轻型越野车P2混合动力构型研究
2021-09-26孙国庆,李良波,施胡滨,刘刚
孙国庆,李良波,施胡滨,刘刚

摘 要:混合动力技术是当前越野车领域的重要发展方向。论文根据某轻型越野车设计需求,基于对各混合动力构型的分析,提出了适合该轻型越野车的P2路线。针对该型P2混合动力越野车,首先根据车辆功能要求及P2构型特点,定义整车功能;根据整车功能需求,通过理论计算初步选定动力系统参数,然后利用AVL Cruise & Matlab/simulink进行了整车动力性经济性联合仿真,最终达成整车动力性经济性设计指标。论文对越野车混合动力构型开发具有一定的指导作用。
关键词:越野车;混合动力;P2;AVL Cruise
中图分类号:U462.2 文献标识码:A 文章编号:1005-2550(2021)04-0070-05
Researched on P2 hybrid configuration of light Off-road Vehicle
SUN Guo-Qing, LI Liang-bo, SHI Hu-bin, LIU Gang
(Dongfeng off-road vehicle Co., Ltd, Wuhan 430058, China )
Abstract: The hybrid technology is an important development direction in the field of off-road vehicle at present. According to the design requirements of a light off-road vehicle, based on the analysis of the current hybrid technology route, the paper proposed P2 configuration which is suitable for the light off-road vehicle. To the P2 hybrid light off-road vehicle, firstly, the whole vehicle function is defined according to the vehicle function requirements and P2 configuration characteristics; according to the vehicle function requirements, the powertrain parameters are preliminarily selected through theoretical calculation, and then the vehicle dynamic and economic joint simulation is carried out by using AVL Cruise & Matlab / Simulink, the vehicle power and economy design index is achieved Finally. This paper has a certain guiding role on the development of hybrid vehicle configuration.
1 概述
随着国家油耗、排放法规的不断升级及国家能源战略方向的引导,新能源汽车得到了快速发展。在纯电动技术尚未取得重大突破之前,混合动力系统逐渐成为各大汽车公司重点发展的技术方案。越野车工作环境恶劣,工况复杂,对动力性要求高;而主要适用于普通民用车辆的油耗法规则是民用越野车发展的一大技术难题。在传统发动机技术难以取得突破的情况下,混合动力技术是解决民用越野车油耗问题的一条重要途径。
某轻型越野车为4×4全时四驱民用车辆,整车设计指标如下:
(1)最高车速Vamax≥140km/h;
(2)最大爬坡度tanαmax≥60%;
(3)0~100 km/h 加速时间t≤18s。
(4)车辆最大设计总质量5.6t。根据对重型商用车四阶段油耗限值法规的预测,同时考虑一定的余量,要求满足C-WTVC循环工况油耗≤11L/100km。
基于对该轻型越野車传统动力车型的动力性经济性研究,确定在现有整车边界条件下无法达成油耗限值要求,整车考虑采用混合动力路线。
2 混合动力构型分析
