基于改进人工势场法的智能汽车超车轨迹规划策略
2021-10-04余政
余政
(201620 上海市 上海工程技术大学 机械与汽车工程学院)
0 引言
根据中国统计年鉴显示,由于驾驶员的不安全驾驶操作造成的交通事故占事故总数的69%[1]。各国都在致力于研究发展智能汽车,实现辅助甚至代替人类进行安全驾驶[2]。其中,智能汽车的核心技术之一就是行驶轨迹规划与跟踪。
超车安全约束条件和路径规划控制算法是超车路 径规划研究的重点。在有关研究中,王树凤[3]等提出新型障碍物虚拟力场作用域,引入基于前车工况的斥力系数和调节因子,设立虚拟局部目标点,建立了改进的路径规划模型;单晓峰[4]等提出了双车道公路超车行为的两难区域概念,建立超越多车视距模型,并给出不同车队规模下安全超车的速度限制和视距要求;韩宇洪[5]针对传统人工势场法缺陷引入车辆与目标的距离作为调节因数,基于安全椭圆理论的车辆碰撞危险系数的计算方法,将此系数引入道路人工势场法的斥力函数中,建立动态道路人工势场法;吴乙万[6]等提出态虚拟障碍物模型,通过汽车的行驶状态对危险性进行评估,在满足运动学及动力学约束条件下进行实时动态避障;Shi P[7]等分别在引力、斥力势场中加入智能汽车与障碍物、目标点之间的距离;Raja R[8]在原函数中引入梯度函数,确保汽车一直沿着低梯度函数方向行驶。为确保汽车避障实时性以及动态避障,Choe T S[9]在斥力势场的基础上建立了虚拟转向势场,可实时修正汽车的行驶状态。
目前对于在动态环境下轨迹规划的研究还比较少,并且在路径跟踪控制方面对动力学约束条件的考虑还不够完善,建立轨迹跟踪控制器的方法比较复杂,效果也不是特别理想。本文以单向双车道超车行为为研究对象,分析了驾驶员在超车时的驾驶行为,建立安全超车约束条件。依据超车行为约束条件,对传统人工势场法的势场函数归纳后,发现人工势场法存在无法到达目标点以及局部最优的缺点,通过改变斥力势场函数以及对建立斥力角旋转对人工势场算法进行改进,并在Similink/CarSim 对改进后的人工势场算法进行联合仿真分析,验证改进人工势场算法的有效性。
1 双车道超车模型
1.1 安全超车特性分析
根据图1,为更好地规划智能车超车轨迹,需分析驾驶员超车行为特点[10]。智能车超越车队时由以下步骤组成:
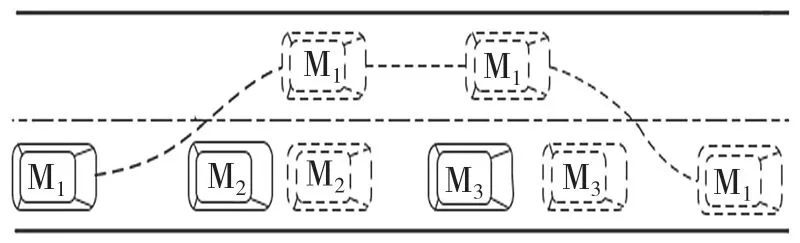
图1 超车过程车辆位置关系Fig.1 Vehicle position relationship during overtaking
(1)跟随过程:M1加速至与车队下游车M2速度相近,保持与前车安全距离靠线行驶,并观察前方车流量。
(2)加速借道:加速行驶,超越M2,并在超车道上行驶直至超越车队上游车M3一定距离。
(3)匀速超车:M1保持匀速超越M3,并返回原车道,完成超车时,M1与M3保持一定安全距离。
1.2 安全超车模型建立
根据图2,保证辆车不发生碰撞的条件为
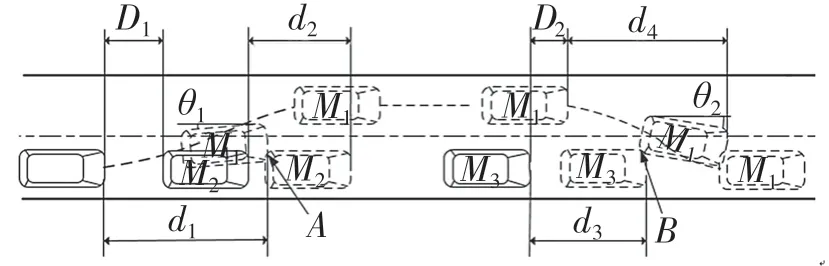
图2 车辆超车避障示意Fig.2 Vehicle overtaking and obstacle avoidance signal

