基于物理层网络编码的无人机中继网络资源优化
2021-09-28杨君一李博张钦宇
杨君一,李博,张钦宇
(1.哈尔滨工业大学(深圳)电子与信息工程学院,广东 深圳 518055;2.哈尔滨工业大学(威海)信息科学与工程学院,山东 威海 264209)
1 引言
无人机(UAV,unmanned aerial vehicle)通信是5G 蜂窝网络中的新兴技术。近年来,无人机技术取得了空前的进步,这使将无人机广泛部署作为通信基站或中继器成为可能[1-2]。特别是当其部署和操作适当时,无人机可以为各种实际情况提供可靠且经济高效的无线通信解决方案,如在抗震救灾等特殊场合[3]。当无人机用作中继站或基站时,可以支持现有地面无线网络的连接。凭借其高移动性和灵活的部署,无人机可以通过调整位置来避开障碍物,并提高与地面用户建立视距连接的可能性,而且可以通过自适应高度特性在保证通信质量的同时扩大通信覆盖范围[4-6]。除了其所具有的上述优势,无人机作为中继或基站仍有许多问题值得研究。
在无人机通信中,空对地的信道建模是研究者关注的热点之一。文献[7]对低空飞行无人机平台做了综述性的调研,阐述了无人机通信中的信道建模及其主要挑战。而因为无人机电池工艺受限问题,针对无人机快速部署及电池存续时间短的特点进行资源优化仍是关键方向且已完成很多工作。目前,主流的基于半双工的无人机中继通信系统已提出了许多优化方案来优化通信系统的资源,主要通过优化现有通信系统中包含功率、频谱、无人机轨迹等在内各类资源,实现系统性能的提升,如系统中断概率、吞吐量、传输速率、保障用户服务质量(QoS,quality of service)等性能[8]。文献[9]研究了单无人机作为中继的资源优化问题,以单架无人机作为中继提供多对地面节点通信服务,通过优化带宽、传输功率、传输速率以及无人机节点布置,将原非凸的优化问题转化成了单调的凸优化问题,以实现系统吞吐量最大化。文献[10]研究了多无人机作为基站为地面节点提供服务的无线传输网络,通过优化通信网络协同调度及无人机功率和轨迹优化,提出了基于块坐标下降和连续凸优化技术的迭代算法,解决了最大化单位用户吞吐量的混合整数非凸优化问题,并提出了一种低复杂度的无人机轨迹设计算法。文献[11]研究了单无人机作为无线能量传输及通信节点,先为地面节点充能,之后地面节点消耗接收到的能量向无人机发送信息;优化了无人机的路径以及能量和信息间的时间传输分配以达到系统信息吞吐量最大,并基于01 分数规划提出了一种低复杂度求局部最优解的算法。文献[12]同样研究了单无人机的能量传输通信模型,基于松弛条件下的问题模型(无人机没有最大速度约束条件),提出了一种轨迹设计的飞行-悬停策略,以达到系统吞吐量最大,并基于此提出了联合优化下行功率及上行信息传输资源的交替连续凸优化算法,求得了局部最优解。文献[13]考虑了单无人机的能量信息传输系统,但基于公平性原则考虑,解决了最大化能量最小用户的问题。文献[14]研究了全双工的单无人机中继系统,在基于各节点最大传输功率之和有上界的限制条件下,联合设计了最优波束成形以及功率分配,以达到瞬时的最大传输速率。文献[15]研究了多载波的太阳能无人机通信资源分配优化设计,考虑了无人机太阳能收集、空气动力消耗、无人机存储能力和地面用户的通信QoS 保障。在离线条件下,通过应用单调优化获得了最优的3D 轨迹以及最优的功率和子载波分配策略,实现最大系统吞吐量;且基于离线算法设计了线上优化算法。
