基于遥感影像的地图道路网数据变化检测分析
2021-09-27吕喜容
吕喜容
(厦门亿力吉奥信息科技有限公司,福建 厦门 361009)
0.引言
道路遥感影像在民生、救灾、军事等方面具有重要作用,因此,研究地图道路网数据变化检测分析方法,分析同一地区不同时相的遥感影像,检测道路网数据变化,定位产生变化的道路,判断变化类型,及时更新道路地图,具有重要意义。
当前国内外道路变化检测研究都取得较大发展,通过图像配准、目标分割等计算机视觉技术,检测变化的道路区域,分类和识别道路变化类型。文献[1]预处理采集的道路遥感影像,将笔画宽度作为道路特征,采用均值漂移算法,初始化道路特征信息,在遥感影像的样本数据中,后处理道路数据,提取符合空间形态的道路数据,以及符合属性特征的信息数据,但该方法受外界地形和天气影响较大,道路区域检出率较低。文献[2]构建道路特征编码器,采用迁移权值算法,区分道路区域和非道路区域的空间几何特征,利用人工神经网络训练方法,拟合道路特征,得到道路辐射的主干网,但该方法自动化程度较低,道路区域拓扑结构不连贯,检测精度较低。针对以上问题,结合区域遥感影像,设计地图道路网数据变化检测分析方法,采用旋转滑动模板,聚类遥感图像中的道路区域,优化道路检出率和检测精度。
1.基于遥感影像的地图道路网数据变化检测分析方法设计
1.1 提取遥感影像的道路网数据
采用旋转滑动模板,结合聚类算法,提取遥感影像中的道路网数据。将可旋转的滑动模板,作为提取道路网数据的基本单元,根据遥感图像分辨率,设置模板大小。把遥感图像输入旋转滑动模板,滑动矩形模板,0~90°旋转模板,使模板覆盖所有道路区域。矩形模板的旋转角度,由计算模板顶点得到,如公式(1)所示:

式(1)中,(x,y)为模板当前顶点位置;a为旋转角度;(x1,y1)为模板旋转后的顶点位置;m、n分别为模板长度和宽度。将长度远大于宽度的条状结构,作为遥感影像中道路的几何特征,删除不符合几何特征的区域,在模板两侧设置长方形区域,取反检测背景,剔除非道路干扰区域。采用邻域均值法,对遥感图像进行任意角度的一致性检测,统计模板内相似的像素个数,将相似个数大于设定阈值的模板区域,作为一致性较高区域,即地图道路的候选区域。
筛选道路候选区域,通过特定颜色量化像素值,统计量化后的像素,得到颜色分布的颜色直方图,将其作为候选区域的颜色特征,将RGB色彩空间的三原色,转换为HSV中的亮度、饱和度、色调三个参数,增加颜色直方图的维度。然后提取道路候选区域的纹理特征,定义9×9大小的方形窗口,令方形窗口遍历整幅遥感图像,比较窗口内中心点和其余点的像素值大小,若小于中心点,将像素点位置视作0,否则视作1,从左至右依次读取位置点数,统计窗口内所有像素点的二进制数,将相同的二进制数归为一类,记录二进制数中的最小数值,即为候选区域的纹理特征[3]。
将提取的颜色特征和纹理特征,输入k-means聚类算法,不断修正所有道路区域和非道路区域的距离误差,得到去除广场、水体等大部分误检区域的道路候选区域,界定道路区域和非道路区域。针对二进制数的道路网络二值图像,检测二值图像中的非零部分,把道路端点细化为单像素,将单像素连通区域作为道路骨架。提取道路骨架,统计骨架内与非零像素点欧式距离为1的像素点,当非零像素周围仅有一个不为零的像素点时,判定该点为骨架末端像素点,否则判定该点处于非末端区域,标记并连接道路末端的像素点,得到遥感图像的道路网[4]。至此完成遥感影像道路网数据的提取。
1.2 匹配新道路网数据和历史道路网数据
将遥感影像提取的道路网数据,作为新道路网数据,使其与历史道路网数据相匹配。引入径向基函数网络理论,匹配道路网数据的几何信息,包括长度、形状、方向、结点度、距离,将其作为道路网数据的5个空间特征,判断新道路网和历史道路网的相似度。利用长度相似度S,判定道路几何长度的相似程度,如公式(2)所示:

式(2)中,L、L′分别为新道路网数据、历史道路网数据中的道路几何长度;min、max分别为求最小值函数、求最大值函数。利用方向相似度A,判定道路整体走向的相似程度,如公式(3)所示:

式(3)中,O、O′分别为新数据和历史数据中道路首尾结点连线的方向角。利用形状相似度,综合描述道路形状特性,包括综合型道路、曲线型道路、平直型道路,形状相似度特征因子f计算公式如公式(4)所示:

式(4)中,X、X′分别为新数据和历史数据中第i个节点和第i+1个节点组成向量。形状相似度G计算公式如公式(5)所示:

式(5)中,M、M′分别为新数据和历史数据中的道路节点数;ki+1、ki为道路第i+1节点与起始节点、i节点与起始节点之间累积长度与道路总长度的比值[5]。利用距离相似度F,描述道路之间的相对位置差异,计算公式如公式(6)所示:

式(6)中,U为新数据和历史数据中的道路Hausdorff距离;B为新数据中道路生成的搜索缓冲区半径。利用结点相似度D,判定新数据和历史数据中,道路两端结点的结点度相似程度,对道路首尾结点的相似度进行分权求和,结点相似度D计算公式如公式(7)所示:

式(7)中,J、J′分别为新数据和历史数据中的道路首结点结点度;P、P′分别为新数据和历史数据中的道路尾结点结点度。构建三层结构的人工神经网络,把5个空间特征相似度值,作为网络输入信号,非线性连接网络结构,迭代训练神经元输出值,输出新道路网数据和历史道路网数据的匹配度。采用非参数化离散算法,由输出层至输入层逆向传播误差信号,结合不同结构的神经元概率函数,修正网络连接权值,最小化误差信号,消除匹配度输出值和真实值之间的偏差。归一化处理输出的最终匹配度I,计算公式如公式(8)所示:

式(8)中,h为隐含层输出值;l为神经网络连接权值。将匹配度最高的新道路网数据和历史道路网数据,作为最佳匹配,确定两份数据为同名要素。至此完成新道路网数据和历史道路网数据的匹配。
1.3 检测匹配道路网数据变化
计算匹配道路网数据变化特征,检测新道路和历史道路的变化。计算道路空间变化特征,设置道路路长变化阈值,当长度相似度小于阈值,判定道路长度发生变化,否则未发生变化,若发生变化时,当L>L′,判定道路变化类型为延长,否则为缩短。设置道路路型变化阈值、方向变化阈值、距离变化阈值,当形状相似度小于路型变化阈值时,判定道路发生局部形变,否则未发生变化,当方向相似度小于方向变化阈值时,判定道路发生旋转变化,否则未发生变化,当距离相似度小于距离变化阈值时,判定道路发生位置变化,否则未发生变化。通过道路弧段结点度,衡量道路结点是否发生变化,其结点度V计算公式如公式(9)所示:

式(9)中,C、C′分别为新数据和历史数据中道路弧段的结点度,当结点度大于0时,判定道路结点度增加,结点度小于0,判定道路结点度减小,结点度等于0,则判定道路结点度保持不变。分析道路属性变化特征,包括宽度、名称、材质、等级、车道数等附属信息,通过字符相加形式,把道路所有属性值,都合并到新增属性字段中。道路新增属性字段Z计算公式,如公式(10)所示:

式(10)中,Z1、Z2、L、Zn为道路各属性字段;N为道路包含的属性类别。采用重心后移规律匹配算法,计算新增属性字段的相似度,设置道路属性变化阈值,当属性相似度低于阈值时,判定道路属性发生变化,否则未发生变化。划分决策数结点为内部结点和叶结点,使其分别表示一个道路特征,以及特征对应的道路变化。采用决策树生成算法,排序道路网数据几何变化特征、属性变化特征的影响力值,根据影响力值设定决策树的结点值。影响力值K计算公式如公式(11)所示:

式(11)中,g(j,E)为第j个遥感影像样本数据中第E个道路变化特征的影响力值,S为样本数量。从大到小依次排序变化特征的影响力值,生成决策树的树形结构,递归选择最优变化特征,映射道路变化特征和变化类型,其映射关系如下:长度变化特征对应道路延长和缩短,方向变化特征对应道路旋转变化,形状变化特征对应道路局部变形,距离变化特征对应道路位置变化,结点度变化特征对应道路结点度增加、结点度减小,属性变化特征对应道路属性变化。将信息增益作为最优变化特征的选择准则,遍历遥感影像中的所有样本数据,根据决策树检测到的最优变化特征,判断并分类道路网数据变化。至此完成匹配道路网数据变化的检测,实现结合区域遥感影像,地图道路网数据变化检测分析方法的设计。
2.实验论证分析
将此次设计方法(方法1),与用于地图道路网数据变化检测分析的核密度检测方法(方法2)、贝叶斯网络检测方法(方法3),进行对比实验,比较三组分析方法的检测性能。
2.1 实验准备
选择某城市2000年基础道路网数据和2020年基础道路网数据,包括县乡道、省道、国道三类道路,将2000年数据作为历史数据,共有1426条道路,将2020年数据作为新数据,共有1883条道路,统计的道路网数据变化(如表1所示):

表1 道路网数据变化统计
三组方法分别检测该城市的道路网数据变化。选择15-20级的高分辨率遥感影像,作为提取地图道路网数据的实验对象,采集遥感影像的外界条件不同,包括夜晚场景和白天场景,阴影和光照变化较大,其比例尺和空间分辨率(如表2所示):
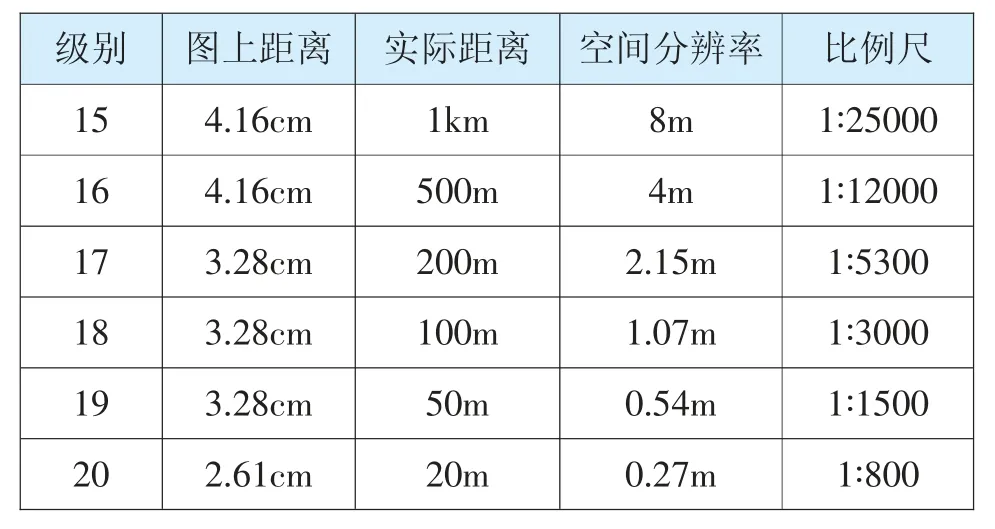
表2 遥感影像比例尺和空间分辨率
不同级别遥感影像的图像分辨率都为256×280。设计方法在遥感影像中提取道路候选区域,旋转滑动模板的检测显示(如图1所示):
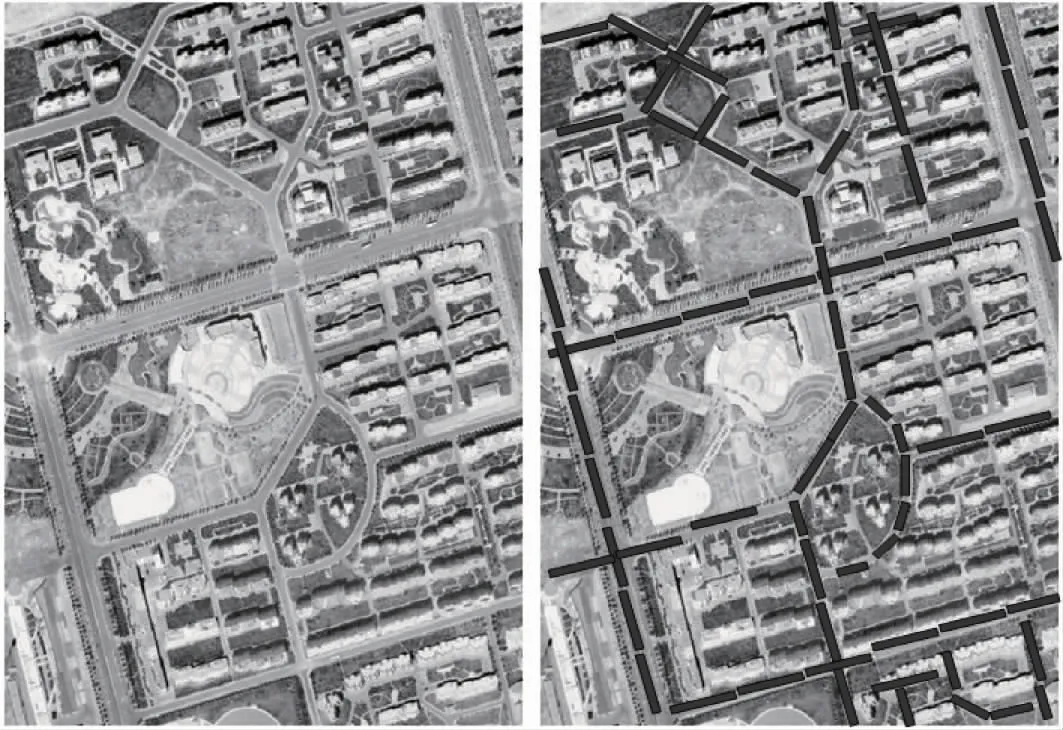
图1 遥感图像道路网数据提取
左图为用于检测的18级遥感图像,右图为使用40×10像素大小滑动模板后,提取的道路候选区域。
2.2 实验结果
2.2.1 道路检出率实验结果
针对白天场景和夜晚场景的遥感图像,比较三组方法的道路检出率,检出率C计算公式如公式(12)所示:

式(12)中,b、c分别为真实道路区域和非道路区域中,检测为道路区域的像素点个数。道路检出率的实验对比结果(如图2所示):
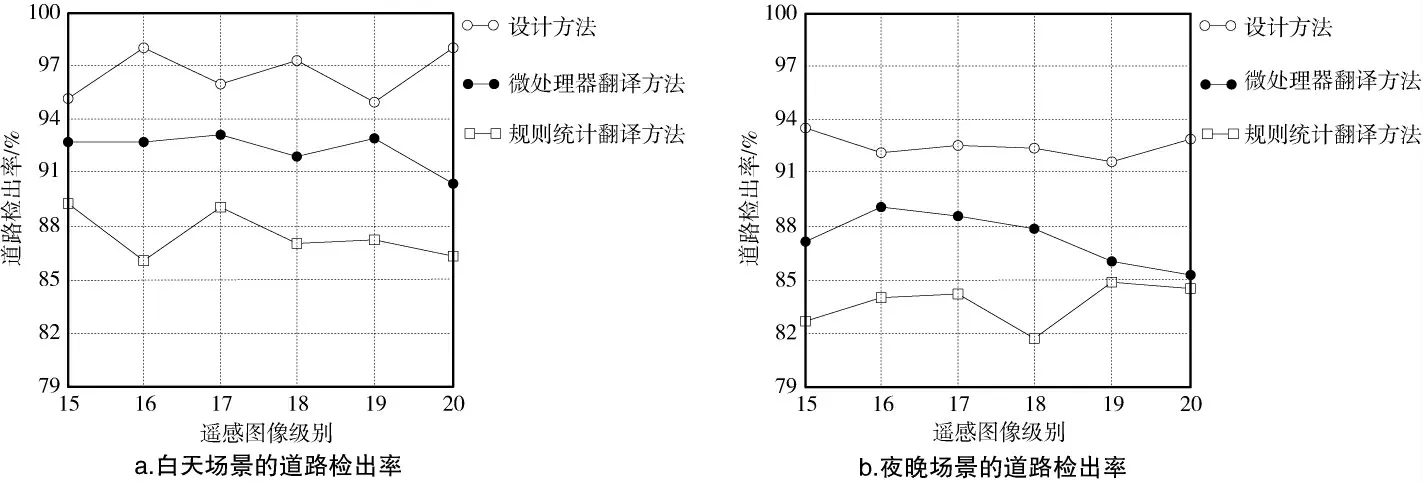
图2 道路检出率实验对比结果
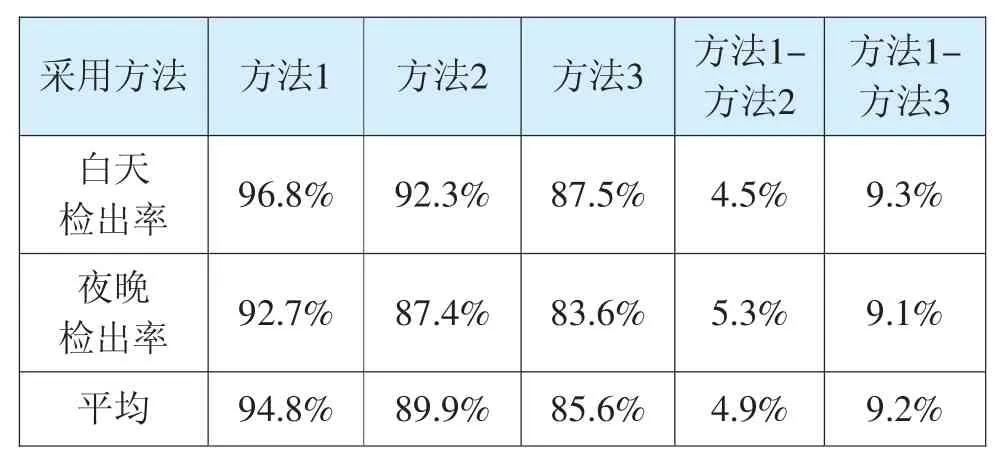
表3 道路检出率实验对比表
由图2可知:夜晚场景中的道路检出率要低于白天场景,针对白天场景的遥感图像,设计方法道路检出率均值为96.8%,相比核密度检测方法、贝叶斯网络检测方法,本设计方法道路检出率分别提高了4.5%、9.3%。针对夜晚场景的遥感图像,设计方法道路检出率均值为92.7%,相比核密度检测方法、贝叶斯网络检测方法,设计方法道路检出率分别提高了5.3%、9.1%。两个时段平均分别提高了4.9%、9.2%。
在遥感图像中提取的道路网数据,明显多于另两组方法,检测的道路区域更加全面。
2.2.2 道路检测精度实验结果
针对白天场景和夜晚场景的遥感图像,比较三组方法的道路检测精度,检测精度O计算公式如公式(13)所示:

式(13)中,O为真实道路区域中,检测为非道路区域的像素点个数。道路检测精度实验对比结果(如图3所示):
由图3可知:夜晚场景中的道路检测精度同样低于白天场景,针对白天场景的遥感图像,设计方法道路检测精度均值为98.4%,相比核密度检测方法、贝叶斯网络检测方法,设计方法道路检测精度分别提高了10.6%、16.8%。针对夜晚场景的遥感图像,设计方法道路检测精度均值为88.1%,相比核密度检测方法、贝叶斯网络检测方法,设计方法道路检测精度分别提高了5.3%、10.2%。两个时段平均分别提高了8.0%、13.5%。
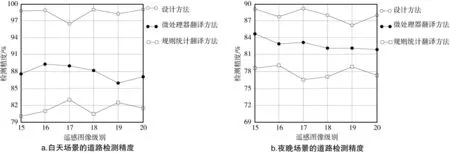
图3 道路检测精度实验对比结果
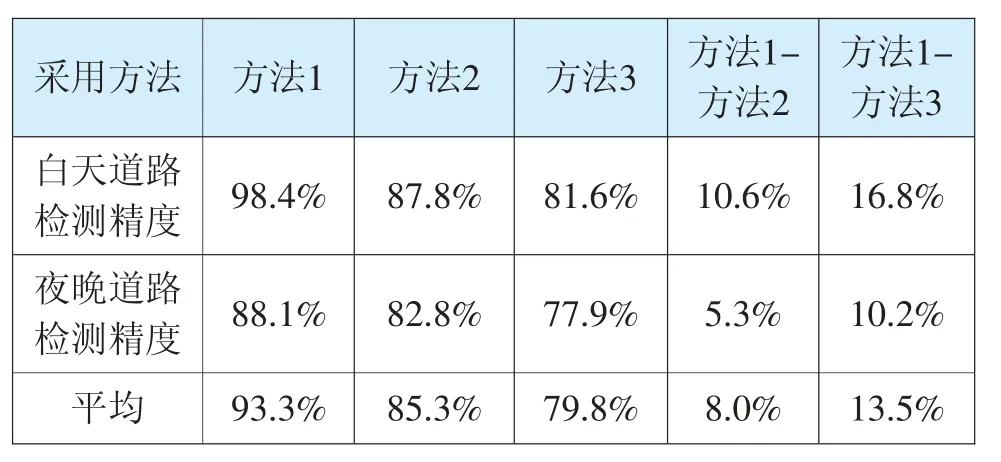
表4 道路检测精度实验对比表
在遥感图像中提取的道路网数据更加准确,充分删除了图像中的非道路区域。
2.2.3 道路变化检测精度实验结果
比较三组方法的道路变化检测精度,变化检测精度计算公式如公式(14)所示:

式(14)中,p为正确检测到发生变化,且对变化类型判断正确的道路数量;v为正确检测到未发生变化的道路数量;q为检测到的道路总数量。三组方法的实验对比结果(如图4所示):
由图4可知:设计方法道路变化检测精度均值为96.6%,对道路属性变化判断最为准确,检测精度高达98.3%,核密度检测方法、贝叶斯网络检测方法道路变化检测精度均值分别为87.1%和82.6%,设计方法道路变化检测精度分别提高了9.5%、14.0%,提高了对道路变化类型的检测准确度,检测结果更加真实可靠。
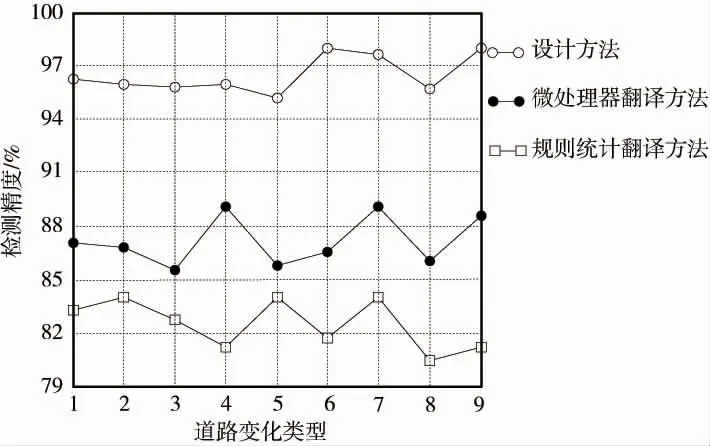
图4 道路变化检测精度实验对比结果
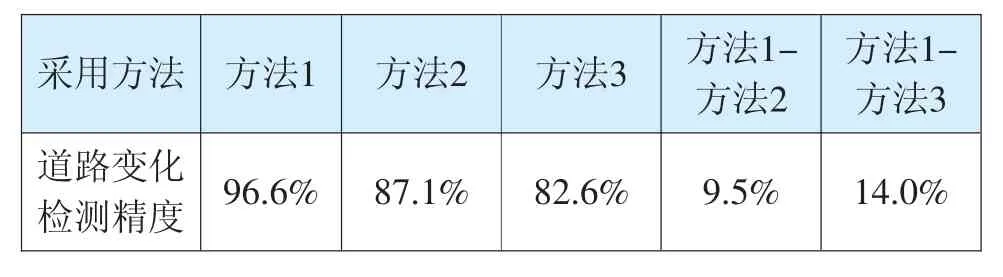
表5 道路变化检测精度实验对比表
3.结束语
此次研究结合遥感影像,设计了一组地图道路网数据变化检测方法,提高了道路检出率和检测精度,对道路变化类型的判断更为准确。但此次研究仍存在一定不足,在今后的研究中,会将道路检测过程与障碍物检测过程相融合,提升道路检测算法的准确性,使分析方法能够适应多种环境且复杂多变的道路环境。