裤,衣服必须由防撕裂和防水材料制成。皮肤表面部分必须具有非反射性的肉色纹理。行人假人衣服和皮肤在850~910 nm波长范围内的红外线反射率必须在40%~60%的范围内[4]。在测试中为避免车辆的损坏,行人假人不能存在硬质点,假人支架的反射率为0。行人假人部分参数见表2。
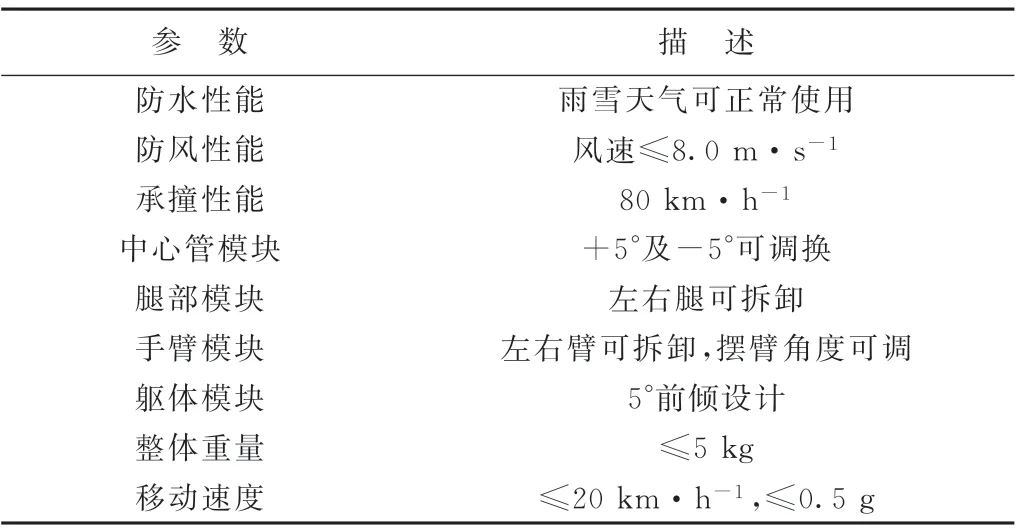
表2 AEB行人假人部分性能参数
标准人体的股关节为多轴型关节,股骨头为3/4的球体,以股骨头为中心,腿部可实现多方向的绕轴运动。而假人的臀部是以电动机作为动力驱使腿绕电动机输出轴进行绕轴运动,在运动的过程中,轴体的转向较为单一,是单轴关节。关节类型不一样决定了假人下肢外封闭层的样板结构不同于人体的裤装结构。人体骨盆和假人臀部构造示意图如图2所示。
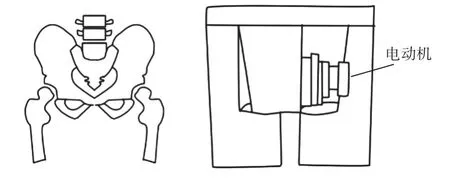
图2 人体骨盆与假人臀部对照图
3 AEB行人假人下肢人体工学及结构分析
在汽车碰撞检测试验中,行人假人需要以规定的速度模拟行走。从人体角度看,在行走的过程中,股关节和膝关节肌肉会发生屈伸,相应的臀部及膝盖部位的皮肤会发生不同程度和不同方向的拉伸变化,所以在设计包裹下肢的外封闭层样板结构时,必须结合人体工学分析,考虑这两个部位的拉伸量变化。
3.1 臀部封闭层结构
人体下半身在运动时,皮肤伸展的主要线路是大臀部——臀沟——大腿内侧——膝盖,如图3所示。这是提高裤子运动功能的主要线路[5],根据拉伸量的大小及方向确定臀部功能区的样板结构。人体下肢运动引起裤子牵引拉伸的方向示意图如图4所示。
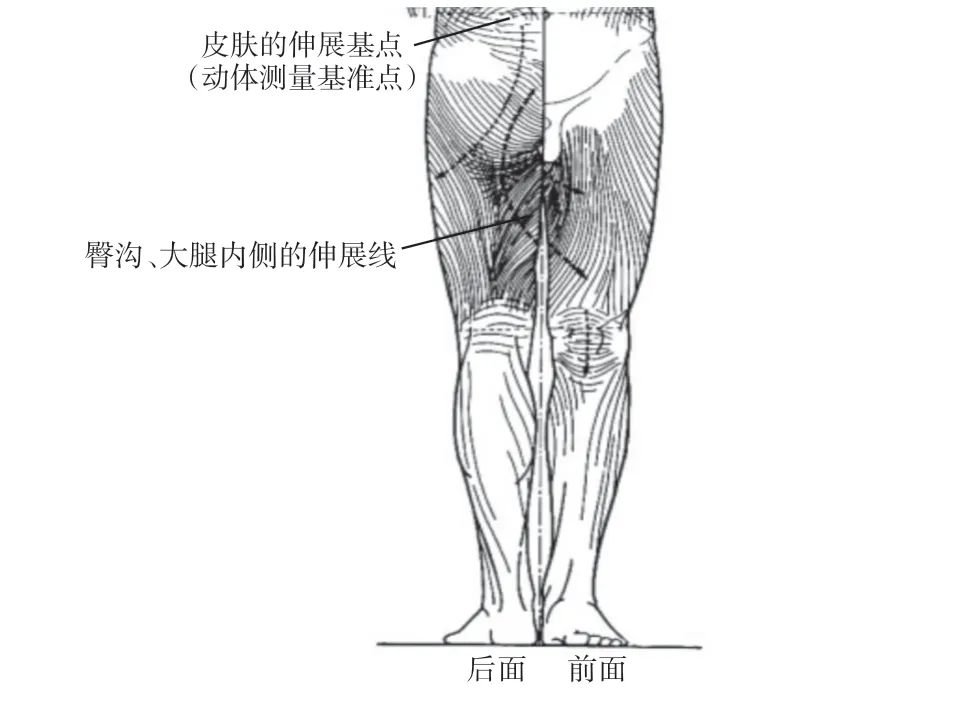
