陆地生态系统碳监测卫星多载荷替代数据海南综合试验
2021-10-08刘迎春吴发云孙忠秋付安民高金萍高显连高剑新崔晨彦
刘迎春,吴发云,孙忠秋,付安民,高金萍,高显连,高剑新,崔晨彦,晁 智
(国家林业和草原局调查规划设计院,北京 100714)
1953年林业部组建了西南、西北空中视察队,对云南、四川、祁连山、新疆等地进行了航空视察。1954年建立了航空测量调查大队,到1960年之前,对大小兴安岭、秦岭、湖北、云南、四川、江西、新疆等地进行了约70万km2的航空调查。通过空中目视判读像片缩略图,记录优势树种、龄组、地位级、疏密度等,求算蓄积量。1975—1990年间,借助全色和彩色红外航空像片,在黑龙江、云南、广东等地尝试建立航空像片林分蓄积量表[1]。1990—2010年,采用Landsat,SPOT影像作为底图,通过人工判读勾绘森林分布。2010—2020年,以ZY-1(02C)和ZY-3国产卫星2.5m和5m分辨率影像为主体,建立起森林资源调查监测“一张图”,实现了林地精准落界[2]。通过影像判读能够获得森林面积,但对森林蓄积量等定量因子的评估具有很大局限性。而激光雷达(LiDAR)技术的发展,为定量评估森林蓄积量和生物量提供了有效途径[3-4]。
陆地生态系统碳监测卫星(简称陆地碳卫星)于2015年1月纳入《国家民用空间基础设施建设中长期发展规划(2015—2025年)》,计划于2022年4月发射。该星由航天科技集团牵头研制,国家林业和草原局为牵头主用户,负责实施激光雷达、多角度多光谱影像、超光谱影像的林业应用工作。为发展陆地碳卫星估算森林高度、蓄积量、生物量等模型,国家林业和草原局调查规划设计院相继在东北苇河林业局、湖南西北部、东北虎豹国家公园、福建武夷山国家公园开展了机载大光斑激光雷达、机载小光斑激光雷达和地面调查试验,开发了激光雷达波形分解算法,生产了1m高精度数字高程模型(DEM)、数字表面模型(DSM)、冠层高度模型(CHM)和0.2m数字正射影像(DOM)。
2020年3月20日至2021年2月21日在海南热带雨林国家公园开展的天空地综合试验,是首次在同一区域运用机载大光斑激光雷达、小光斑激光雷达、可见光近红外相机、超光谱相机替代陆地碳卫星载荷,结合天基数据和地面调查,实现机载设备检校,林业产品算法优化和产品生产,以及林业应用潜力评估等多目标的综合实验。
1 试验区及数据获取
1.1 试验区简介
海南热带雨林国家公园保存着我国最完好、连片面积最大的热带雨林,是国家公园体制试点第五个试点,主体位于海南岛中部山区,东起吊罗山国家森林公园,西至尖峰岭国家级自然保护区,南自保亭县毛感乡,北至黎母山省级自然保护区,总面积约4 900km2,约占海南岛陆域面积的七分之一。试验区高程分布范围100~1 876m,海拔超过 1 400m的山峰有7座。气候类型为热带海洋性季风气候,年均气温22.5~26.0℃,多年平均降雨量为1 759mm,是南渡江、昌化江、万泉河等海南主要水系的发源地。每年5—11月为雨季,每年12月至次年4月为旱季。阔叶混交林(Mix broad leaved forest)、橡胶(Heveaspp.)、桉树(Eucalyptusspp.)、相思(Acaciaspp.)、国外松蓄积量共占全省森林的95.4%[5]。