式中:d1,d2——借道时车辆M1和M2经过时间t1的纵向位移;d3,d4——超车时车辆M1和M4经过时间t2的纵向位移;DH——M1的长度;θ1,θ2——t1,t2时刻M1与车道线之间的夹角;t1,t2=[tb,te]——借道和超车过程所耗时间;tb——车辆M1借道和超车的开始时刻;te——车辆M1借道和超车的结束时刻。
由式(1)可以得出,M1不与其他车发生碰撞的最小纵向安全空间为

式中:v1(tb),v2(tb)——借道和超车开始时刻M1的纵向速度;v1(te),v2(te)——借道和超车t1时刻的纵向速度;a1,a2——借道过程中车辆M1和M2在t1时刻的纵向加速度;a3,a4——超车过程中车辆M1和M2在t2时刻的纵向加速度。
利用人工势场法得到的车辆超车轨迹,除了对障碍物的空间约束,还应该对道路几何、车辆自身动力学约束。aym为M1最大侧向加速度,vm为道路限速,H 为单车道宽度。
2 基于人工势场的超车路径规划
为满足超车过程中的各种约束条件,使规划出的超车轨迹更加贴近实际,对传统人工势场法进行改进。
2.1 传统人工势场法
人工势场就是抽象地描述了智能汽车的行驶环境。根据探测到的周围环境信息,算法构建出斥力势场和引力势场,分别对应不同的势能。对于智能汽车轨迹规划问题,考虑由要到达的目标点对汽车产生引力作用,而周围的各种障碍物对汽车产生斥力作用,智能汽车在这样一个由引力、斥力势场形成的虚拟复合势场中运动。
其中,斥力、引力由引力势场负梯度计算而得

式中:q——智能车位置坐标;qg——目标点位置坐标;katt——引力常数;ρ(q)=││q-qg││——智能汽车与目标点的欧几里得距离;η——距离斥力常数;ρ0——斥力势场作用距离;ρc(q)=││q-qc││——矢量,是汽车与障碍物的欧几里得距离。
智能汽车在行驶时受到目标点与障碍物对它产生的合力表达式为

2.2 改进的人工势场法
传统人工势场法虽然方法简单,计算速度快,但却存在目标点无法到达及局部最优的问题。目标无法到达的主要原因在于目标点与障碍物的距离过近;局部最优问题产生的原因主要是因为汽车受到的斥力和引力在同一条直线上,或者夹角很大,几乎在同一条直线上。针对目标不可达问题引入调节因子n,使得汽车顺利地到达目标点。新的斥力势场为

式中:n ——调节因子,0 ≤n ≤1;ρ(q,qg)=——矢量,是增加调节因子后汽车与目标点之间的欧几里得距离。同样的,改进后的斥力可由斥力势场的负梯度计算而得
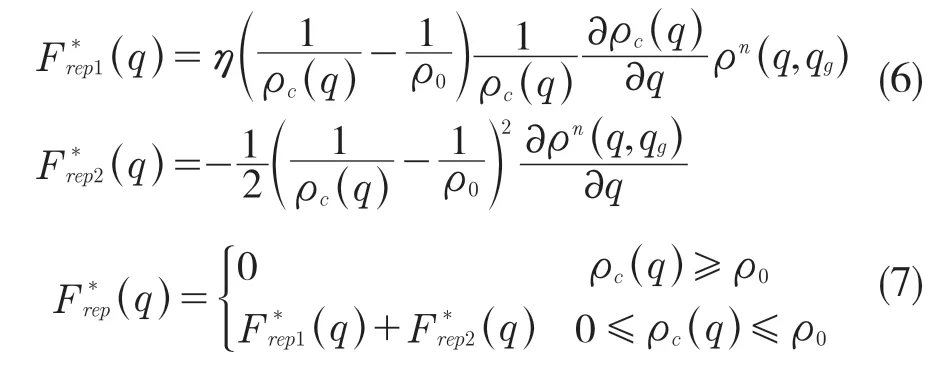

图3 智能汽车受力Fig.3 Force of intelligent vehicle
改进后的的斥力势场函数保证了目标点的势场始终处于全局势场最小值,智能汽车能沿着低势能行驶到达目标点。其中,调节因子n 有效地起到调节斥力大小的作用,所以n 对整个斥力势场起着举足轻重的作用。
当n=1 时,ρn(q,qg)=ρ(q),则若智能汽车处于斥力作用范围内,改进后的斥力表达式为

