PSS2B型电力系统稳定器交轴电抗取值探讨
2021-10-09马明锐
文/马明锐
0 引言
近年来,我国国民经济在国家政策指导下高速发展,电力需求快速增长,西电东输等电力工程建设突飞猛进,呈现远距离、大容量输电格局以及快速励磁系统广泛应用,但也导致电网系统低频振荡问题日益凸显,甚至成为限制电网传输能力的瓶颈。目前,电网主要采用的是微机式励磁控制系统,通过在励磁控制闭环中叠加电力系统稳定器(power system stabilizer,PSS)为系统提供正阻尼,可高效抑制低频振荡的产生,优化整定PSS参数可令机组得到趋于理想的动态性能,进一步提高电力系统的稳定性。目前,电力试验从业员进行PSS现场参数整定与优化试验时,主要的试验步骤如下:通过信号发生器输入白噪声实测获得励磁调节器(AVR)的无补偿频率特性;根据实测数据对PSS相关参数进行优化及调整,并在实际扰动试验中验证PSS参数的效果。而在PSS参数中摇摆电抗的参数优化是充分发挥PSS的重要条件,这是研究PSS实际应用中必须要重视的问题。
1 双输入PSS模型及作用原理
IEEE Std 421.5中双输入PSS的模型如图1所示。其中 与P为PSS的2个输入信号,分别对应频率 和电功率。利用隔直滤波环节将输入信号合成加速功率的积分,可使发电机在调整机械功率时通过该环节将加速功率合成为0,消除了机组有功功率快速变化时对无功功率的影响,避免了反调现象的发生。当机组电功率发生波动时,合成的信号可通过相位补偿环节调节附加控制信号。
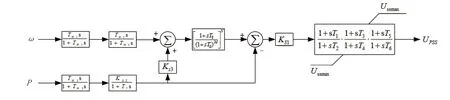
图1 IEEE Std 42 1 5中的 PSS2B数学模型
下文将对PSS2A/2B的工作原理作简略介绍。
同步发电机的转子运动方程为:
式(1)中:M为发电机转子的转动惯量;M=2H;Tm为原动机转矩,亦可称为机械转矩;Te为发电机的电磁转矩。
折算成标幺值,当机组稳定在同步转速范围内速率变化不大,可以将转速替代转换成电功率,因此(1)式可变为:

将式(2)变换成频域形式,并将式中各个变量用偏差代替,得到下式:
将式(3)的机械功率增量通过G(s)滤波,得到:

则得到加速功率为:

根据图1,输入信号 通过隔直环节后得到 ,随后经过滤波环节得到 ;同样另一个输入信号P亦通过隔直环节后得到 ,经过滤波放大为1/2(2H)倍后与 相叠加产生为 通过高频滤波环节后与原信号作差得到加速功率信号 ,信号被放大环节进行放大(KS1倍)后,通过超前滞后环节进行相位补偿校正,最终以PSS信号输出到转子电压控制信号中。
当发电机有功功率因调节原动机调整机械功率而发生变化时,PSS应不起作用;当电网系统发生低频振荡导致发电机有功功率产生波动,此时PSS应输出正阻尼信号叠加至励磁调节器,抑制低频振荡、提高系统稳定性。PSS2A/2B最显著的优点是防止发电机因原动机机械功率变化时产生的反调作用,使PSS仅在系统低频振荡时起作用。
2 PSS2B输入信号的获取方法及研究
目前,国内外励磁调节器厂家对PSS2B的双输入信号P和的获取方法趋于一致,其中电磁功率信号P在励磁调节器中可以通过计算获得,而转度信号由于不同的微机软件逻辑有两类获取方法:一是通过励磁调节器内部元器件测量得到发电机的内电势模拟量,利用内电势模拟量中的频率数值可以测量得到机组的转速信号;二是通过软件计算获得信号,通过计算内电势的相位直接获得,或是计算电势三角形得到发电机的内电势后,在坐标轴中计算内电势与机端电压的夹角大小以得到内电势的角频率。
以上两种方法在计算转速信号时各有优势,其中通过硬件法计算内电势比较简单直接,但由于交轴电抗会随发电机转速波动而变化,导致难以获得准确的数值,因此在工程实际应用中较少采用硬件法来获得转速w信号。而软件方法计算转速w信号因其设计具有调试简便、计算简单、结果可靠等众多优点,被国内外励磁厂家普遍采用。本文主要介绍、探讨现今主要采用的2种软件实现方法,两种方法的主要差异是发电机内电势Eq频率的不同计算方法。
第一种方法是通过求解发电机的向量三角形获得发电机内电势的频率,发电机的功角向量关系如图2所示。
从图2中可见,oxy为同步坐标系,odq为发电机转子的交直轴坐标系,其中Vt与It为机端相电压和相电流。可从图2得其中为电压与x轴的夹角,其数值通过对机端电压信号进行过零检测获得;而为q轴与x轴的夹角,通过发电机转子的位置获得,从而可以简单求得功角。

