多模态翻身护理床控制系统设计与实现
2021-09-28于大骞程武山吴云龙
于大骞,潘 颖,程武山,2,吴云龙
(1.上海工程技术大学机械与汽车工程学院,上海 201620;2.安徽非禾科技有限公司,安徽 芜湖 241003)
0 引言
当前,我国人口老年化趋势愈加严重,失能老人所占比例越来越多,现有的养老和护理资源不足以满足现实需求,同时受中国传统文化影响,许多家庭倾向于居家养老,而居家养老关键在于护理,但是子女常常忙于工作,很难抽出大量时间护理老人,因而老人常出现压疮、身体卫生不干净甚至是慢性病情加重的情况[1-2]。值得注意的是,在整个护理过程中,最费时费力的便是翻身护理,单个人进行护理时,需要用一只手抬起老人身体一侧,另一只手对其进行按摩和擦洗,该过程对老人和家人都是一个痛苦的过程,同时也很难保证护理质量。
目前,国内外相继开发出具有多种功能的电动护理床,以便于护理人员对失能患者进行全身护理,常见的功能模块有支背、上下曲腿、半自动坐便和床体升降[3]。国外的多功能护理床发展最早,应用最广泛,相关的核心技术也都掌握在他们手里,其中比较出名的公司有日本的八乐梦和芙兰舒、英国的世道,但具备翻身功能的比较少见,即使有也是功能比较单一,无法很好协助护理人员进行擦洗和按摩。相比于国外市场,国内市场多功能护理床价格实惠,但是技术不够成熟,市场占有率也不高,许多医院的高端护理床主要还是依靠进口,代表性公司有小棉袄、机械保姆、普康,这些床的翻身功能也只是一个整体翻身,无法对患者的背部、腰部进行按摩擦洗[4]。
针对此问题,本文设计的多模态翻身护理系统与其它护理床相比创新之处在于仅仅使用两台电动推杆实现具有6 种模态的无线翻身控制功能。左(右)翻身(背部支撑板、腰部支撑板)上行之后,可以运行左(右)背部护理,背部支撑板回到初始位置,腰部支撑,可以对背部进行按摩擦洗,同样也可以进行左腰部护理,腰部支撑板回到初始位置,背部支撑,可以对腰部进行按摩擦洗。同时可以在任意角度暂停,便于护理人员进行护理。
1 系统整体设计
多模态翻身护理系统由床体和无线遥控器两大部分构成,其中床体部分包括基于STM32 的微控制器、动力驱动单元、最小系统和翻身机械结构,系统组成框图如图1 所示。①床体微控制器包括核心板和底层板两部分,核心板使用STM32F429,并具有正常工作的最小系统,底层板集成系统所需功能,如语音模块、通信模快等;②动力驱动单元包括直线驱动器和光电开关,直线驱动器为背部与臀部板运动提供动力,光电开关主要用来为两电动推杆标记初始位置,修正机械加工误差和初始位置不同导致的剪刀切现象[5];③手持遥控器,采用STM32F103 作为微控制器,主要包括最小系统、按键和触摸屏,并通过ESP8266 与床体控制器建立无线通信;④翻身机械机构,可以实现左翻身上行、左背部护理、左腰部护理、右翻身上行、右背部护理、右腰部护6 种模态的翻身。