以上的文献大多研究无人机支持的能量信息传输网,无人机作为中继传输能量并接受信息,以此优化无人机的轨迹及功率资源,实现高能量传输效率和信息接收;而无人机多作为转发放大中继,辅助完成两用户或用户和基站之间的通信,通过优化无人机的悬停位置或功率分配实现更好的通信性能。从更宏观的角度考虑,这些优化主要针对无人机通信系统因电池原因导致的组网存活时间短的问题,提出了一系列优化策略来提高其通信效率。因此,本文拟采用物理层网络编码(PNC,physical-layer network coding)技术来提升无人机中继通信系统的通信效率。物理层网络编码技术自面世以来,就受到了广泛的关注[16],与传统的半双工多跳方案和网络编码方案相比,将PNC 技术用于双向中继信道可以分别将系统吞吐量提高100%和50%。为了通过应用物理层网络编码技术来提高无人机中继通信系统容量和通信效率也成为一些学者的关注点,而这主要存在2 个问题:1) 无人机在三维空间的高速移动性对于物理层网络编码实现同步需求是一巨大挑战;2) 在无人机中继通信系统中难以实现无人机轨迹与源节点之间的功率分配联合优化。这2 个问题的解决对于将PNC 应用于无人机中继通信网络至关重要。
本文旨在研究当PNC 应用于无人机中继通信系统提升通信效率时,满足PNC 同步性需求的初步探索和通信系统资源优化方案设计。本文研究基于4 个地面节点的典型应用物理层网络编码技术通信场景,无人机作为中继且应用物理层网络编码技术实现两对地面节点的信息交换。本文在考虑满足应用物理层网络编码同步性需求的限制条件下,提出了一种联合优化无人机轨迹及无人机和源节点间总功率分配的交替联合优化算法,实现了通信系统性能的提升。
本文主要的研究工作如下。
1) 建立了以无人机作为中继的四地面节点物理层网络编码无人机资源优化模型;最小化系统中断概率以提升系统性能,并满足无人机最大速率约束、物理层网络编码同步性约束和最大总功率上限约束。该问题是一个非凸问题,很难直接求得解析解。
2) 将原问题进行解耦变形,分解为2 个子问题,利用拉格朗日对偶法、梯度下降法及凸函数的性质,将子问题转化为凸优化问题,证明了其凹凸性,并基于KKT(Karush-Kuhn-Tucker)条件求得了其解析解,本文给出了其计算步骤及算法。
3) 仿真结果验证表明,所提算法对无人机轨迹设计及功率分配具有良好的效果,与固定位置下的2 种功率分配算法相比,可以显著提高通信系统性能,降低中断概率。
2 系统模型
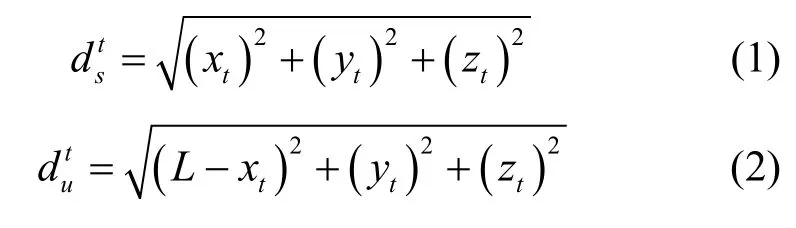
基于物理层网络编码技术的无人机中继通信系统模型如图1 所示,其中,S1、S2为地面源节点,D1、D2为地面目的节点。S1要向D2发送信息,S2要向D1发送信息,但都没有直达链路,因此需要通过无人机中继转发,且4 个地面节点是中心几何对称的。假设一共含N个通信时隙,在时隙t,S1将信号发送给UAV 和D1,S2将信号发送给UAV 和D2;在时隙t+1,UAV 将经过物理层网络编码后的叠加信号发送给D1和D2,D1和D2再通过各自在t时隙接收到的信息解码出各自需要的来自S2和S1的信息。令L表示S1和D1间的距离,同样也是S2和D2间距离;W表示S1和S2间的距离,D1和D2间距离同样为W。为了便于计算,在三维笛卡儿坐标系中,令S2位于坐标系原点,即(0,0,0)处,那么S1、D1、D2的坐标分别位于(0,W,0)、(L,W,0)、(L,0,0)处。同时假设无人机飞行在高度为H的水平面上,其轨迹表示为U(t)=[x(t),y(t),H]T。为满足物理层网络编码的同步性需求,可以令无人机轨迹时刻满足到S1、S2距离相等,那么在时钟同步时,两源节点发送信息到UAV 的传播时延相等,即可满足同步性要求。因为地面节点是中心对称的,那么通过简单几何证明可以得知,无人机轨迹应满足y(t)=W/2。将无人机在t时刻到S1和S2的距离表示为;那么无人机到D1和D2的距离也相等,表示为,即
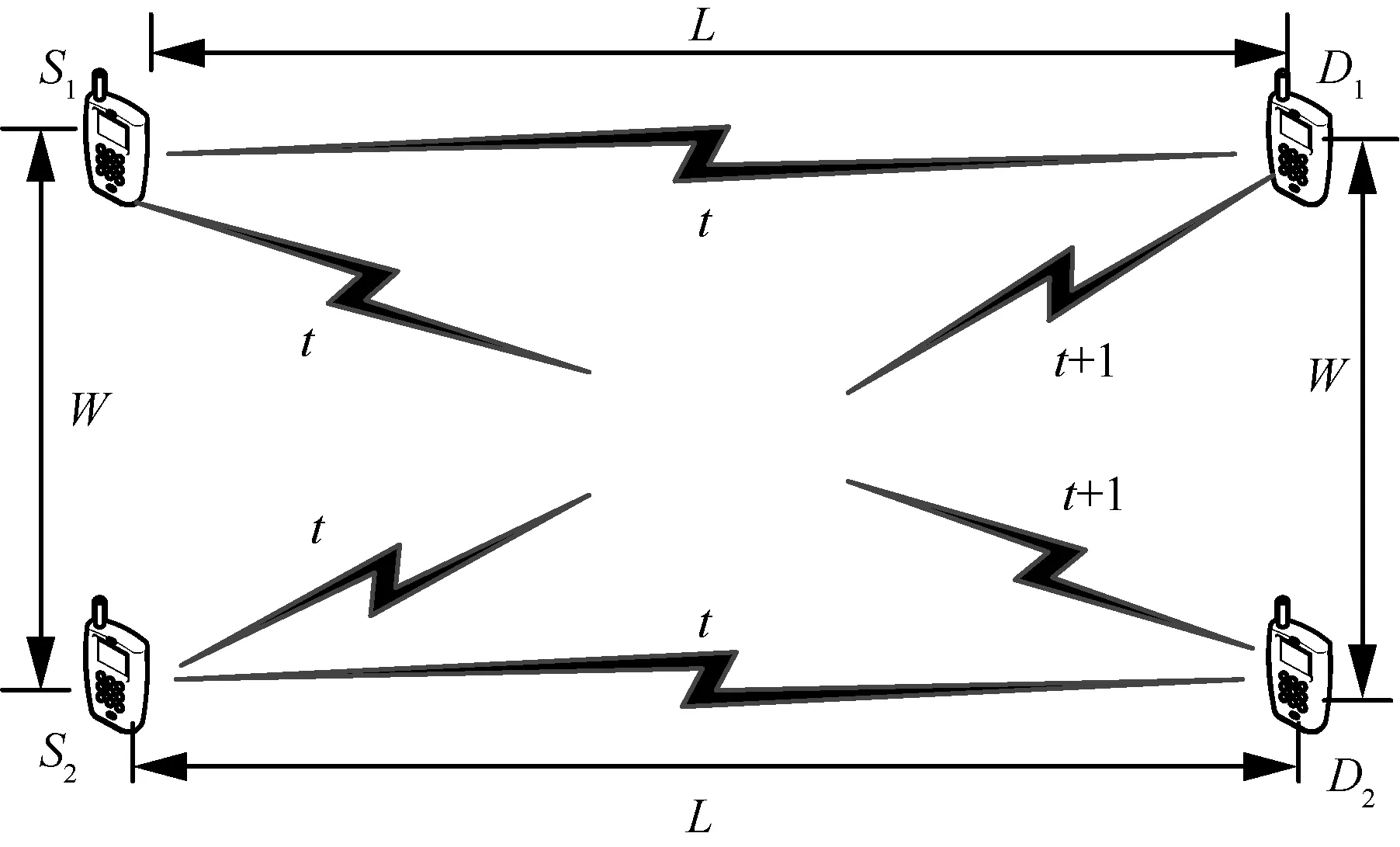
图1 基于PNC 的无人机中继通信系统模型
无人机在任意单位时刻内的飞行距离不能超过v,且v<<L。功率矩阵P代表源节点S1、S2和UAV 在t时刻的功率,且满足最大功率约束,即