检校场位于海南省儋州市西庆镇西庆机场。机场周边地势平坦,以三叶橡胶(Heveabrasiliensis)人工林为主。机场内以草地、跑道和裸地为主。西庆镇驻地有比较规整的居民区、学校等场地,适合开展大光斑激光雷达系统和超光谱相机系统几何检校工作。
1.2 全国林草资源调查机载平台
全国林草资源调查(National Forest and Grassland Inventory,NFGI)机载平台主要包括3套机载设备:机载大光斑激光雷达(NFGI Airborne Large-footprint LiDAR,NFGI-LIDAR-L)、机载小光斑激光雷达(NFGI Airborne Small-footprint LiDAR,NFGI-LIDAR-S)、机载超光谱相机(NFGI Airborne Ultra-spectrum camera,NFGI-SPECTRUM-U),以及数据处理软件、工作站和服务器(图1)。

图1 全国林草资源调查机载设备
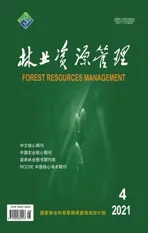
NFGI-LIDAR-L按照陆地碳卫星指标研制,主要由大光斑激光雷达系统、航空摄影系统(可见光相机Phase One iXM-100)、位置和姿态系统(高精度惯性分体式组合导航系统Novatel SPAN ISA100C)、稳定平台系统(Leica PAV100)、飞行管理系统和数据后处理系统组成。NFGI-LIDAR-L的激光器发射频率40~200Hz可调,脉冲宽度3.037ns,扫描角±15°,激光发散角10mrad,波形采样间隔1ns(表1)。该系统可以在2 500m航高获取水平方向直径25m、垂直方向间隔0.15m的激光雷达波形数据[6]。
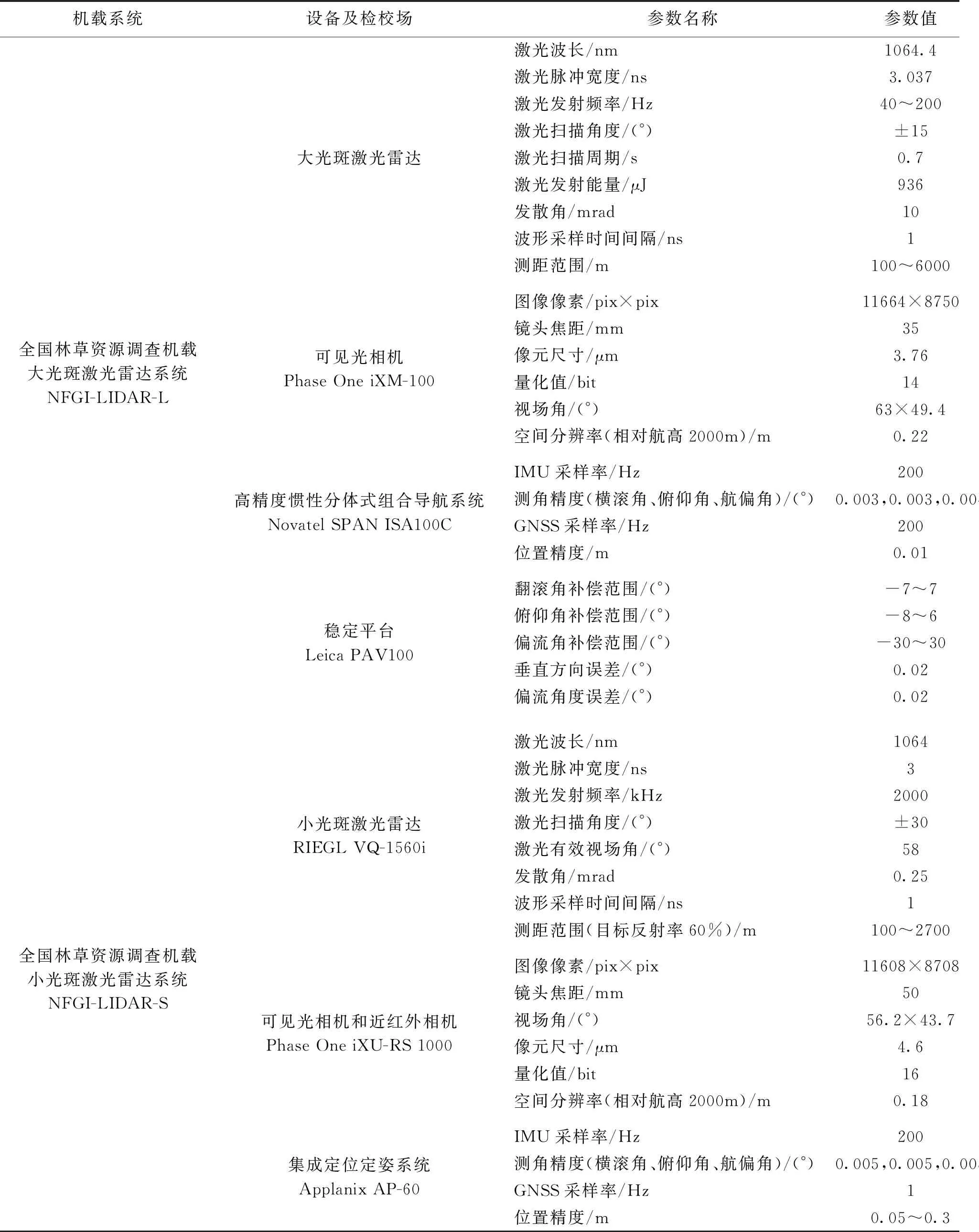
表1 全国林草资源调查机载大光斑激光雷达 机载小光斑激光雷达 机载超光谱系统参数
NFGI-LIDAR-S主要包括2个小光斑激光雷达(RIEGL VQ-1560i)、可见光相机和近红外相机(Phase One iXU-RS 1000)和集成定位定姿系统(Applanix AP-60)。森林在近红外波段的反射率为0.4~0.5之间,当反射率为0.4时,NFGI-LIDAR-S最大测距为2 300m。每个激光器最大发射频率为1 000kHz,有效视场角58°,波形采样时间间隔1ns。每个相机1亿像素(11 608×8 708),传感器尺寸53.4mm×40.0mm,配备50mm焦距镜头,视场角:56.2°×43.7°。