2 机械结构设计
2.1 翻身机构设计
相比于整体翻身机械结构,系统翻身功能需满足分段翻身,即背部和腰部板既可以同时运动,又可以独立运行,要在紧凑的床体下完成这样6 种模态功能,而又保证机构不干涉,是该系统技术难点之一。同时,考虑到翻身时的安全问题,整个床板纵向有两块板,满足背部护理与腰部护理需求,横向有3 块板,左右各1 块侧翻板,起到保护作用,而中间块作为支撑块。从运动方向看,左右两边的同一功能互为反向运动,应该用两个动力源完成,这样便需要4 个动力源,考虑到成本和受限的物理空间,项目组采用了2 个动力源设计方案,而从4 个动力源减少到2 个动力源的过程,无疑给系统设计增加了技术难度。由于左翻和右翻机械结构对称,本文以左翻身机构为例进行分析。

Fig.1 System composition图1 系统组成

Fig.2 Schematic diagram of left turning mechanism图2 左翻身机构简图
如图2 左翻身机构简图所示,部件AFEB 和GHJK 均为平行四边形机构,0D 为推杆驱动部件,KJ 为水平支撑杆件,用来保证侧板在运动过程中保持水平,提高安全性,滚轮I向上运动时,为右侧背部翻身,滚轮C 向上运动,为左侧背部翻身。静态时电动推杆处于中间位置,此时整个床板处于水平位置,推杆伸长运动时,BEF 杆顺时针运动,带动ABC 杆上滚轮C 向上运动同理,推杆收回时,EFI 杆上滚轮I向上运动,完成右翻功能。根据翻身机构简图可以得出算出机构自由度为:

其中,n为活动构件数,图中共有9 个;PL 为低副数,图中有11 个转动副,1 个移动副;PH 为高副数,图中有1 个,且具有1 个虚约束。
2.2 运动学分析
机械机构的运动学分析包括位移、速度和加速度分析[6],在该机构运动分析中只需求出位移分析方程,通过依次求导,便可进行速度和加速度分析。本文主要对角位移进行分析。
通过图2 可知,四边形ODEF 和LIFG 构成回路,由解析法可求出它们的位置运动矢量方程。ODEF 四边形的矢量方程为:

其中,OD、DE、EF、OF 代表各种杆长,其中OD 为变量,t 时刻长度为M+Vt,V 为推杆速度,设置为1cm/s,M 代表OD初始长度,其长度为40cm 。α 与γ 为知变量分别代表对应杆长与水平线夹角。通过欧拉公式将式(2)变为如下方程组:

同理可得LIFG 四边形欧拉变换后的矢量方程:

并且:

联合式(3)、式(4)和式(5)可以求出左翻角度δ 随时间单位变化曲线,如图3 所示(彩图扫OSID 码可见)。
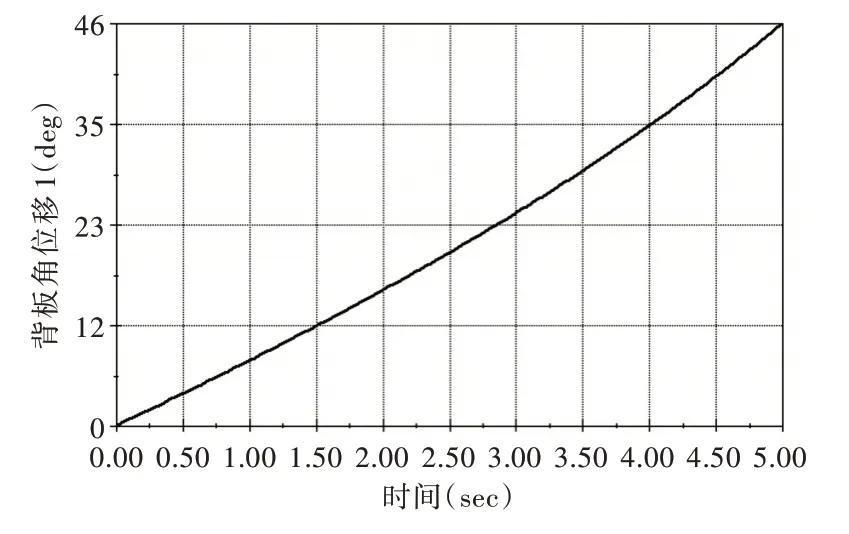
Fig.3 Left angle displacement curve图3 左翻角位移曲线
2.3 动力学分析
假设人体上身最大重150kg,翻身时背部和腰部板各承受一半人体体重,此时背部板承受750N 的压力。利用SolidWorks motion 插件,完成对左翻部件中电动推杆D 点的动力学分析。分析前,先导入装配好的模型,然后设置推杆的运动速度为1cm/s,方向沿OD 向上,接着对背部板施加力,最后可以得出推杆D 点的受力曲线图,如图4 所示(彩图扫OSID 码可见)。
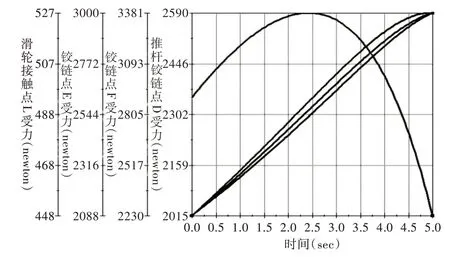
Fig.4 Force curve of left turning mechanism at D point图4 左翻机构D 点受力曲线
图4 中,红色曲线反映了推杆D 点的受力随时间变化的趋势,可以看出在机构处于极限角度时,推杆受力2 590N小于推杆极限负载3 000N,并且整个过程光滑没有突变,满足设计要求。
3 系统硬件设计
3.1 STM32F4 微控制器最小系统
系统选用意法半导体公司的STM32F4 系列微控制器作为主控芯片,其低功耗、高性能,以及丰富的I/O 口和外设资源能够很好地满足系统功能需求,也便于功能扩展[7]。为保证芯片正常工作,设计了包括供电、复位、时钟、BOOT启动和下载电路在内的最小系统[8]。芯片最小系统电路如图5 所示。
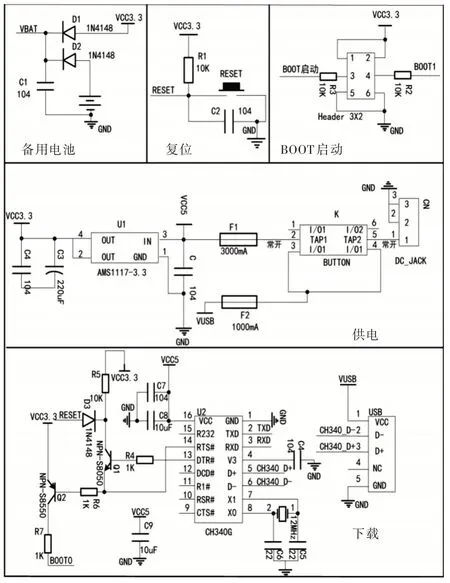
Fig.5 Minimum system circuit图5 最小系统电路
3.2 电源电路
系统通过三线插头将220V 家用电接入控制箱中,经过明伟开关电源,输出5V20A 和24V2A 两路电,5V 电通过AMS1117-3.3 降压芯片产生3.3V 电压用来给控制板芯片供电[9],同时5V 电也为电动推杆反馈端供电。24V 电接入继电器,通过I/0 控制继电器的常开触点闭合,给电动推杆供电。图6 为控制板电源电路,其中F1 为S1206 型熔断器,防止电流过大烧毁电路。