其中,Pmax是三者功率之和的上限。
假设传输信道为瑞利衰落,信道增益为路径衰落和小规模信道衰落,由于采用物理层网络编码,那么在t时刻无人机接收来自S1和S2的叠加信号为

其中,α是路径衰落系数,分别为路径S1、S2到UAV 的小尺度衰落系数,满足独立分布且,和分别表示S1和S2发送信号的单位能量,代表路径噪声,服从均值为0、方差为N0的独立高斯分布。
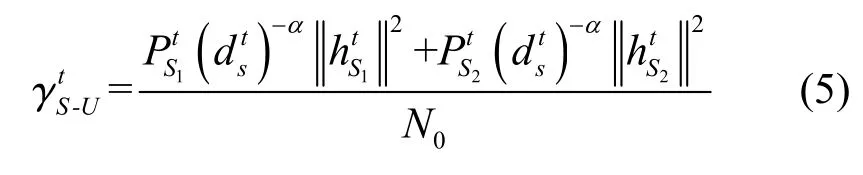
根据式(4),可以得到信源到无人机链路的信噪比为
类似地,D1处接收来自S1和UAV 的信号分别为
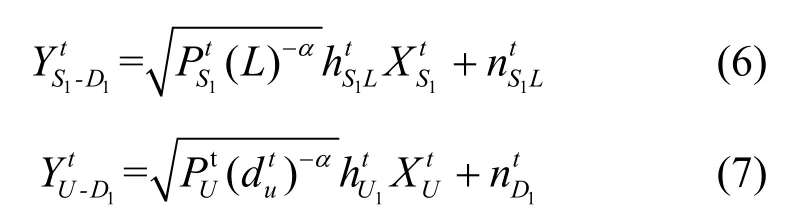
根据式(6)和式(7),可以得到S1和UAV 到D1处链路的信噪比分别为
与D1处接收的通信过程类似,D2处的接收信号为