图2 发电机功角向量关系(一)
通过内部电势Eq公式求出Eq的幅值:

式(6)中:VAB为机端AB相的线电压;IC为C相电流。
转换为:

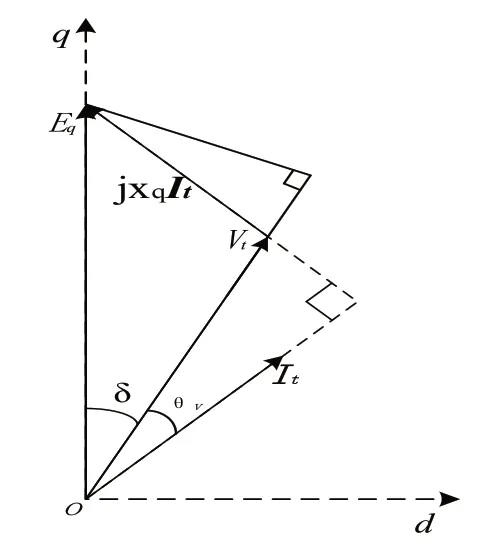
图3 发电机功角向量关系(二)
由图3向量关系可以得:
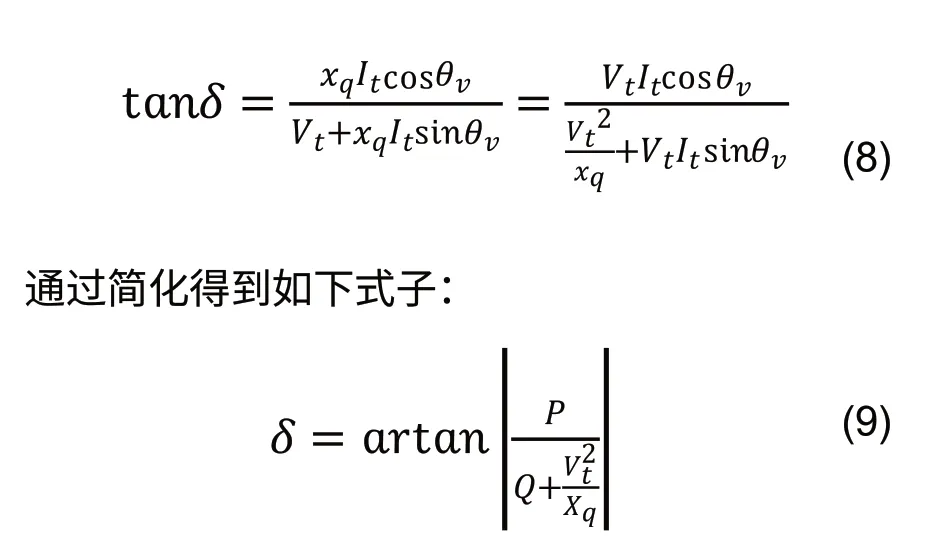
式(9)中:P、Q分别为发电机有功功率和无功功率;Xq为同步交轴电抗。
式(7)和(9)的主要差异为:式(9)可以在励磁调节器中直接调取已采集的P、Q、Vt等模拟量,减少计算工作量。通过上述式子获得 ,继而对 求导得到发电机转速频率。
第二种软件计算方法是利用发电机定子的 坐标系,计算向量如图4所示。因 坐标系内电势Eq是固定的,则可以通过内电势Eq和a轴间夹角的变化率来计算得到发电机转速的变化量。由图4可以得到:
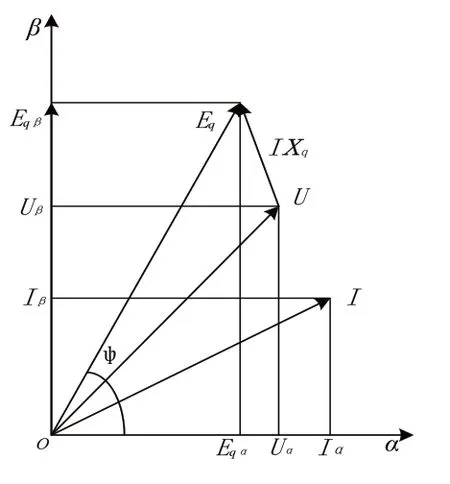
图4 通过固定的发电机定子/坐标系求转速信号