NFGI-SPECTRUM-U主要包括超光谱相机(AisaIBIS)、可见光相机(Phase One iXU-RS 1000)和集成定位定姿系统(GEO-FOG 3D Dual INS)。超光谱相机的传感器为1 536个电荷耦合单元(CCD)组成的推扫式线阵,一次最多成像768个像素,光谱范围670~780nm,光谱分辨率0.24nm,最大波段数1 004个,镜头焦距17.45mm。可见光相机指标跟NFGI-LIDAR-S上的可见光相机相同型号。
使用2架塞斯纳208B飞机执行航摄任务,飞机参数如表2所示。该飞机采用全自动驾驶仪保证飞行质量;配有发动机滑油引流排放系统,防止污染相机镜头;起降阶段可以关闭航测窗口,对相机起到保护作用。

表2 飞机参数
1.3 天基激光雷达
能够测量森林高度的天基激光雷达主要包括:ICESAT-1/GLAS(Geoscience Laser Altimeter System),搭载在国际空间站的GEDI(Global Ecosystem Dynamics Investigation)和国产高分7号卫星(表3)。与其他天基激光雷达相比,激光雷达是陆地碳卫星主载荷,专门为定量观测森林而设计:1)具有更多激光器(5个);2)望远镜口径更大(1m),接收更多能量;3)采用太阳同步轨道,覆盖全球森林;4)在保证8年运行寿命的同时,尽量提高激光发射频率,能够发射不低于10亿个激光点;5)同时配备惯导、星敏、光轴监视相机等设备,提高激光雷达地面位置精度;6)光斑足印直径尽量缩小到20~25m,脉冲宽度4ns,减少地面坡度和复层林对森林高度测量的影响。

表3 天基激光雷达参数
(续表)
1.4 航线设计及数据获取
海南热带雨林国家公园具有地形复杂、森林覆盖率高、阴雨天多、边界不规则、区域大等特点,导致航线设计时需要考虑:可获取的控制点较少,飞行时间受限制,影像分辨率差异大,需要划分多个分区,不宜采用东西向或南北向的平行航线,需要很多架次才能全覆盖。在综合考虑设备检校、综合试验的情况后,设计了检校场航线和测区航线(表4)。

表4 航线和载荷参数
检校场航线。1)NFGI-LIDAR-L检校航线:以2 000m和1 500m两个相对航高、240km/h航速,采用垂直交叉航线飞行,共获取6条航线数据。2)NFGI-LIDAR-S高精度地形航线:以1 030m绝对航高、250km/h航速,采用平行航线飞行,共获取3条航线的小光斑LiDAR和影像数据。小光斑LiDAR发射频率为2 000kHz,光斑地面直径0.23m。影像分辨率0.08m。3)NFGI-SPECTRUM-U检校航线:以1 350m和800m两个相对航高、225km/h航速,采用“米”字形航线飞行,共获取18条航线数据。超光谱影像光谱采样间隔0.11nm和0.22nm,波段数1 004和502,空间分辨率约为1m;可见光影像空间分辨率0.13m和0.08m。
