基于徕卡TS30全站仪的桥墩平面位移 监测应用研究
2021-09-27张鸿祥刘平利王传先刘松源陈艳波
张鸿祥,刘平利,王传先,刘松源,陈艳波
(1.河南省地质调查院 河南省城市地质工程技术研究中心,河南 郑州 450001;2.河南省地质科学研究所,河南 郑州 450001)
近年来随着我国交通基础建设的快速发展,特别是高速铁路的不断延伸,高速铁路逐步形成网状分布的态势。对于高速铁路来说,支撑桥墩是最重要和最常见的基础设施之一,下穿高铁高架桥邻近高铁桥墩开挖施工,将会不可避免地对桥墩产生影响[1]。为减少基坑施工对高速铁路桥墩变形的影响,保证行车安全,通常需采取相应的措施来降低施工开挖对桥墩的影响,同时对桥墩的平面位移监测也是必不可少的重要方式。本文以中石化投建的日照—濮阳—洛阳原油管道下穿郑焦城际高铁项目为例,阐述了在邻近高铁桥墩开挖施工中,徕卡TS30高精度全站仪在桥墩平面位移监测中的应用。
1 工程概况
1.1 工程项目
为满足河南省对成品油和石油化工产品的快速增长需求,经相关部门批准,确定建设日照—濮阳—洛阳的原油管道。该项目为国家原油和成品油管网发展规划重点项目,管道起点为日照岚山区日照输油站,终点为河南省洛阳市吉利区洛阳储油库,全长796 km。管道穿越焦作市修武县境内的郑焦城际高速铁路,于新月第二双线特大桥第五孔处下穿而过,该桥孔跨径为32 m的简支箱梁,4号和5号桥墩采用圆端形实体桥墩,钻孔桩基础直径为1 m。原油管道下穿线路与铁路线之间的夹角为74 ,相交铁路桥下净空高为 7.72 m,管道距离铁路桥墩承台边的最小距离为10.32 m, 铁路上下行为双线电气化有咋轨道。项目的总体工作方案为:首先采用GPS卫星静态定位的方法对工作基点实施监测[2],并联测工作区域高铁建设时设立的CPI或CPII控制点,建立4个平面工作基点;然后在基岩或地质结构稳定的地方设立两个水准工作基点;最后在需进行监测的4个桥墩上部两侧设立8个平面监测点,在桥墩下部两侧距离地面约50 cm处设立8个水准监测点。在工程施工前后,应利用徕卡TS30高精度全站仪和天宝电子水准仪对4个桥墩同时进行平面位移和垂直位移的监测。施工现场如图1所示。

图1 施工现场
1.2 地质条件与防护结构
施工区域地处丘陵与平原过渡地带,工程范围 属于冲积平原地貌,地势平坦,地表主要为农田。地层为第四系全新统素填土、冲积粉土、中砂,其中素填土分布于地表,厚约1.8 m,黄褐色,松散;冲积粉土分布于素填土下层,厚约8~9 m,黄褐色,中密;中砂分布于冲积粉土层之下,厚约20 m,灰黄色,中密。根据资料显示,该区域地质构造活动不明显,地震烈度较小,桥址未发现不良地质作用。
在管廊明挖施工时,不同的基坑支护型将会对周边土体产生不同程度的扰动,而土体扰动可能会对已建高铁墩柱带来安全隐患[3]。根据工程地质条件,将钢筋混凝土盖板作为防护结构通过,盖板厚20 cm,宽 2 m,每块盖板长1.5 m,桥下通过总长60 m,距离原油管道顶部埋深为1.95 m。
2 桥墩平面位移监测设计
2.1 平面位移监测基准点设计
本文选取项目周围的3个稳定且满足要求的CPI或CPII控制点作为平面起算点,在施工前进行复测,并确定其可靠性。
2.2 平面位移监测工作基点设计
在监测桥墩两侧布设4个工作基点,并联测平面起算点建立水平位移监测网;再采用GPS静态观测的方法间隔观测两次,平差后取其平均值作为工作基点的初始值。平面控制网的主要技术要求和精度指标如表1所示。

表1 平面控制网的主要技术要求和精度指标
2.3 平面位移监测点设计
本文共设置8个平面位移监测点,采用徕卡 40 mm×40 mm的反射片布设于桥墩两侧上部的中间位置,如图2所示。获得工作基点的初始数据后,利用徕卡TS30高精度全站仪通过后方交会的方法进行设站;然后观测桥墩上部的平面位移监测点,取3次观测值的平均值作为初始监测点的原始数据。城市间的轨道设施作为特殊重要保护对象,其对变形的控制指标与基坑对普通道路变形的控制指标在量值上是不同的[4],根据铁路轨道交通等相关规范,本文制定的平面位移监测主要技术指标如表2所示。