根据式(10)和式(11),可以得到链路S2和UAV到D2处的链路信噪比为
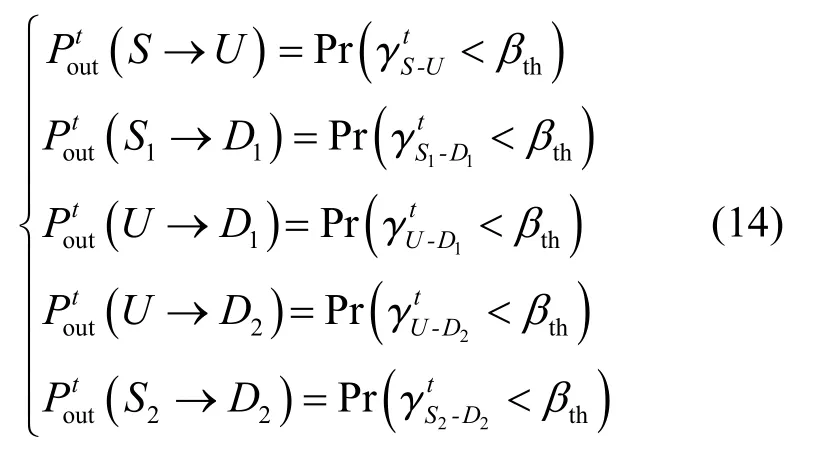
定理1根据式(14)中第3 项,即UAV 到节点D1通信链路的中断概率为
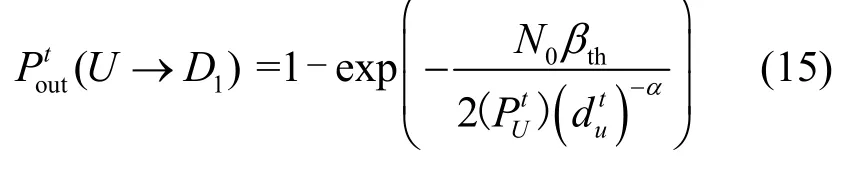
证明详见附录1。
在任一时刻,为保证通信质量,将通信成功的必要条件视为任意一条通信链路的信噪比不低于预设门限。那么总的中断概率可以表示为