测区航线。1)NFGI-LIDAR-L以2 200m相对航高、240km/h航速,沿着GEDI和高分七号轨迹飞行5h,共获取8条航线数据。影像分辨率为0.24m。2)NFGI-LIDAR-S以1 800m相对航高、260km/h航速,采用平行航线飞行71h,共获取217条航线的小光斑LiDAR和影像数据。LiDAR发射频率为2 000kHz,光斑地面直径0.45m,旁向重叠率22%;影像分辨率0.165m,旁向重叠率20%,航向重叠率63%。3)NFGI-SPECTRUM-U以1 320m相对航高、225km/h航速,采用平行航线飞行2.4h,共获取15条航线数据。超光谱影像光谱采样间隔0.22nm,波段数502,空间分辨率约为2m。可见光影像空间分辨率0.13m,旁向重叠率30%,航向重叠率70%。

图2 海南热带雨林国家公园综合试验机载小光斑激光雷达航线设计
航空数据获取通常包括:任务规划与设计,设备安装与调试,航飞作业,备份数据并填写航飞记录表,数据检查,补飞等环节。共开展飞行作业81h,获取超过6 000km2,3TB原始航空数据,覆盖了海南热带雨林国家公园及周边区域。
1.5 CORS数据和基站数据
海南省测绘地理信息局提供了儋州、昌江、白沙、琼中、乐东、五指山共6个CORS站数据[7],用于NFGI-LIDAR-L的3区数据和NFGI-LIDAR-S数据解算。NFGI-LIDAR-L和NFGI-SPECTRUM-U在检校场和1区飞行期间,为保障高精度快速解算数据,架设了采用实时动态载波相位差分定位技术(Real-Time Kinematic,RTK)的基站。
1.6 控制点和检查面调查
在海南热带雨林国家公园及周边共布设214个控制点和检查面(图3),在西庆机场和西庆镇共布设39个控制点和12个高程检查点。控制点通常位于道路交叉口、斑马线。检查面为100m范围内设置15个检查点,用于检查LiDAR平面和高程精度。其中,平面精度检查点选择有垂直高差的平房4个房角和房角-地面交叉点;高程检查点选在平坦区域,比如马路。精度要求:平面精度一般应控制在0.05m内;信号较差的地方,平面和高程误差分别不超过0.1m和0.05m。

图3 海南热带雨林国家公园控制点和检查面分布
1.7 地面激光探测器数据
在检校场,按照5m×5m间隔布设了100个地面激光探测器,用于机载大光斑激光雷达几何检校。探测激光能量密度的范围为0.05~1.00 nJ/cm2,按照能量密度线性划分4 095个等级。探测激光的中心波长为1 064nm,频率高于200Hz,记录接收到激光的能量和时间。在航飞前后,用全站仪多次测定探测器的位置,精确到1mm。地面激光探测器接收GPS时间,并与GPS时间同步。
1.8 地面调查样地布设和调查方法