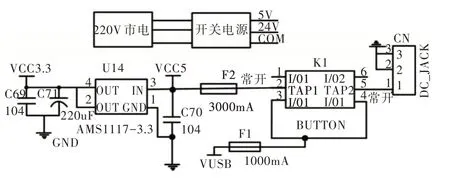
Fig.6 Power supply circuit图6 电源电路电路
3.3 串口电路
串口电路设计如图7 所示,在电路设计时加入SP3232芯片,该芯片可以实现电脑COM 口与STM32 的RS232 串口输出电平之间的转换,继而实现PC 机与下位机的数据传输[10]。本文采用了两个串口进行异步通信,主要实现PC机与下位机STM32 的通讯,并配合遥控器利用WiFi 向下位机发送指令,从而实现远程遥控功能。

Fig.7 Serial circuit图7 串口电路
3.4 WiFi 无线数据传输模块
为实现系统的无线控制要求,本文选择乐鑫公司的ESP8266 无线模块,该模块工作电压为3~3.6V,支持常见传输协议UART、I2C,待机时消耗功率小于1.0 mW,内部集成MCU 便于与单片机建立串口通信,同时内置有TCP/IP 协议栈,用户只需发送AT 指令,便可建立无线通信[11-12]。图8 为ESP8266 模块接口电路图,系统通过串口USART3 与之建立通信,其引出的引脚共有6 个,其中5、6 两个引脚为供电端,3、4 两个引脚为通讯引脚,第二引脚为复位引脚,第一引脚为普通IO 口引脚。
3.5 遥控器电路
遥控器电路主要由最小系统、液晶触摸屏和按键3 部分构成。遥控器采用STM32F103C6 作为主控MCU,用AMS1117 降压芯片为MCU 提供3.3V 工作电压,按键共有4个KEY_UP 代表 上行、KEY_DOWN 代表下 行、KEY_STOP代表上行和KEY_REST 代表开机,触摸屏选用迪文科技4.3 寸串口屏,通信方式为RS-232,其中引脚5 与6 分别与PA2 和PA3 连接,完成串口屏的通信。用户按下开机按键进入功能选择界面,触摸相应功能,按向上或向下按键,MCU 便可读取用户触发的指令,同时控制WiFi 向下位机发送控制指令,完成对床体的无线控制。图9 为遥控器按键电路图。
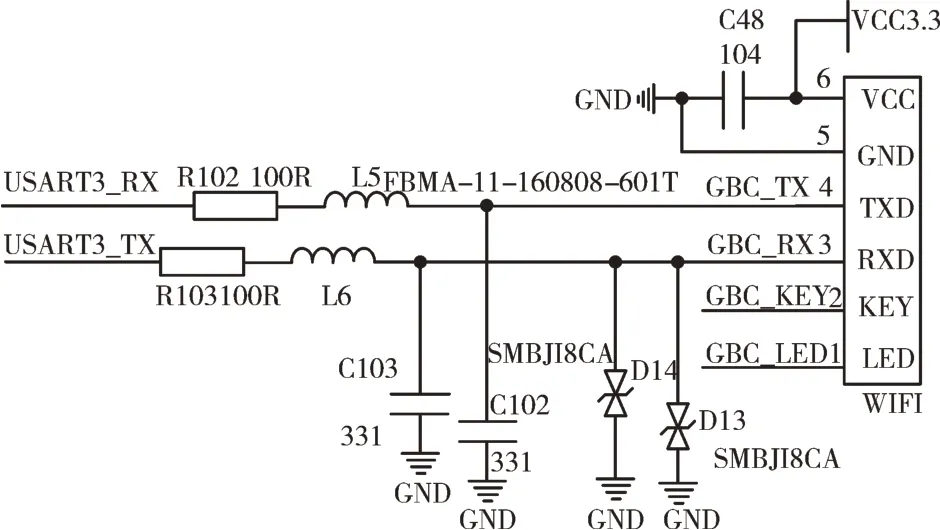
Fig.8 ESP8266 module interface circuit图8 ESP8266 模块接口电路
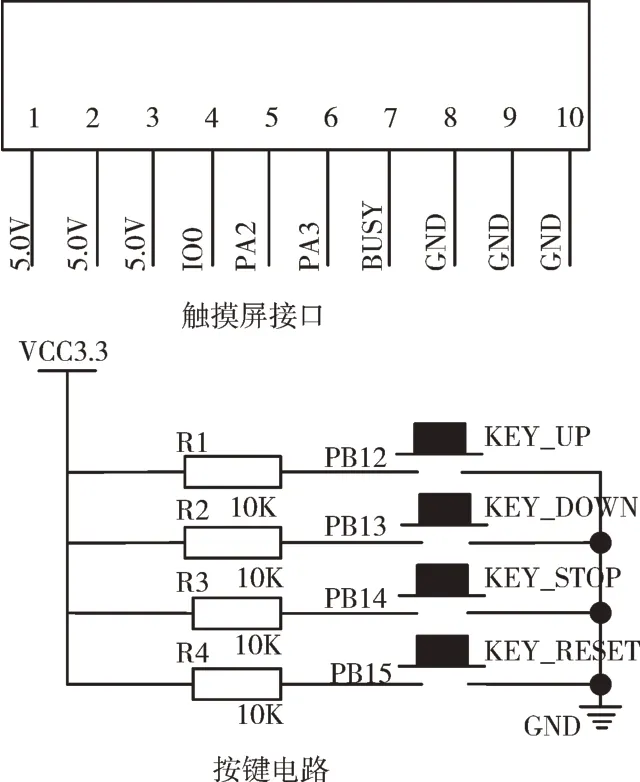
Fig.9 Button and touch screen circuit图9 按键和触摸屏电路
3.6 PCB
图10 为遥控器和床体控制器的PCB 板图,其设计在完成原理图设计后进行。为了保证PCB 性能稳定,在进行电路布局与布线过程中需遵循以下规则:
(1)线宽规则。对于电源线或者电流较大的信号线,需选取粗一点的线宽,一般设置为20mil[13]。对于其他信号线可设置为10mil。
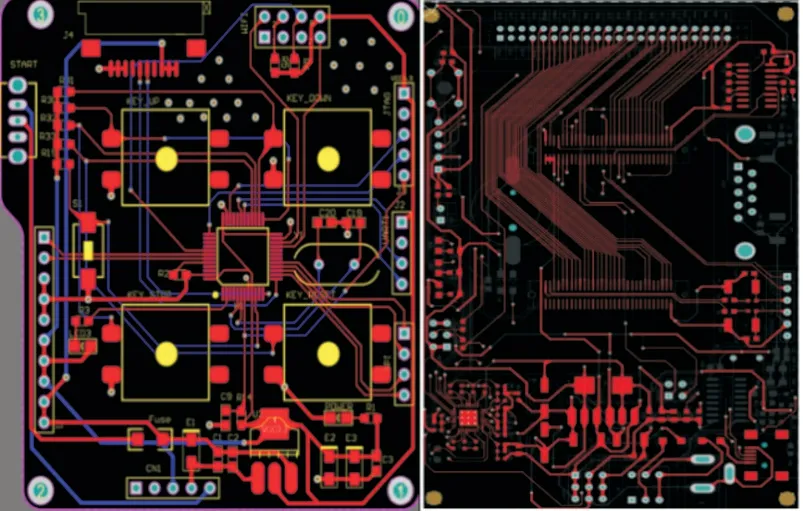
Fig.10 PCB board design图10 PCB 板设计
(2)防电磁干扰规则。走线时,多用斜角,不用直角,多层走线要避免走平行线,可以垂直或者斜交走线。对于强辐射性元器件比如继电器、稳压电源等应远离控制板。
(3)间距规则。线与线之间的间距(过孔-过孔、焊盘-焊盘等)应该设置成8mil。
(4)走线短原则。为了减少干扰,走线越短越好,可以采用模块化思想,缩短有电气连接器件的距离。
4 控制系统软件设计
4.1 总体设计流程
下位机控制程序使用keil5,在MDK 开发环境下采用C语言进行编写。整个程序包括主程序、无线设置程序、安全程序和功能程序等部分。其软件整体运行流程如图11所示。控制箱上电以后,首先对系统运行所需资源进行初始化,包括HAL 库、系统时钟、延时函数、串口、光电开关、无线和语音等。然后进行安全检测,复位不正常状态,接着手持遥控器自动连接到控制板开设的热点,热点名称为Medical_Bed,密码12345678,端口号8086,连接成功后系统播报有新的设备接入,然后等待控制端发送指令,执行过程中不断记录系统运行状态并上传给上位机同步显示动画[14]。
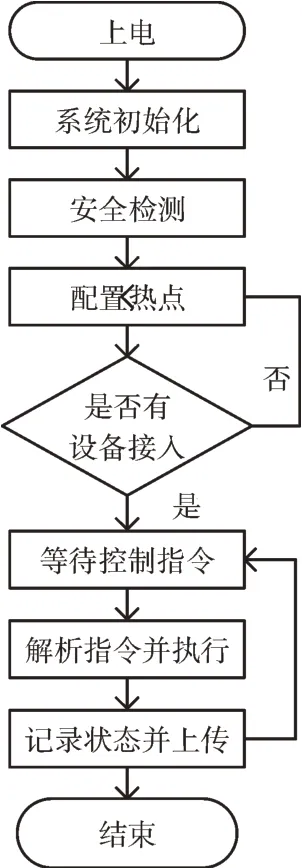
Fig.11 Overall operation flow图11 整体运行流程
4.2 右翻身与右背部护理程序
由于多模态翻身的6 种功能,动力源只使用了两台JC35W2 型捷昌电机,因此每种功能的实现由两台电机紧密配合完成,而每种功能涉及上行和下行,并能在已设置的翻身角度范围内任意角度暂停,因此程序中为每一个功能定义了运行角度极限装载值SP、运行状态Flag、运行方向Dir_flag 和运行位置Runed 4 种类型的变量[14]。考虑到左右两侧翻身和护理的控制逻辑相同,这里只选取右翻身和右背部护理两种功能进行分析。
