轻便式全景设备在城市三维全景建设中的应用
2021-09-27黄明伟沈泉飞
黄明伟,沈泉飞,庄 旭,吴 越
(1.江苏省基础地理信息中心,江苏 南京 210013)
随着数字化技术的加速发展,城市三维全景已成为数字城市的一个重要研究方向[1-2]。传统的二维地图通常采用DOM、DLG、空间属性数据等实现对空间信息的表达,但这些数据对场景的直观性较弱[3];城市三维模型通常采用多种建模手段达到实景效果,但建立三维模型的工作量大、生产周期长、制作成本高[4];而通过全景图构建的三维场景具有真实性强、对播放设备要求低、开发周期短、交互性强、画面质量高等特点,能以多角度、全方位和动态的形式体现在地图上,图文并茂地提供地理实体的空间信息[5-6]。
目前,全景数据采集系统通常采用车载全景移动测量技术,以车辆作为硬件载体,快速获取全景高清图像数据和定位数据,并提供高效的城市三维全景建设解决方案[7-8];但受体型庞大的限制,一些狭窄的街道、公园、小区、景区、室内场景等场所,采集车无法进入[9]。轻便式全景设备具有便携、轻巧、实用性强等特点,能对狭窄街区、室内场景等特殊地理空间进行全景数据采集,弥补了车载全景移动测量技术空间覆盖范围不足的缺点;且将其挂载于低空无人机平台上,能实现空中全景数据的快速获取,提供更为快速、灵活、机动的城市三维全景建设解决方案[10-11]。本文开展了快速构建城市三维全景的研究,设计了轻便式全景设备的数据采集方案,实现了数字城市中的三维全景展示。
1 轻便式全景设备技术工作流程
作为数字城市的重要技术手段,轻便式全景设备技术利用地面单站式全景以及挂载于低空无人机平台等硬件设备,获取真实、完整的三维空间影像数据。基于轻便式全景设备的城市三维全景建设技术路线如图1所示。

图1 城市三维全景建设技术路线图
轻便式全景设备由4~8个鱼眼镜头组成,可获取8 K及以上的超清画质图像,采用无缝拼接技术实现全景图的快速展示;当挂载于无人机平台时,可组成空中全景设备,快速采集空中全景数据。轻便式全景设备如图2所示。

图2 轻便式全景设备
1.1 数据采集
在数据采集过程,轻便式全景设备实现了对图像和GPS定位数据的同步采集。采集图像时,在每个场景一次采集多张鱼眼图像,每张图像水平视角为120 ,垂直视角为180 。对于地面全景数据采集,无干扰常规步行速度为5 km/h,每个场景的平均采集时间为10~20 s,按照每10 m一个场景计算,每小时采集频率为100~150 个场景;对于空中全景数据采集,覆盖范围的半径为5 km,无干扰巡航速度约为50 km/h,参照项目技术设计,布设空中场景位置。全景数据采集的要求为整体布局、全面覆盖,反映特点、突出重点。具体实施步骤为:
1)实地踏勘。根据项目要求和城市地形特点,确定需要进行全景数据获取的区域,并对目标区域进行实地踏勘。
2)采集方案设计。拟定采集方案和实施计划,以便于数据获取工作能够有条不紊的实施。
3)实地作业。为了保证图像清晰,实地作业应尽量减少流动物体(如人、车)的遮挡,且图像数据采集应尽量选择天气晴朗的中午进行。
1.2 数据处理
首先对拍摄的原始图像进行数据预处理,再进行图像拼接生成场景全景图,并将全景图进行图像修饰,然后设计全景漫游路线和构建全景展示平台,最后实现时空信息云平台上的城市三维展示。主要数据处理步骤为:
1)原始数据处理包括图像数据和GPS定位数据处理、涵盖图像文件名处理、图像剔除、GPS数据预处理、GPS 数据与图像匹配等。
2)图像拼接。采用图像拼接软件对同一时刻同一点位上获取的不同方向的多张图像进行调色、拼接处理,形成带有方位和空间坐标信息的全景图。为保证软件输出的图像质量,对所有场景的全景图进行拼接质量检查与错误纠正。
3)图像修复。轻便式全景设备易因搭载平台(脚架或无人机)遮挡场景中的地面或天空部分,而产生全景图中地面或天空的数据缺失。通过图像合成技术,对存在数据缺失问题的全景图进行局部图像修复。
4)人脸车牌模糊。对全景图像涉及的个人隐私,作模糊化处理。实地数据获取时,注意避免人流量与车流量的高峰时段;筛选数据中存在人脸和车牌的全景图,进行局部模糊处理。
5)数据漫游。虚拟场景由不同类型、不同位置的全景站点组成。制作全景漫游,需要设计最佳浏览视角,提供相关的热点链接和箭头指示,以实现场景切换以及电子地图与全景场景的联动。
6)数据发布。通过Web端面数据服务技术,实现全景数据漫游的发布,满足广泛用户群体的交互需求。
2 应用实践案例
本文选取江苏省淮安市蒋坝镇作为实验区域。蒋坝镇是洪泽湖大堤最南端的古镇,始于东汉、兴于明万历年间,是典型的因造堤而兴的集镇,是具有典型江南水乡建筑风格的文化古镇,建筑物密集、水利发达、交通便利。
2.1 全景数据采集
蒋坝镇的覆盖面积为2 km2,覆盖距离为5 km。本文采用地面全景设备与低空无人机相结合的作业方式采集数据,其中地面全景设备采用Insta 360 Pro2,搭载GPS定位、INS惯性导航系统;低空无人机采用DJI M600 Pro机型,该机型为六旋翼、外接镜头载重上限为5 kg。