励磁调节器微机软件实时采样过程是通过采样周期来获得发电机机端电压及定子电流的实时数值,通过求解得到在发电机相对固定的坐标系中内电势和轴的变化率,继而求得相邻采样周期间的相角变化值就可以求得发电机内电势的频率Eq。
由图4进一步可得:
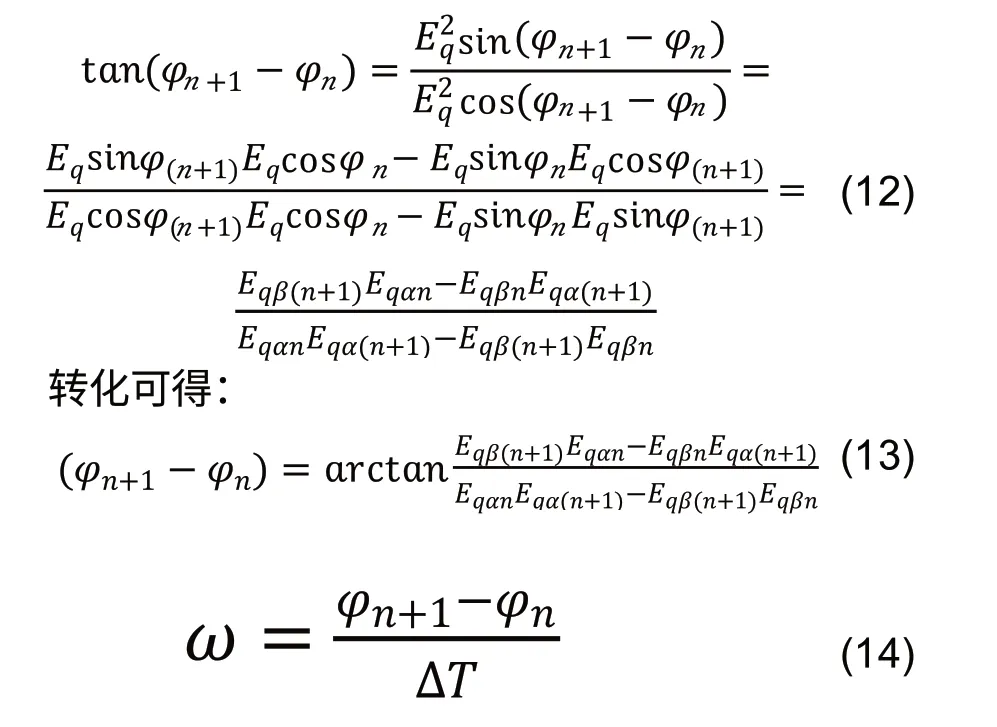
由上述演算过程,比较两种软件求解方式后可见,同样求解内电势Eq的频率,第二种方法计算直观、工作量小、软件编制较为简单,故在国内外机组普遍采用。
3 转速信号计算中需要注意摇摆电抗的取值
本文介绍了在国内励磁调节器中对发电机内电势Eq频率的两种常规软件计算方法,其中需要注意的是,两种方法都必须重视计算转速w信号交轴(q轴)电抗的取值。根据国内外励磁厂家的相关资料,该电抗值并不是通常所认为的同步交流电抗,其电抗值应介于Xq与X'q之间,称为“摇摆电抗”。摇摆电抗为系统发生波动或原动机功率调整时,导致发电机转子摇摆过程中产生的变化电抗,其数值远小于发电机稳态交轴电抗值,但大于暂态时发电机交轴电抗。根据相关资料,摇摆电抗计算公式如下所示:
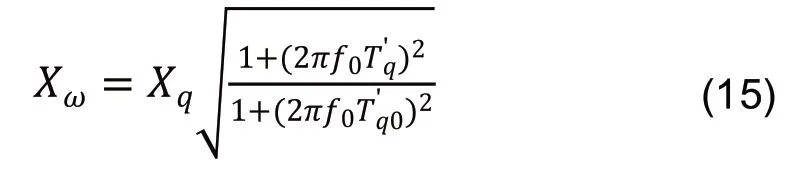
式(15)中:Xq为同步交轴电抗;f0为本机摇摆频率;T'q为短时交轴瞬变时间常数;Tr0为开路交轴瞬变时间常数。
而在实际工程应用中,由于系统发生功率波动时发电机组的摇摆频率是一个变值,导致无法固定机组的摇摆电抗数值,因此上述方法求解的摇摆电抗只是一种近似的计算方法。由此可见,影响机组PSS功能充分发挥的关键是对机组摇摆频率及摇摆电抗的取值,这是试验时PSS参数整定过程中必须重视的问题。
4 仿真及分析
为验证摇摆电抗不同取值对PSS功能发挥的差异,基于单机无穷大系统进行分析,分别采用次暂态交轴电抗X'q和式(15)计算出的电抗值进行仿真计算,对不同电抗值下PSS的性能进行比较。
本文在Simulink中搭建单机无穷大系统仿真模型如图5所示。