图2 反射片布置图

表2 平面位移监测主要技术要求
3 徕卡TS30高精度全站仪的测量对比
3.1 徕卡TS30高精度全站仪简介
徕卡TS30高精度全站仪是四代智能型高精密测量仪器,标称测角精度可达0.5″,测距精度可达0.6 mm+1 ppm,完美地融合了高精度角度测量、高精度距离测量、四重轴系补偿系统、自动目标识别以及快速跟踪等功能[5]。在角度测量系统中,该仪器采用对径布置4个角度探测器的方式,形成了绝对连续编码,进一步消除了仪器的系统误差;抛物镜面反射角度探测技术的应用,使反射回聚焦的编码影像更清晰,能更高效地进行度盘探测和分析读取;相对于传统全站仪,该仪器提高了15%的度盘尺寸,从而使度盘分划更加均匀,精密分辨率更高。在测距系统中,该仪器将PinPoint激光脉冲技术与相位观测法整合在一起,保证了更高的测距精度;特殊的过滤反射光组件过滤了测量时的干扰光线,从而提高了测距的可靠性。该仪器特有的四重轴系补偿系统,补偿范围为4′,精度优于0.5″,支持自身补偿器校验,通过校准操作可降低仪器的系统误差,提高测量精度,对于高精度的测量尤为重要。在自动目标识别与跟踪方面,该仪器采用压电陶瓷驱动技术,能将电能直接转化为机械动能,具有加速度快且步长小、精度高和耐磨性强等特点,为仪器的智能化自动高精度定位提供了基础。徕卡TS30高精度全站仪的技术参数如图3所示。