当智能汽车与障碍物距离很近的情况下,随着汽车向目标点地运动,ρ(q)→0,则F*rep1(q)→0,另一个斥力分量F*rep2(q)→定值,此时的斥力合力仅为F*rep2(q),并且方向背离障碍物,在人工势场总合力的作用下汽车可以安全地到达目标点。
当0<n<1 时,势场函数U*rep(q)在目标点处不可微,若智能汽车处于斥力作用范围内,改进后的斥力表达式为
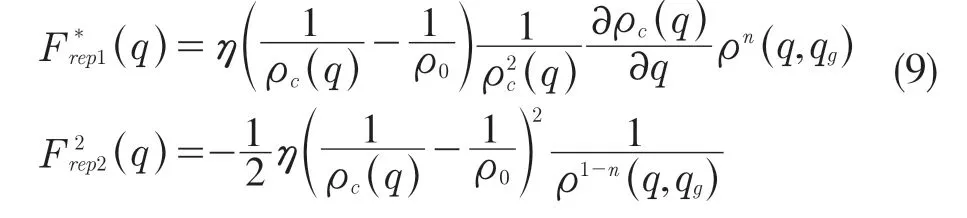
随着汽车向目标点地运动,ρ(q)→0,则F*rep1(q)→0,另一个斥力分量F*rep(2q)→无穷大,此时的斥力合力仅为F*rep2(q),并且方向背离障碍物,在人工势场总合力的作用下汽车可以安全地到达目标点。
针对局部最优问题,只要在原来受力的基础上,给汽车所受的斥力进行一定角度的旋转,使汽车受到的斥力与吸引力不在同一条直线上即可。
对斥力旋转的角度不能太大也不能太小,太大可能会使智能汽车偏离预期轨迹行驶,撞上障碍物而不能到达目标点,太小可能对整个斥力势场的改变不起作用,要选择一个适当的角度,经过在MATLAB 中的多次仿真试验,12.5°可以实现算法的最优实现。
在程序中,对斥力方向的旋转比较好实现,只要在其与X 轴的夹角的基础上再减去12.5°。旋转如图4 所示。

图4 旋转斥力Fig.4 Rotation repulsion force
2.3 动态环境复合势场
汽车右边缘至道路右边界的距离为yi,汽车的车宽为B,则汽车质心坐标为(xi,yi+B/2),根据人工势场原理,道路边界斥力势场的斥力可由对势场模型进行负梯度运算得到

为了避免与周围的运动障碍物碰撞,应对传统人工势场的斥力势场进行完善,考虑在斥力势场中加入智能汽车与障碍物之间的相对速度因素

动态环境中,汽车受到各种斥力与目标点对其产生的引力总和为

在引力势场、道路边界斥力势场、障碍物斥力势场和速度斥力势场组成的复合场中,汽车受到复合场力的作用,如图5 所示。假设在道路坐标系中,汽车每个质心位置只沿Y 方向运动,类似于算盘上的算珠,当Y 方向受力达到平衡,即

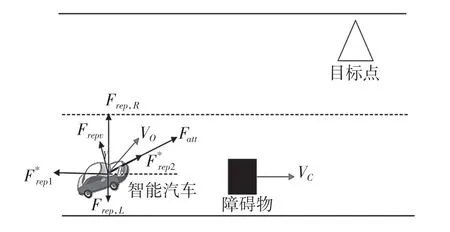
图5 智能汽车受力Fig.5 Force of intelligent vehicle
考虑智能汽车在转向时的稳定性,在超车轨迹规划中引入转向操作系统来驱动车辆转向,保证车辆行驶的稳定性。以稳态横摆角速度增益来评价转向操作系统的平稳性,其表达式为

式中:R——车辆转向半径;δf——汽车前轮转向角;L——汽车轴距;u——汽车速度;K——稳定性因数。
3 复合总势场中轨迹规划仿真
假设汽车行驶的道路为宽为3.75 m 的单向双车道,为保证超车的安全性,设置车队车辆数N=2,车速40 km/s 来验证轨迹跟踪的稳定性。控制器的参数设置见表1。