根据定理1,可以用同样方式求得每条链路的中断概率,那么总中断概率为
优化目标为最小化总时隙下的中断概率,功率矩阵P和无人机轨迹U(t)为优化变量,因此,优化问题可以表述为
其中,C1和C2是S1、S2和UAV 的功率约束,C3是无人机的速度约束。显然,式(18)由于多时隙组合,是一个多变量耦合的非凸优化问题,不容易直接求得功率分配和轨迹优化的解析解。
3 资源优化算法设计
为解决式(18)的非凸优化问题,考虑在每个时隙交替完成资源优化的思想。即在给定功率的条件下,完成该时刻轨迹设计;在给定轨迹的情况下,完成该时刻的功率分配。
定理2为简化优化目标函数,最小化式(17)总时隙下的总中断概率,可以等效为式(19)
证明详见附录2。
3.1 轨迹设计
在给定S1、S2和UAV 功率的情况下,式(18)的问题可以转化为
此时式(19)所描述的问题仍为非凸问题。将式(19)的问题拆分为N个时隙内的优化问题,根据定理2,可以得到在任意t时刻的优化子问题为
此时,可以看出式(20)是一个凸优化问题,且其满足Slater 条件。因此,求式(20)最优解相当于求解其对偶问题的最优解[17],λ为对应于速度约束C5的拉格朗日乘子,那么式(20)的拉格朗日函数为


从而将求解式(19)转化为求解其对偶问题,即
采用次梯度的方法解决对偶问题式(24),次梯度方法是在选择的次梯度方向上搜寻可行的解。λw表示第w次的迭代,那么对偶函数f(λ)在λw的次梯度为

其中,[x]+表示max(x,0)。此时λ可以视为移动距离限制的损失代价,当UAV 速度超过限制时,λ会变大。当满足时,迭代停止,其中,δ2是差错门限。
基于Karush-Kuhn-Tucker 条件,通过对xt、yt和的微分,可以得到拉格朗日对偶问题式(22)的最优解,即
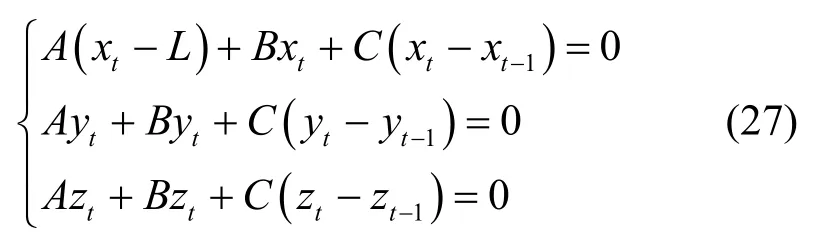
其中,A、B、C分别为

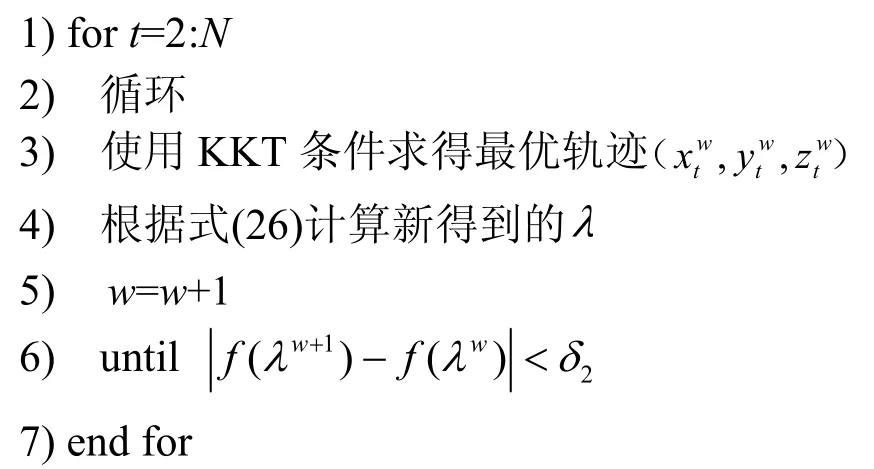
将解得的最优轨迹代入式(26)更新λw+1,轨迹优化算法流程如算法1 所示。次梯度算法将保证在有限的迭代次数内收敛[18]。
算法1轨迹优化算法
初始化定义t=N,给定初始功率矩阵P,w=0,λ0=0,初始化迭代差错δ2
3.2 功率分配
在给定无人机轨迹的情况下,为解决源节点和无人机间的功率分配问题,问题式(18)可表述为