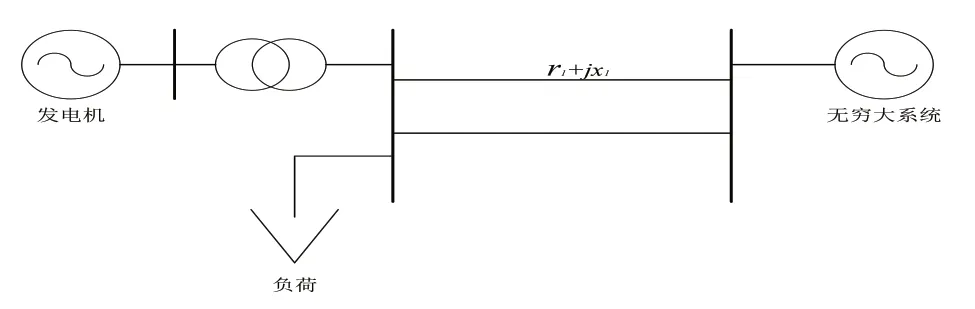
图5 单机无穷大系统仿真模型
发电机参数:P等于310MW;Un等于16kV;f等于50;Xd等于2.030;X'd等于0.284;X''d等于0.272;Xq等于1.990;X'q等于0.438;X''q等于0.236;X1等于0.194。
电网参数:变压器变比为16/242;电网电压为230kV。
励磁系统参数:Tr为 0.002;Ka为100;Ta为0.01;Kf为0.01;Tf为0.1;Tf限幅幅值为9.85。
PSS参 数:T1为0.25;T2为 0.20;T3为 0.09;T4为0.02。
试验分别在不同交轴电抗参数下设置 2%机端电压波动,所得仿真分别为图6、图7所示。
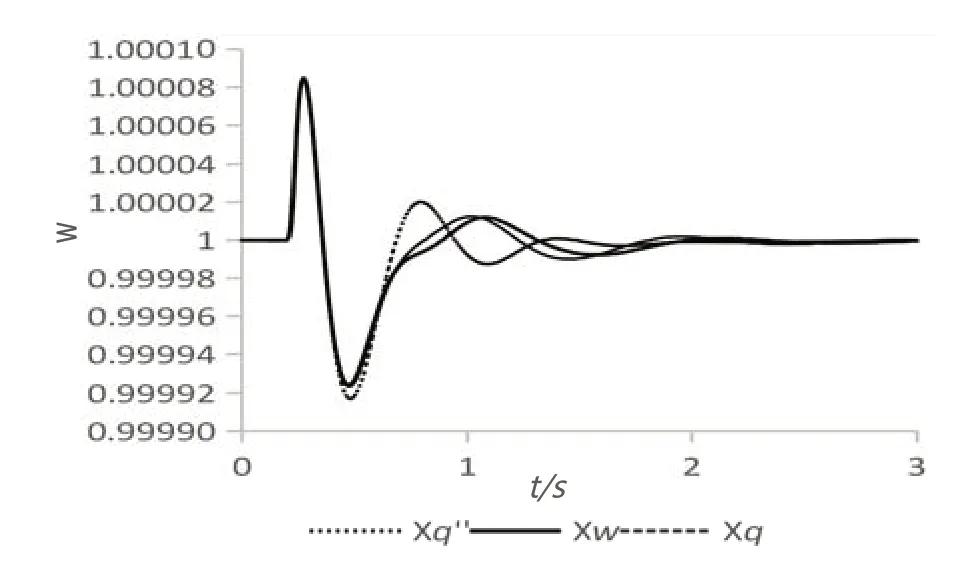
图6 采用不同交轴电抗仿真计算转速关系

图7 采用不同交轴电抗仿真计算有功功率波动
从图6、图7可见,不同交轴电抗在实际运行中对PSS功能发挥差异较大,用式(15)所得的交轴电抗 及采用机组次暂态交轴电抗 均可以让PSS功能发挥较好的效果;而直接采用交轴同步电抗 后,机组仿真中因角速度计算不准确,反而降低机组的阻尼比甚至产生负阻尼,影响机组安全稳定性。所以在实际试验过程中,交轴电抗的取值必须谨慎,应按照式(15)求得 ,亦可以近似采用次暂态交轴电抗。
5 结语
目前,我国电力系统广泛采用微机励磁系统并投入电力系统稳定器,但在《电力系统稳定器整定试验导则》中,对交轴电抗的取值方法还没有明确标准,因此必须引起电气专业人员的重视。在现场PSS2A/2B型稳定器参数整定试验过程中,必须关注交轴电抗值的正确性,而目前PSS试验中尚无能准确验证的可靠方法。如果试验时参数整定不合适,交轴电抗值设置过小,会降低PSS调节的效果;交轴电抗值设置过大,导致机组动态过程中计算的角速度不准确,在发生电力系统振荡时叠加至PSS产生负阻尼,发生功率振荡。