当接收到右翻指令,系统跳转到右翻Fun_YF(void)功能函数,为确保安全首先进行联锁检测[15],只有在支背、上下曲腿、座便、桌子复位后,才能执行右翻身功能。右翻身有3 种状态,水平位置时只能右翻上,终止位置只能右翻下,中间位置既可以上也可以下,因而根据右翻标志位YF_Flag、角度极限装载值SP 和当前已运行值YF_Runed 3个变量标记右翻状态。右翻上行时,YF_Flag 置1,调用Mo⁃tor_Y(u8 dir,u32 pulse)函数,第一个参数为推杆方向位,pulse 为YF_SP 与YF_Runed 的差值,代表运行时间。随后开启定时器TIM10_Init(pulse,65000),背部和腰部的两台电动推杆的方向位对应的IO 口输出高电平,触发继电器常开触点闭合,输出24V,推杆运行[16]。在While 循环程序中等待定时时间到,同时扫描是否有暂停键按下。翻身程序设计流程如图12 所示。

Fig.12 Flow of right turn program design图12 右翻身程序设计流程
右背部护理程序设计流程如图13 所示,其具有护理和复位两种状态,执行护理前需要满足YF_Flag=1 和YYH_Flag=0,即系统处于右翻身状态且右腰部护理已复位,满足要求后调用Motor_YHL(u8 dir,u32 pulse)函数,背部电动推杆反向运行位IO 口输出高电平,推杆反向运行,背部水平光电开关被触发,推杆停止,背部悬空,此时护理人员可以进行背部擦洗和按摩。护理复位时,根据翻身当前已运行值YF_Runed 进行复位,否则会导致背部板和腰部板不平。
4.3 ESP8266 模式配置
ESP8266 有3 种模式,分别为客户端模式(STA)、接入点模式(AP)和混合模式(STA+AP)[17],STA 和AP 模式配置流程如图14 所示,其中左侧为STA 模式配置流程,右侧为AP 模式配置流程。
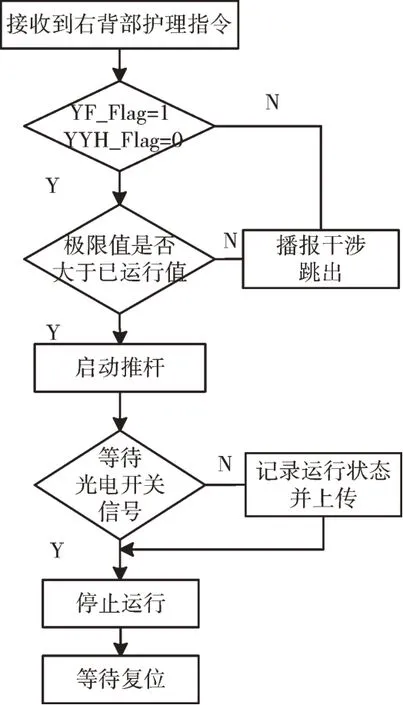
Fig.13 Design process of right back nursing program图13 右背部护理程序设计流程

Fig.14 STA(left)and AP(right)mode configuration flow图14 STA(左)和AP(右)模式配置流程
该系统下位机将ESP8266 设置为接入点模式,建立无线局域网,接受上位机和遥控器的控制指令,遥控器设置为客户端模式,用来连接热点。模式设置通过串口通信的方式给ESP8266 发送AT 指令。其中,模式设置指令为AT+CWMODE=mode,mode=1 时为STA 模式,mode=2 时为AP 模式;重启指令为AT+RST;多连接开起指令为AT+CIPMUX=1[18];其它配置指令如下。

4.4 串口程序