以海南省5个主要林种(阔叶混、橡胶、桉树、相思、国外松)以及3个南方主要林种(杉木、针叶混、针阔混)为调查对象,按照3个郁闭度级、5个树高级,在海南热带雨林国家公园布设170个直径30m的圆形样地。通过RTK测量样地中心位置和每棵树的位置,调查森林起源、龄组、优势树种。记录每木树种,通过每木检尺得到每木胸径。使用激光测距仪测量每木最大高、枝下高、冠幅等信息[8]。
2 系统检校和数据处理
2.1 POS数据处理
POS数据一般处理流程为:首先对POS原始数据进行解压,分离出机载GPS数据与IMU惯导数据,然后结合地面GPS基站或CORS站数据进行差分处理,最后利用差分成果与IMU数据联合解算,求解出激光发射时刻或影像曝光时刻的定向定位数据。NFGI-LIDAR-L和NFGI-SPECTRUM-U在Inertial Explorer 8.8中解算POS数据。NFGI-LIDAR-S在POSpac 8.3软件中解算POS数据。
2.2 NFGI-LIDAR-L检校和数据处理
基于地面激光探测器得到的激光能量分布特征改进探测器法,对NFGI-LIDAR-L的大光斑LiDAR进行几何检校。NFGI-LIDAR-L在x,y,z方向精度和总均方根误差(RMSE)从检校前的60.51,52.76,1.88,80.30m提高到检校后的0.61,0.54,0.05,0.82m,提升了2个数量级[6]。通过室内检校和挂飞检校,对NFGI-LIDAR-L的相机进行几何检校,检校后的x,y方向中误差均低于0.5个像元。
从原始激光雷达和解算后的POS数据,按照临近时间插值法提取POS和LiDAR数据,将十六进制数据保存为可直接打开的十进制数据。根据POS、检校参数、激光测距和波形信息解算大光斑LiDAR波形最大值位置;将位置和波形保存为波形产品;通过波形分解得到波形参数。
2.3 NFGI-LIDAR-S数据处理
在试验前,已在吉林完成NFGI-LIDAR-S系统检校。小光斑LiDAR数据处理完成以下4步:1) 将解算的POS数据导入到RiProcess 1.8.5中,并做小光斑LiDAR位置解算,生产5m DSM;完成航飞和点云质量检查,将结果反馈给航飞组,用于决定是否重新获取数据。
2) 航带几何纠正。将构架线和连接构架线的航带抽出,组成构架线网。用控制点校正构架线网,再用构架线网和控制点校正各架次的航带数据。最后,做相邻架次航带数据匹配,得到几何纠正后的小光斑LiDAR。检查航带匹配相对位置精度和绝对位置精度。用可见光和近红外影像对小光斑LiDAR赋色,并按照1∶2 000分幅对小光斑LiDAR分块。
3) 通过自动分类、手工去云、识别地面、分类结果更正等步骤,生产小光斑LiDAR分类产品。该产品分为6类点:未分类、地面、高植被、建筑物、低点及存放待删除点的reserve11(表5)。

表5 小光斑激光雷达分类定义
4) 生产DSM,DEM和CHM产品,并检查更正极端值和异常值。其中,DSM从未分类点、地面点、高植被点、建筑物点生产;DEM从地面点生产;CHM从高植被点和地面点生产。