通过对通信场景模型的分析可知,地面4 个节点S1、S2、D1、D2是中心对称分布,呈标准几何形状,且无人机需满足到S1、S2距离相等,那么易知无人机到D1、D2距离也相等,通过简单证明可以得到S1和S2的传输功率应相等时会有最小中断概率,即。令S1和S2的传输功率为PS,那么式(29)中的约束C7可以表述为

将式(30)代入式(17)可以得到

那么,最优功率分配问题变为

定理3式(32)在每个时隙内功率分配最优解为
证明详见附录3。
3.3 交替联合优化算法
轨迹设计和功率分配子问题都已解决,基于此本文提出了交替联合优化算法解决问题式(18)。在所提算法的每次迭代中,在给定优化轨迹U(t) 的基础上求出此时的最优功率分配P*。再以此求得的优化功率分配矩阵P*,用算法1 解决轨迹优化子问题,获得最优轨迹U(t)。令表示第k次迭代的总中断概率,当满足时,本文所设计的轨迹功率交替联合优化算法迭代终止,其中,δ1是预设的差错容忍门限。具体算法流程如算法2 所示。
算法2轨迹功率交替联合优化算法
初始化k=0,,在给定的当前功率条件下求解无人机轨迹优化问题式(20)
1) for
2)k=k+1
3) 在给定无人机轨迹的条件下,解决功率分配优化问题式(29)
4) 在给定功率的条件下,解决轨迹优化问题式(20)
6) end for
定理4交替联合优化算法总是保证收敛的。
证明详见附录4。
4 对比算法与仿真分析
4.1 2 种对比算法
为了验证所提算法的有效性,本节将所提交替联合优化算法与另外2 种基础预设算法进行比较。第一种是无人机固定位置的平均功率算法,即无人机在固定高度的同一位置悬停,功率Pmax/3;第二种是无人机固定位置的功率优化算法,即无人机虽然同样在固定高度的固定位置悬停,但源节点和无人机间的功率分配将采用第3 节提到的功率分配优化方法。在2 种对比算法中,无人机的位置被随机分配,但仍满足物理层网络编码的同步性需求,即无人机到源节点S1、S2的距离相等。
4.2 仿真分析
首先设置通信系统默认参数,总时隙数N=600,S1和D1间的距离L=400 m,S1和S2间的距离W=200 m。无人机的飞行高度设置为40 m,无人机在每个时隙内的最大飞行距离不能超过v=0.5 m。路径损耗系数α=4,中断概率的信噪比门限th=0 dBβ,算法1和算法2 中的迭代差错门限δ1=10-3,δ2=10-3,次梯度算法中的步长为a=1,b=2,αw=a/(b+w)。总的传输功率上限Pmax=28 dBm,噪声方差N0=-96 dBm。
图2 描述了3 种算法经过时隙数N=600后,总中断概率的对比。3 种算法下无人机的初始位置为均为U(100,100,40),从仿真中可知,平均功率分配算法的中断概率为Pout=0.052 74,功率分配优化算法的中断概率为Pout=0.05161。从图2 中可以明显看出,所提交替联合优化算法对于通信系统中断概率优化性能明显优于另外2 种算法,交替联合优化算法最终优化得到的中断概率为Pout=0.035 92,相较平均功率分配算法性能提升31.9%,相较功率分配优化算法性能提升30.4%。经过交替联合优化算法,378 个时隙后通信系统的中断概率达到最低,此时无人机的位置为U(287.86,100,40),源节点S1和S2的功率为=228.4 mW=23.58 dBm,无人机的功率为PU=174.1 mW=22.40 dBm。图3 描述了交替联合优化算法中随着时隙数变化,无人机功率和2 个源节点功率变化曲线。理论分析可知,功率变化的主要原因是随着时隙数增加,无人机在每个时隙都会进行位移,从而导致最佳功率分配随之变化,直到下一步移动后的功率分配优化并不会导致总中断概率的下降,从时隙变化下功率的分配情况也可以看出算法是收敛的。