系统通过串口接收用户控制指令,首先要对串口进行初始化,设置其波特率、数据字长、停止位、校验位、工作模式等,同时通过虚函数HAL_UART_MspInit(UART_Handle⁃TypeDef *huart)进行时钟使能、引脚和中断配置[19-20],当接收到命令时,将产生串口中断,中断处理程序将接收寄存器的内容拷贝到串口接收缓存区,其流程如图15 所示。

Fig.15 Flow of serial port design图15 串口设计流程
5 实验与分析
5.1 有限元分析
人体随床体翻转的过程中,有整体侧翻、腰部悬空和背部悬空3 种状态,床体的连接杆和支撑梁在运动过程中承受的负载最大,因此需要重点对这两个部件进行有限元分析。
两个部件材料设计为3ms 的碳钢,最大负载为3 000N,将模型和参数导入有限元分析软件[21]中,分别得到图16 支撑梁有限元分析和图17 连接杆有限元分析,其中(a)与(c)为应力分析,(b)和(d)是位移分析。

Fig.16 Finite element analysis of supporting beam图16 支撑梁有限元分析
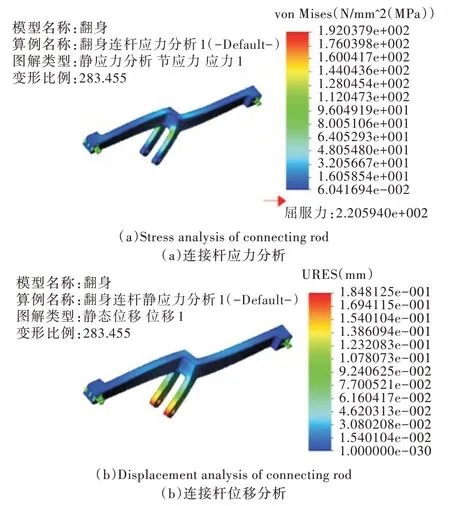
Fig.17 Finite element analysis of connecting rod图17 连接杆有限元分析
根据分析结果可以得出,两部件的最大应力都小于屈服力,位移量偏小,整体满足实际使用。
5.2 样机测试
翻身功能可以分为左右两部分,每部分对应3 种功能,护理部分需要翻身功能开启后才能运行。整个翻身角度最大为60°,并且可以任意调节,其设定需要将角度转换为定时器的装载值,从时间上控制电动推杆运行的位移,从而达到改变角度的目的,函数关系为Arr(转载值)=280*ZF_SP(角度)。在实际运行中,由于机械结构存在加工误差,导致背部和臀部板复位后位置不同,因此下一次运行的初始位置也不同。在同一角度设置下,两部分终止位置不同,导致整个侧翻不平整,会给老人带来不舒服感,因此需要在初始位置加装光电开关并调节位置[22]。综上需要进行3个方面的测试:①电动推杆位移与翻身角度关系测试;②复位测试;③功能测试。设计实验时将第1 个与第2 个测试相结合,每个实验进行100 次,其中推杆位移根据脉冲反馈进行计算,与理论位移取差的绝度值,并算出平均值,同时可观察复位情况。功能测试从30°开始,步进5°,在7 个角度状态下进行测试,算出成功率。测试结果如表1和表2所示。
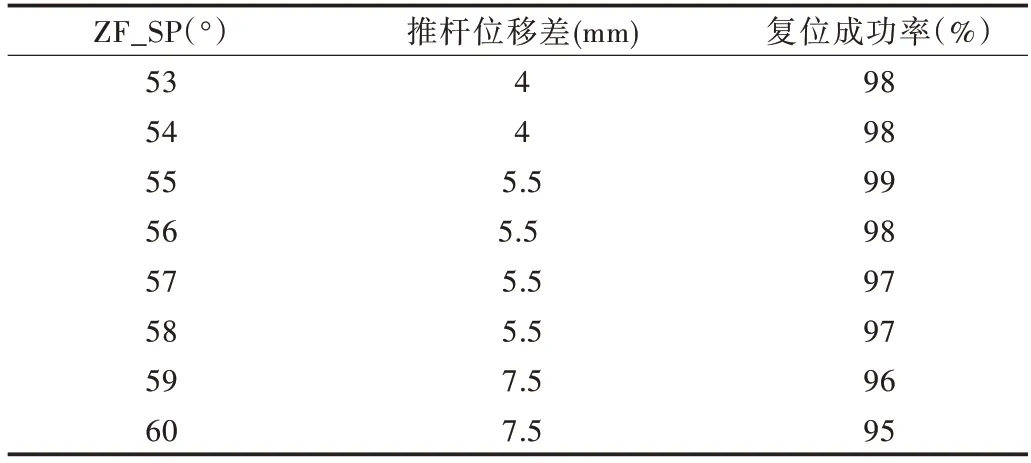