通过实地踏勘,对蒋坝镇重点区域进行数据采集。全景数据覆盖主街道、古镇老街、沿湖观光带、功能娱乐区等,紧密围绕蒋坝镇的地理位置、历史文化、人文经济等因素进行相关数据采集。地面全景场景按10~20 m的间隔实现全景数据全面覆盖;空中全景场景根据蒋坝镇功能区情况,覆盖关键场景;考虑到蒋坝镇夜景灯火辉煌、流光溢彩的特点,采集主街道的夜晚特色全景数据。全景数据采集场景总计123个(地面118个、空中5个)。蒋坝镇全景场景分布如图3所示。

图3 蒋坝镇全景场景分布情况
2.2 全景数据处理
蒋坝镇全景数据处理重点解决全景图像拼接错位、狭窄街道引起的空间景观阴影和色调不一致、全景图天空信息缺失等问题。
1)全景图像拼接错位问题。通过重新定义图像间的匹配关系,解决全景图中错位的图像信息。处理方式主要包括拼接线编辑、同名点编辑、参数纠正3个方面。
2)狭窄街道引起的图像空间景观阴影和色调不一致问题。一方面,通过控制数据获取时间、天气状况、场景曝光等参数,结合高动态范围成像手段,保证原始图像数据的成像质量;另一方面,利用图像匀光匀色技术,解决图像局部区域曝光不正确与图像间的色调差异问题。
3)全景图天空信息缺失问题。由于天空被无人机遮挡,导致全景图天空信息缺失。采用图像合成技术,将曝光、色调正常的天空图像替换全景图问题部分,处理结果如图4所示。

图4 全景图“问题天空”修复
2.3 全景数据成果
蒋坝镇全景漫游成果挂载在电子地图平台,以Web端数据服务的方式在网络上传输,实现了地图实景三维浏览体验,提供了更加真实准确、更具画面细节的深层次地图服务。
根据镇区的主体功能区划分,蒋坝镇全景展示平台设计了科学合理的漫游路线;平台界面设置了主视窗、缩略图导览窗、主视图切换工具栏、地图导览工具、列表导览工具;全景图的场景间均设置了导航箭头,实现了场景切换功能。蒋坝镇全景展示平台如图5所示。
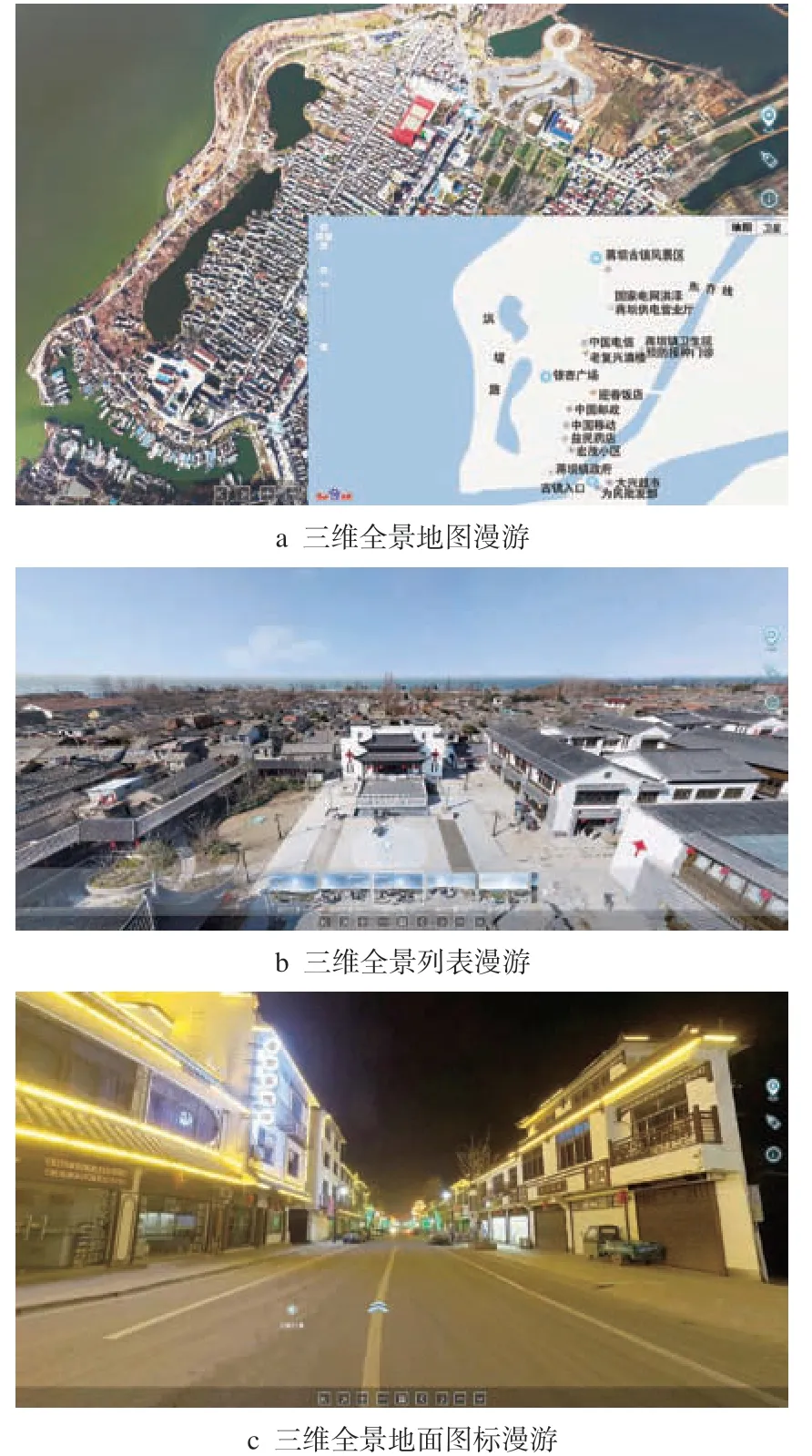
图5 蒋坝镇三维全景展示平台
3 结 语
目前,三维全景技术已在很多方面得到了广泛应用,旅游、考古、交通、餐饮、房产等领域均能看到全景技术的影子。轻便式全景设备技术丰富了全景图的采集方式,提升了特殊环境下的采集效率,是车载移动全景系统的一个有效补充,二者共同构成了 一个完整的城市三维全景架构体系,提供了从地面到空中的一体化可视化方案。本文以轻便式全景设备技术在城市三维全景建设中的应用为例,阐述了全景图的采集与处理过程,实现了城市主要道路和著名景点的全景覆盖;并结合天地图、百度地图等地图平台,以Web端数据服务的方式在网络上传输,提供了直观的三维效果,丰富了空间地理信息的传输内容。