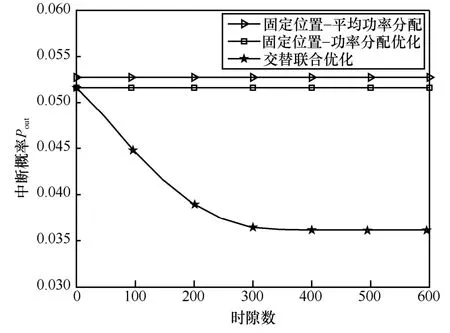
图2 时隙增长下3 种算法迭代后中断概率变化情况
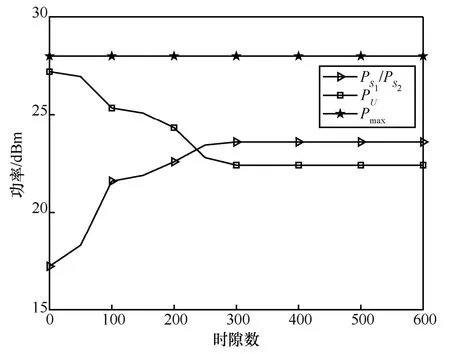
图3 时隙增长交替联合优化算法的节点功率变化情况
图4 描述了在时隙数N=600,Pmax=28 dBm 时,3种算法所得到的中断概率与距离L间的变化关系,且路径衰落与地面节点S1和D1(S2和D2)之间的距离L呈负相关。此时对于固定位置算法,无人机的位置为U(150,100,40),交替联合优化算法中无人机初始位置与固定算法相同。从图4 可以看到,随着L的增加,3 种算法的中断概率都随L增大而增大。同时也可以看出随着L的增大,交替联合优化算法所展现的性能始终优于固定位置下的功率平均算法和功率优化算法,且距离L越大,交替联合优化算法与另外2 种算法差距越大,所体现的性能越好,在L=600 m 时,交替联合优化算法相较于平均功率算法和功率分配优化算法性能分别提升了36.7%和32.2%。
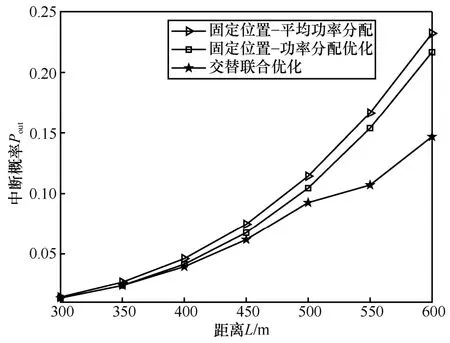
图4 距离L 变化下3 种算法的中断概率变化情况
图5 描述了在时隙数N=600,固定位置算法中无人机位置U(180,100,40),且交替联合优化算法初始位置与固定算法相同时,通过改变源节点和无人机的Pmax,仿真分析3 种优化策略的总中断概率的变化。可以看到随着Pmax的上升,3 种算法的中断概率都在逐渐变小,随着Pmax越来越大,3 种算法之间的中断概率越来越接近。可以得出重要结论,在功率有限的情况下,所提出的交替联合优化算法可以有效地降低应用物理层网络编码技术的无人机中继通信系统的中断概率。在Pmax=20 dBm 时,交替联合优化算法相较于平均功率算法和功率分配优化算法性能分别提升了20.1%和17.8%。
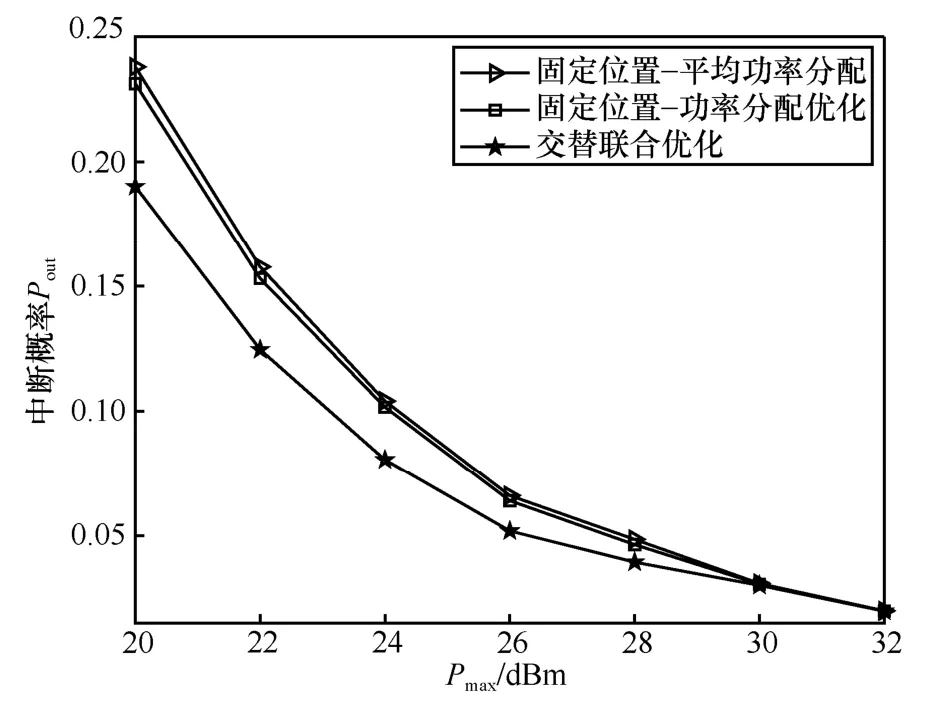
图5Pmax约束变化下3 种算法的中断概率变化情况(一)
图6 描述了无人机位置为U(300,100,40)时3 种算法随着Pmax上升,中断概率的变化情况。通过对比图5 和图6,可以看出固定位置-功率分配优化算法进行功率优化时,其优化效果明显受到无人机位置的影响,当无人机悬停位置适当时,可以比固定位置下的平均功率分配方法更逼近交替联合优化算法所优化的性能;当无人机悬停位置不理想时,功率分配优化算法和平均功率分配算法性能都很差。在Pmax=20 dBm 时,交替联合优化算法相较于平均功率算法和功率分配优化算法性能分别提升了20.1%和5.5%。随着Pmax变大,3 种算法的总中断概率都呈下降趋势,当Pmax足够大时,3 种算法的优化结果的中断概率较为接近。总体来说,当Pmax较小时,交替联合优化算法相较另外2 种固定位置下功率分配算法拥有更好的系统性能,能明显降低通信系统中断概率。