2.4 机载可见光和近红外影像处理
使用Capture one将影像从IIQ转换为TIFF格式,用单张影像和生产的快拼图,检查航飞质量和影像质量。制作对应的色调模板,在保证像片纹理细节信息不丢失、无过度曝光现象、色彩平衡的前提下,对影像做匀光匀色处理。
空中三角测量。对影像进行自动匹配,生成高精度连接点。对于点位不足区域,人工添加连接点。在像片上量测外业控制点,通过光束法区域网平差,剔除粗差点,得到高精度空中三角测量成果。
DOM生产。结合空三加密成果和机载激光雷达点云生成的DEM,对单张影像进行正射纠正,生成单张DOM。采用先存储镶嵌线,再做像片整体接边的方法,生产整体DOM。即同时完成整体匀光匀色、几何接边和色彩过渡等工作。最后经过人工修片和整饰,生产全区域DOM;分幅裁切,生成1km×1km分幅DOM成果。
2.5 NFGI-SPECTRUM-U检校和数据处理
超光谱相机检校主要有两个过程:一个是在出厂前进行的辐射标定;另一个是挂飞检校时做的几何检校。几何检校的方法是在超光谱影像上选择连接点,计算相机视轴与惯导之间的检校参数(俯仰角、翻滚角和偏航角)。除此之外,还在做过几何纠正的可见光影像上选取地物点作为控制点,对超光谱影像做几何纠正。跟控制点相比,超光谱影像在x和y方向的无控精度分别为0.19m和0.46m。跟可见光影像相比,超光谱影像在x和y方向的精度分别为0.16m和0.16m。
超光谱影像处理。在CaliGeoPRO V2.2.19软件中,用辐射校正文件(.cal)、解算后的POS文件、高精度DEM,对超光谱影像做辐射校正和几何校正,生产1m超光谱辐亮度影像。
2.6 地面调查数据处理
用地面调查数据计算样地优势木平均高、算术平均高、胸高断面积加权平均高、样地最大高。用已发表的立木材积表和异速生长方程[9],计算立木材积和每棵树的生物量,并换算为样地的蓄积量和生物量。
3 综合试验产品
3.1 机载大光斑激光雷达产品
NFGI-LIDAR-L原始数据103GB,LiDAR位置解算产品400MB,含位置的波形产品19GB,波形参数产品500MB。大光斑激光雷达绝对高程精度0.10m。大光斑激光雷达与检校点的高程差未出现随距离或激光扫描角度的增大而增大的现象。与高精度DEM相比,大光斑激光雷达得到的裸地和跑道、草地、农田、森林等地面高程均方根误差分别为0.13,0.15,0.38,0.58m[6]。
3.2 机载小光斑激光雷达产品
小光斑LiDAR原始数据3.5TB,分航带几何校正产品4.6TB,分幅产品4.4TB,分类产品共4.45TB。用263个地面检查点,得到小光斑激光雷达高程精度为0.08m。通过抽取54个直径30m样圆评估植被分类正确率达到99%。1m分辨率DSM,DEM,CHM产品覆盖国家公园及周边区域如图4、图5所示。通过244个地面检查点评估DEM中误差为0.15m。通过100个调查样地的森林最大高评估CHM精度达到91.8%。