Table 1 Push rod displacement and reset success rate under different turning angles表1 不同翻身角度下推杆位移和复位成功率
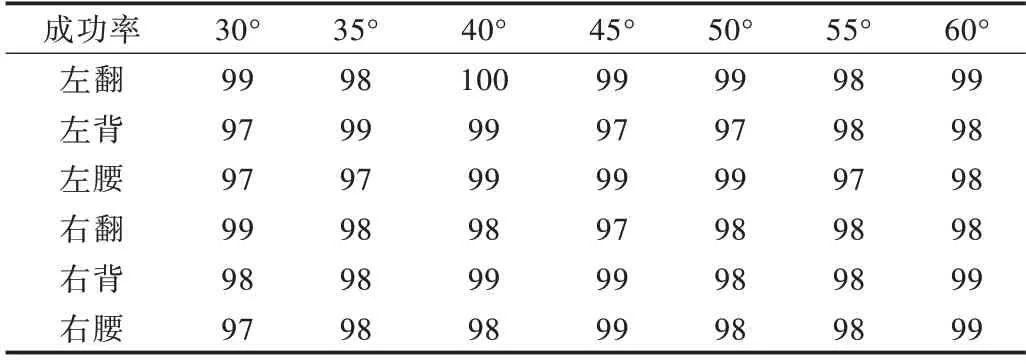
Table 2 The success rate of turning function underdifferent turning angles表2 不同翻身角度下翻身功能成功率 (%)
多模态翻身功能测试效果如图18 所示。其中(a)为右翻身,(b)为右腰部护理,(c)为右背部护理。
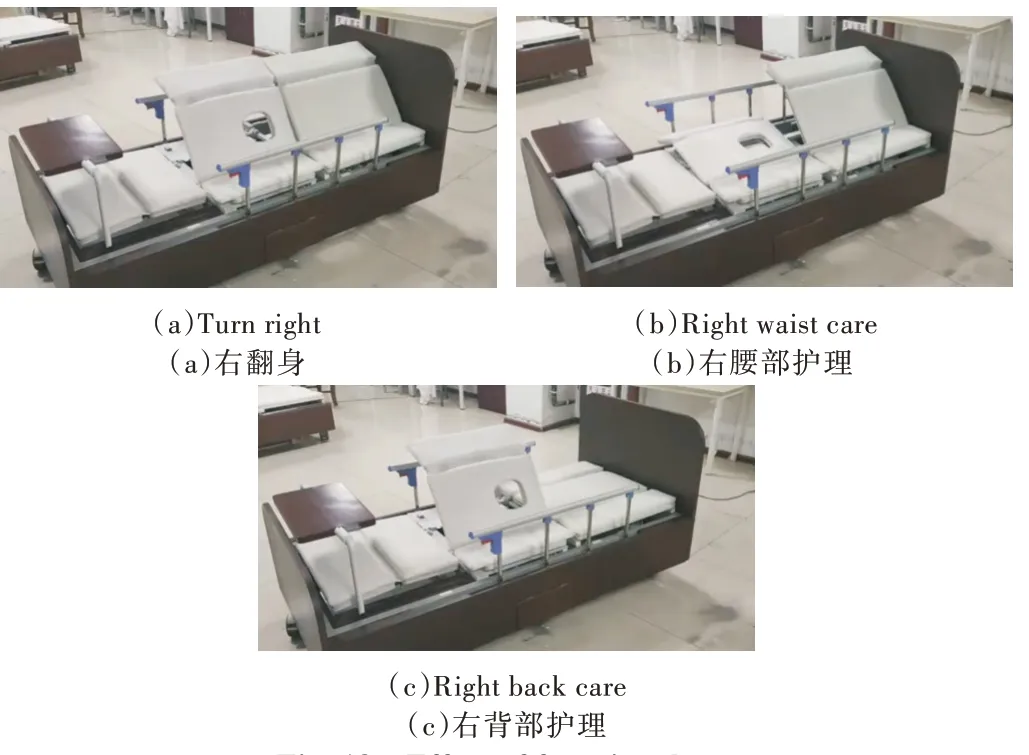
Fig.18 Effect of functional test图18 功能测试效果
从实验结果可以看出,翻身功能平均成功率98.2%,运行平稳,基本能成功运行,但是由于角度与推杆位移不完全呈线性关系,导致实际运行位置与理论位置产生偏差,在程序中根据脉冲反馈判断是否到达位置会出现误判,导致运行失败,同时还受到无线通信成功率的影响。另外,在翻身水平位置安装光电开关,很好地解决了翻身不平的问题,减轻了多次运行积累的角度误差,但是随着运行角度变大,复位成功率逐渐降低。总体来看,多模态翻身护理床系统运行稳定,可靠性高,满足生产应用要求。
6 结语
本文设计了一种多模态翻身护理床控制系统,利用平行四边形结构和2 台电动推杆,实现了6 种模态的翻身功能,并在结构紧凑的床体下有效地避免了干涉问题。与目前市场上的电动翻身护理床相比,该系统结构简单,运行平稳,可极大地减轻护理人员的工作强度,并提高了患者护理体验,为床上翻身护理提供了新的解决思路。
但该系统依然存在一些不足,虽然很好地解决了水平位置到终止位置时的翻身不平问题,但中间态依然存在角度偏差,如若按下暂停键,会出现翻身不平问题。此外,机械设计中采用了许多非标准零部件,机构呈现分块对称的平行四边形结构,这导致系统对加工和安装精度要求高,给调试工作带来了不便。最后,系统的安全性需作进一步优化。目前系统通过联锁和开机复位机制,能够满足正常情况下的安全运行,但在极端条件下,比如光电开关失效或者非正常断电,可能会出现剪刀切现象,因此需作进一步研究。
未来,多功能护理床的集成功能将越来愈多,如何在紧凑床体下集成更多功能,同时还能有效地避免干涉将成为研究的难点。同时,床体承载着失能或半失能患者的生活起居服务功能实现,系统的安全可靠性设计需要全方面考虑。