图6Pmax变化下3 种算法的中断概率变化情况(二)
表1 描述了在L=400 m,W=200 m 时,Pmax从20 dBm 变化到32 dBm,交替联合优化算法下无人机最终优化的位置和功率变化情况及信源的功率的数值变化情况。从表1 中可以看出,随着Pmax越来越大,无人机的位置也越来越靠近目的节点,在Pmax较低时,无人机较为靠近源节点,当Pmax足够大时,源节点和UAV 的功率分配接近平均分配。同时也可以从图6 得到侧面印证,当Pmax较大时,3 种算法的总中断概率较为接近,此时无人机轨迹优化对系统中断概率的影响较小。

表1 交替联合优化算法优化结果
5 结束语
本文对基于物理层网络编码的无人机中继通信网络中的功率分配和轨迹优化策略进行研究,对未来常态化的非对称拓扑结构下应用PNC 的无人机中继通信模型资源优化求解,以及应用无人机轨迹设计满足PNC 同步需求或满足特定异步约束提供了思路。本文考虑了联合优化无人机轨迹和系统总发射功率分配,在满足物理层网络编码同步性及系统发射功率上限约束和无人机速度约束下,建立了优化资源分配的最小化系统中断概率模型。通过将原非凸问题解耦为2 个子问题并将总时隙分解为单个时隙,用KKT 条件及次梯度下降法求解2 个凸优化子问题,提出的交替联合优化算法可以获得全局最优解。仿真结果表明,交替联合优化算法的性能优于其他2 种固定位置算法。
附录1 定理1 证明
根据式(9)和式(14),源节点S1和S2到UAV 处叠加链路的中断概率为
式(14)中的其余几项可以通过同样的推导方法得到类似的形式。证毕。
附录2 定理2 证明
式(15)可以被看作式(36)和式(37)的组合
附录3 定理3 证明
基于定理2,当给定无人机轨迹后,解决功率分配问题式(32)中优化目标可以等效为
附录4 定理4 证明

接下来,在此基础上解决功率分配问题式(32),获得的最优功率分配记为Pk,此时给定的最优轨迹为Uk,那么可以得到

联合式(40)和式(41),可以得到

即Sk≤Sk-1,可以判断交替联合优化算法在每次迭代后对于问题式(18)来说中断概率都是非增的,而总中断概率始终为非负值,故有下界,因此可以判断交替联合优化算法是收敛的。证毕。