图4 机载小光斑激光雷达1m DEM产品

图5 机载小光斑激光雷达1m CHM产品
以样地中心为圆心,从人工分类点云切出170个50m直径样圆点云,并生产了归一化产品。生产了覆盖国家公园的25m分辨率LAI、郁闭度、森林高度、株密度等产品。
3.3 机载可见光和近红外影像产品
机载可见光和近红外原始影像3.5万张。分辨率0.2m,覆盖尖峰岭、霸王岭、鹦哥岭、黎母山、五指山、毛瑞、吊罗山7个区域5 064幅1km×1km分幅DOM和整幅DOM(图6),共计3TB。通过48个地面检查点评估DOM产品的x,y方向偏差分别为0.137m和0.124m。影像纹理特征明显,没有扭曲拉花现象。

图6 尖峰岭天池(上)和大广坝水库(下)正射影像产品
3.4 机载超光谱影像产品
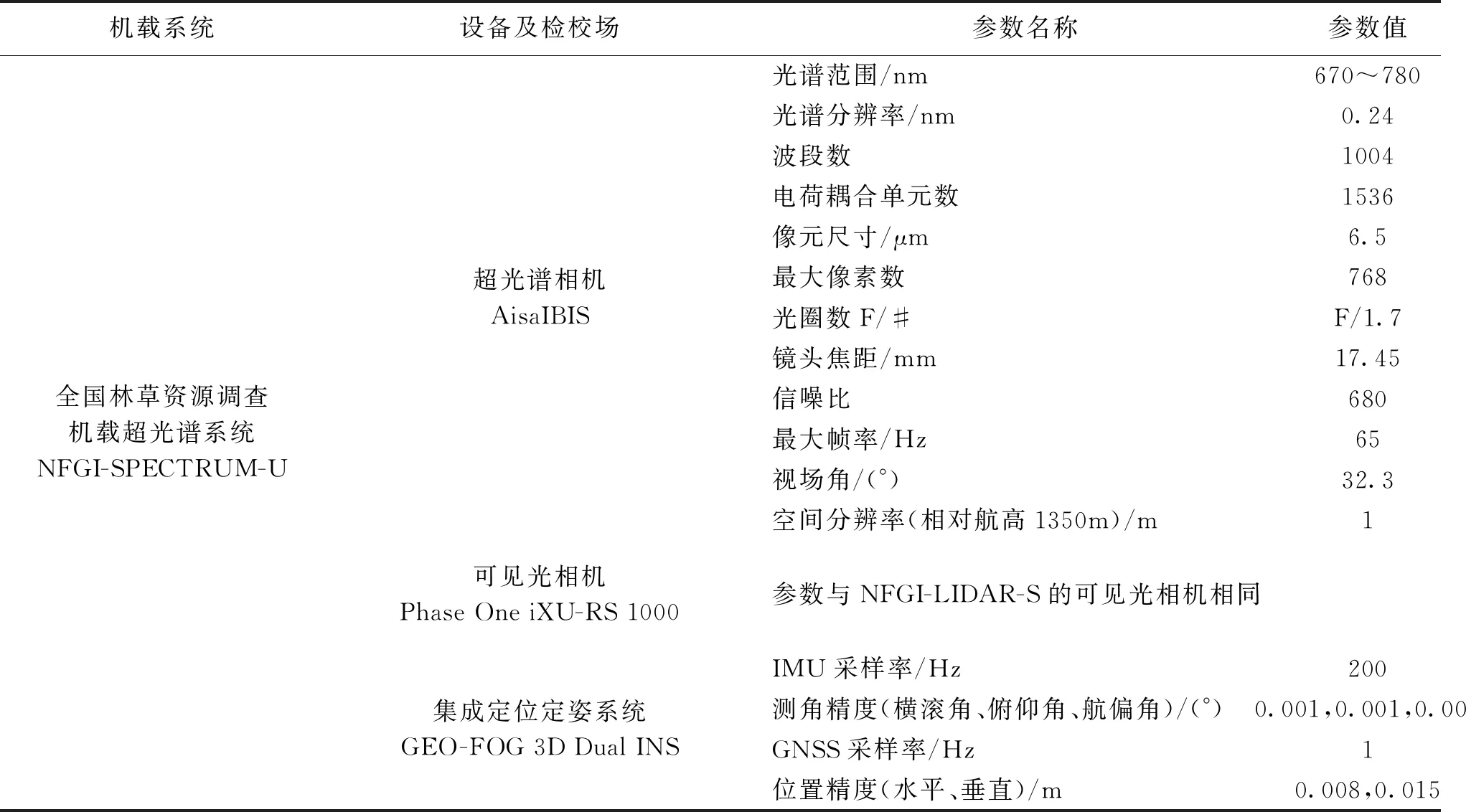
机载超光谱原始影像和产品共计300GB。超光谱各波段间匹配精度在0.5个像元以内。以DEM纠正并重采样后的影像消除了扭曲拉花现象。辐亮度的空间分布趋势与地物真实情况总体一致;超光谱影像得到的森林波谱曲线与波谱仪结果相似(图7)。由于受太阳角度影响,还存在西部总体高于东部的现象。
图7 机载超光谱影像及波谱曲线
4 结论
作为首次开展的陆地碳卫星多载荷替代数据综合实验,探索了大光斑激光雷达几何检校方法和精度检验方法,对NFGI-LIDAR-L和NFGI-SPECTRUM-U进行了系统检校,精度达到预期目标,能够基本满足林业应用需求。截至2021年7月,已经开展81h飞行作业和一年半的数据处理,生产国家林草资源机载平台基础产品20TB。产品精度评估认为,大光斑激光雷达高程精度为0.10m,小光斑激光雷达高程精度为0.08m,植被分类正确率达到99%,DEM高程精度为0.15m,CHM精度为91.8%,DOM的x和y方向精度分别为0.137m和0.124m,超光谱影像检校精度在0.5个像元以内。
与云南腾冲遥感试验、黑河综合遥感联合试验、滦河遥感综合试验相比[10-11],本次综合试验更注重以机载数据替代陆地碳卫星数据,评估林业产品生产精度和林业应用的可能性。未来将进一步结合天空地数据,比较天基激光雷达与NFGI-LIDAR-L波形差异,波形数据与小光斑激光雷达数据间差异;探索激光雷达林业应用边界;生产森林高度、株密度、叶绿素荧光、总初级生产力、蓄积量、生物量等林业产品,为行业应用提供高质量的数据产品。
致谢:本次综合试验得到了海南西庆机场、湖南省林业调查规划设计院、上海大恒精密机械有限公司、中测瑞格测量技术(北京)有限公司、海南心愿实业有限公司、海南测绘地理信息局、山东科技大学、安徽建筑大学大力支持和诸多帮助,国家林业和草原局调查规划设计院于慧娜、姬路坤、马静怡,北京工业大学郑子阳、王天,东北林业大学蔡龙涛参加数据处理,在此一并表示感谢。