图3 下半身皮肤皱纹和主要伸展方向
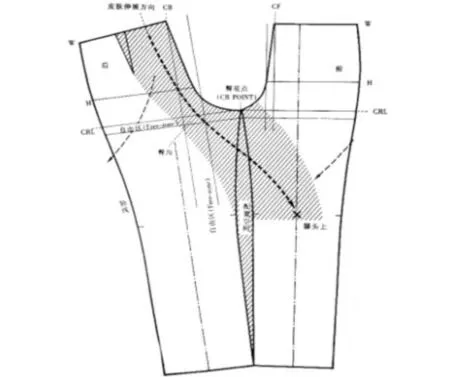
图4 人体下半身运动引起的裤子牵引方向示意图
假人的臀部是单轴关节,只能绕轴前后摆动,所以下体的纵向拉伸最大。经查阅文献[6]发现,人体大腿抬高45°时,臀沟附近皮肤的伸长率可达到约30%;大腿抬升至90°时,臀沟附近皮肤的伸长率最大,超过40%。前臀部位的拉伸率约为10%~20%。假人必须能完成步行和骑在摩托车上2种动作,大腿的抬升角度约为90°,此时裤子的后臀纵向拉伸最大,如图5所示。综合人体前臀部和后臀部的纵向变化率,在裤子的大腿根部采用横向刀褶的工艺设计,后臀部褶裥量大于前臀部放松量。
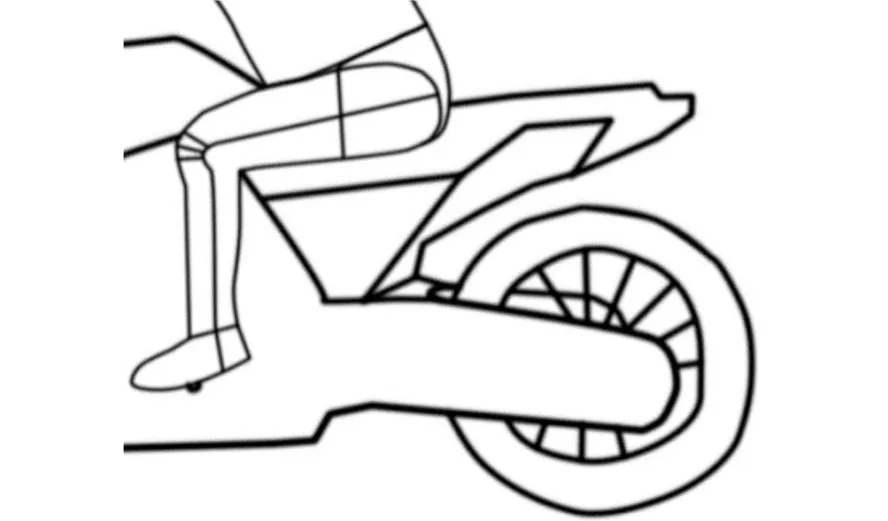
图5 行人假人骑行摩托车腿部弯曲示意图
按正常人体所穿带裆底的裤子的结构制作外封闭层,由于假人的臀部骨盆处是一个有宽度和厚度的电动机,很容易出现卡裆现象,会损伤假人的结构,不利于下肢的灵活摆动。另外,行人假人重心区还有支撑柱的存在,所以,假人下体外封闭层的裆部采用开裆设计。
3.2 腿部的封闭层结构
假人的腿部模块可拆卸。膝盖为单轴性结构,只能绕轴前后摆动。对实际人体而言,在这一动作过程中,膝盖表面皮肤纵向拉伸量为27%~47%,皮肤的拉伸值约为1.85 cm。在抬腿的过程中,臀部延展区至膝盖方向纵向拉伸率约为11%~26%[7],拉伸值约为1.3 cm,两者拉伸和为3.15 cm。
基于此,在腿部外封闭层的膝关节处采用刀褶工艺,以增大膝关节处的纵向拉伸量,褶裥的量约为2倍的皮肤拉伸量,即切缝展开量约6 cm。
3.3 脚部的封闭层结构