表1 控制参数取值Tab.1 Control parameter values
仿真结果如图6—图8 所示。图6 为超车横向加速度。由于超车过程中的横向加速度曲线不存在阶跃,因此保证了整个超车过程的平稳性,并且加速度曲线峰值小于1 m/s2,也满足车辆动力学约束条件。
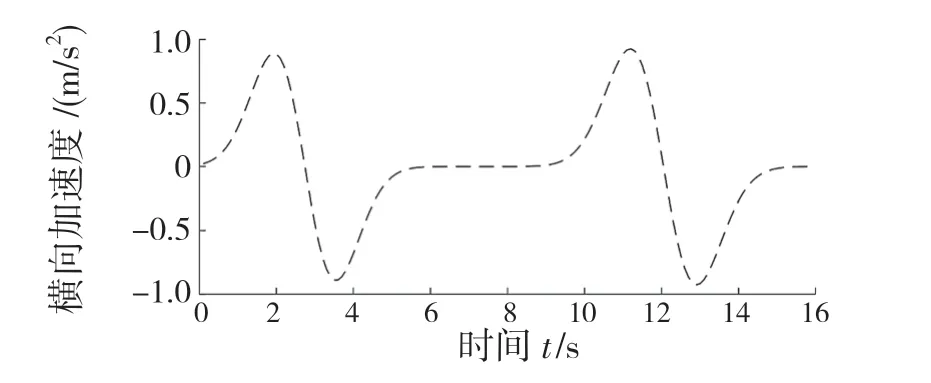
图6 超车横向加速度Fig.6 Lateral acceleration of overtaking
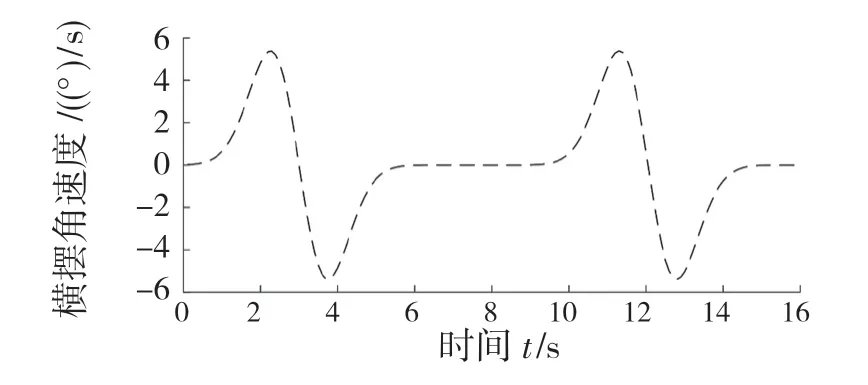
图7 超车横摆角Fig.7 Overtaking yaw angle
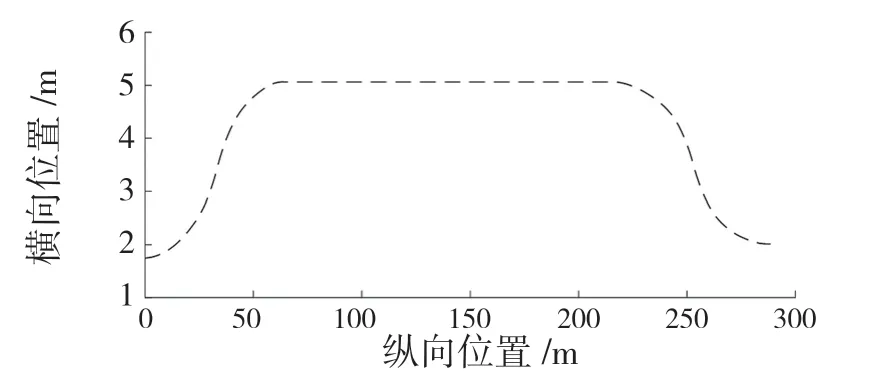
图8 超车轨迹Fig.8 Overtaking trajectory
图7 为超车横摆角。超车横摆角速度随着超车过程中两次换道平稳变化,变化值均在合理范围内。图8 为超车轨迹。超车开始、结束和并道阶段的运动方向与车道线保持水平,同时整个超车过程满足舒适性和安全性。
综合以上分析,基于改进人工势场法规划出的超车路径满足安全超车空间、道路几何和动力学约束条件,符合智能车辆超车需求,达到预期目标。
4 结语
本文以智能汽车单向双车道超车行为为研究对象,分析了驾驶员在超车时的驾驶行为,建立了安全超车约束模型。结合超车过程中车辆间的位置关系,通过改变斥力势场函数以及建立斥力角旋转对人工势场算法进行改进,建立复合斥力势场。模拟汽车现实行驶交通环境,结合车辆动力学约束条件,实现智能汽车在动态环境下超车路径规划决策,解决了传统超车模型存在的不足。仿真结果表明,改进人工势场法在规划超车路径模型的有效性,保证了超车行为的安全性和稳定性。
本文以单向双车道超车模型为研究对象,整个超车过程中障碍车都保持匀速运动,没有考虑障碍车速度的突变情况。后续研究将对单向双车超车道模中的型障碍车突变进行进一步讨论。