图3 徕卡TS30高精度全站仪的技术参数
3.2 徕卡TS30高精度全站仪的监测方式
随着高精度智能全站仪在高铁测量中的广泛应用,基于自由设站的平面位移监测方法不仅能有效避免施工干扰,而且能有效保障或提升监测的精度和效率[6]。利用徕卡TS30高精度全站仪在野外进行施工测量时,根据前期收集的资料和工程施工现场的特点,确定测量施工方案为现场自由架站多点后方交会定向的方法,从而消除仪器架站时的对中误差,再采用按照桥墩监测点编号顺序观测的方式进行监测测量。
利用全站仪进行观测前,应将仪器开箱放置约 20 min,以便仪器与环境温度基本一致。仪器架站作业时,物镜视线宜高出地面和离开建筑物1.2 m以上;晴天作业时仪器应有遮阳伞遮阳,同时打开设站处放置的气压计和气温计,以便仪器观测时进行大气改正。
在本项目工作中,利用徕卡TS30高精度全站仪对监测点做了不同工作模式的应用研究。在仪器设站定向方面,传统的高铁桥墩平面位移监测方法主要包括前方交会法、极坐标法、视准线法和全圆观测法 等[7-8]。第一种方法采用传统的全圆观测法,即仪器在已知点架站并进行对中整平,将另一个控制点作为定向点进行准确定向,然后直接测量、读数、记录监测点,重复架站测量3次,对比观测的数据最大较差为2.2 mm,分析发现该方法的弊端为仪器架站必须在作业控制点上,存在每次仪器设置时的对中误差,且作业控制点受施工现场影响,不能随意选取最佳的观测地点;第二种方法采用后方交会法,在大约距观测点80 m处利用两个作业控制点进行后方交会法设站,然后直接测量、读数、记录监测点,重复架站测量3次,对比观测的数据最大较差为1.7 mm;第三种方法仍采用后方交会法,在大约距观测点80 m处利用4个作业控制点进行后方交会法设站,然后直接测量、读数、记录监测点,重复架站测量3次,对比观测的数据最大较差为1.3 mm。对上述3种测量方法进行对比分析发现,第三种方法最优。基于自由设站的基坑水平位移监测法测站摆放灵活、网形多变,采用高等级的全站仪进行观测,可达到为基坑施工快速、准确反馈变形信息的目的[9]。
项目确定运用4个作业控制点进行后方交会设站的方法后,为进一步优化设站位置对测量精度的影响,根据施工现场情况,对比了在约100 m处架站和约 60 m处架站测量得到的监测点数据。结果表明,当仪器架站处距观测点约为60 m时,所观测到的数据最稳定可靠,北向和东向观测值较平均值差值均小于 1 mm,各项误差系数较小,可有效地对桥墩的平面位移起到监测预警作用。全站仪监测数据对比如表3所示。
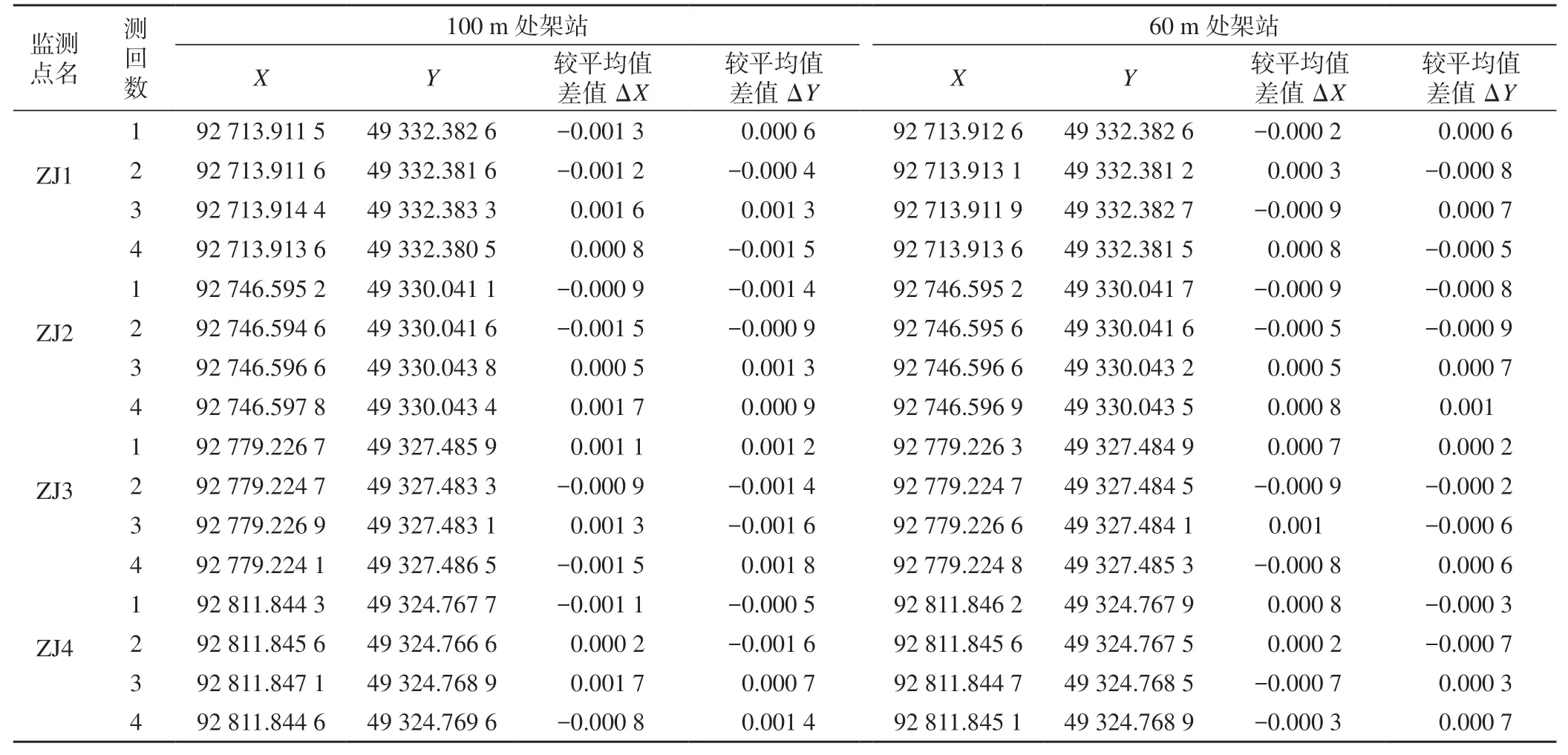
表3 全站仪监测数据对比表/m
4 结 语
本文利用徕卡TS30高精度全站仪进行城际高铁桥墩监测,经过多次不同监测方法的试验,最后确定采用4个已知控制点进行后方交会设站的方法。该方法比 较适合现场施工场地灵活的选址架站,且不会产生仪器对中误差,可保证设站时产生的各项误差较小。在设站位置相对监测点距离的测量试验中,经对比分析发现,仪器架站距观测点形成的面约为60 m时,观测得到的数据最稳定可靠,各项误差 系数较小。实验结果表明,在该类高铁桥墩平面位移监测中,应同时注意运用上述两个方面的方式方法,从而有效地对桥墩的平面位移起到监测预警作用。