脚部封闭层参照鞋子结构。鞋子从结构上分为素头式、分节式、舌式、围盖式等结构[8]。在碰撞试验中,行人假人的脚部不受人心理认知的影响,试验中鞋子的主要功能是方便行人假人的穿脱,故鞋子定为舌式结构。
在缝制过程中裤装的脚腕部分与鞋相连接。由于面料的服贴性较差,常规的直接缝合使得脚腕与脚面连接处产生堆叠,影响裤子的整体美观性。重新对此处的结构进行设计,将裤子的脚腕前部余量与鞋舌相结合形成插片,让鞋舌末端的弧线契合脚腕的围度,减少纺织品在脚面的堆叠,提升连体鞋子的合体程度,如图6所示。
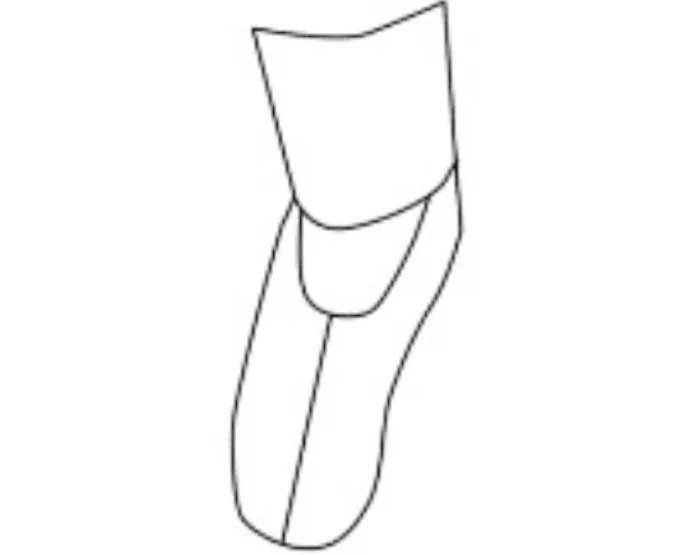
图6 鞋子插片示意图
4 AEB下肢外封闭层款式设计及样板开发
综合假人关键部位的人体工学分析,下肢封闭层款式及外封闭层结构样板如图7和图8所示。

图7 行人假人下肢封闭层款式图
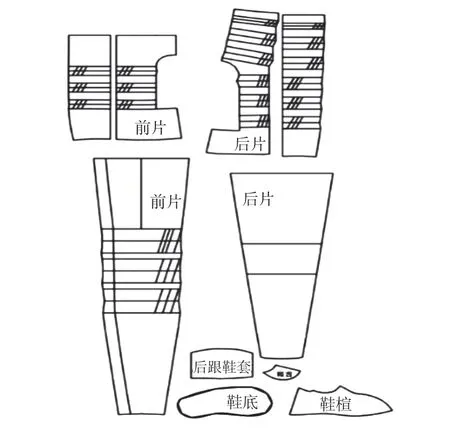
图8 外封闭层结构结构图
5 AEB行人假人下肢外封闭层虚拟试衣与成衣制作
将扫描的行人假人模型导入CLO3D软件作为虚拟试衣的模特,样板虚拟缝合后的试衣效果如图9所示,整体较为合体。样衣制作效果如图10所示。
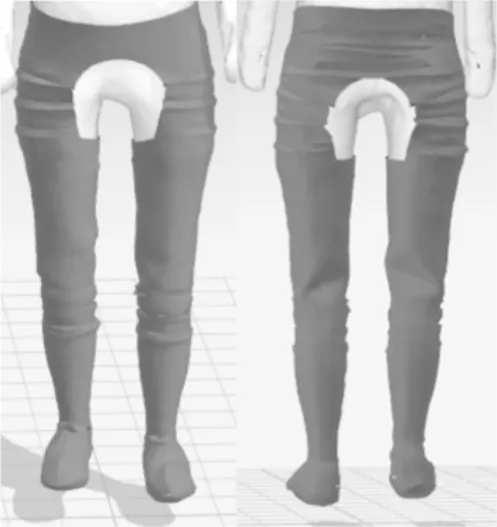
图9 假人虚拟试衣图

图10 假人下肢外封闭层的三视面
6 结语
将国内某公司开发的行人假人进行三维扫描得到假人的下肢数据,使用人体工学对假人下肢进行分析,确定关键部位的放松量,结合所扫描的假人下肢数据最终得到假人下肢外封闭层的样板。通过样衣试验确定样板的可行性,研究结果表明所开发的样板符合要求,同时为国内假人的标准的制定提供了一定的技术参考。