混合动力汽车有多种分类方式。按动力系统结构形式划分,可分为串联式、并联式、混联式三类;按照是否外接充电可分为插电式和非插电式;按照混合度划分,可分为微混、轻混、中混、重混等形式……按可再充电能量存储系统类型、技术特征、燃料类型、功能结构和车辆用途等,还有其它划分方式[1]。当前,行业内应用最广泛的是按动力系统结构形式分类。
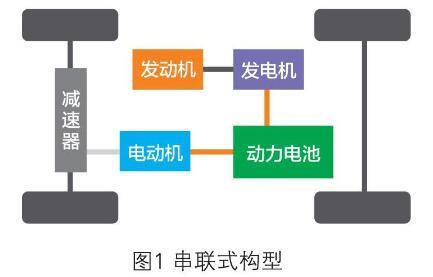
2.1 串联式
串联式混合动力的最主要特点是发动机不直接参与驱动,只驱动发电机发电,电机是唯一驱动源,串联式构型如图1所示。串联式优点如下:1.发动机不直接与机械系统相连,发动机的工作状态相对独立,由此可将发动机设定于最佳效率点工作;2.在电量保持模式下主要由发动机驱动,当需求功率较小时发动机关闭,由动力电池提供电能,这样可避免发动机的工作点波动,保证发动机工作于最佳效率点。但串联式也有其劣势:1.发动机没有直接参与驱动,所以在机械能-电能-机械能的转换过程中,会有功率损失,在高速行驶时,油耗会偏高;2.由于驱动电机要满足所有的动力性要求,电机的功率、体积会偏大。
串联式的应用主要集中在市区工况比较多的乘用车和客车。典型代表车型有:日产E-Power;雪佛兰VOLT;BMWi3增程版;广汽传祺GA5增程版;理想one等。
2.2 并联式
并联式混合动力根据电机位置的不同,又分为P0、P1、P2、P2.5、P3、P4等构型(P, Parallel,并联式),如图2所示,P0~P4用来区分各种有变速箱的并联混动构型。并联式混合动力大量成熟产品已经投放市场,欧系企业应用较多,总体上依赖成熟的自动变速箱技术,易于平台化,但由于轴向空间的问题,前驱车型挑战大。
P0:电机位于发动机前端轮系上。P0一般只应用于自动启停系统,以及12-25V微混和48V弱混。
P1:电机位于发动机曲轴上。电机固连在了发动机上,电机不能单独驱动。在制动能量回收和滑行模式下,也因为必须带动曲轴空转而浪费能量并增加噪音和振动。P1沒有纯电行驶模式,不适用于强混系统。
P2:电机位于发动机与变速箱之间,位于离合器之后。电机与发动机之间有离合器,因此可以单独驱动;在制动能量回收时也可以切断与发动机的连接;同时还能与现有的变速箱很好的集成。因此P2是目前市面混动车型采用最多的模式。
P2.5:电机集成于变速箱内部,功能同P2类似。电机可布置在变速箱侧面,轴向尺寸容易控制,但径向尺寸会增加。电机扭矩不受变速箱输入轴扭矩限制,但控制较为复杂。P2.5应用不多,主要应用在本田、比亚迪等车型上。
P3:电机位于变速箱输出端。因为电机必须与车轴相连,因此电机无法用于启动发动机;且发动机扭矩经变速器放大后,为了保证发动机/电机的扭矩比,电机需要输出的扭矩就非常大,因此它的尺寸、重量就会增加。P3全球量产只有比亚迪秦2014款,比亚迪现已放弃P3构型。
P4:电机放在后桥上,另外轮边驱动也叫P4。P4布局最大的特点是,电机与发动机不驱动同一轴,这意味着:1.车辆可以实现四驱;2.电机与发动机实际上是通过地面耦合,在车辆内部不存在任何机械连接。P4大多应用于各种插电混动或者是弱混模式。
2.3 混联式
混联式混合动力兼有串联、并联的特点,主要有功率分流式(PS,Power Split)及双电机串/并联式(P/S)。目前,业内主流观点认为最好的混合动力技术是PS技术,丰田的THS技术、通用汽车的Voltec等采用此种技术模式。但受限于丰田将单行星排、双电机系统申请了专利;通用汽车将双行星排、双电机系统申请了专利;凯迪拉克将三行星排、双电机电驱动系统申请了专利,其它企业能够介入PS技术的产品不多。
双电机串/并联构型(P/S)动力性一般,经济性较好(发动机需针对性优化),平顺性较好;机械系统简单,容易集成,相对容易平台化,可以方便的实现HEV、PHEV间的传动系统共享。但双电机系统成本高,效率低,NVH挑战大,总体处于验证中。本田的i-MMD系统是其典型代表,国内代表车型有上汽荣威e550;长安CS75 PHEV等。
3 P2构型的提出
越野车特别是硬派越野车,由于其行驶地域的特殊性,插电混动对其意义不大,常用油电混动即非插电式实现改善车辆动力性经济性的目的。由于其前置四驱特性,考虑到车辆轴向布置空间,串/并联双电机布置形式难以实现;同时功率分流式又受制于部分企业的技术垄断,故混联式混合动力在越野车上应用困难。
串联式四驱越野车主要形式有桥电机、轮边驱动、轮毂电机等形式。桥电机对于前置四驱越野车前桥总布置有很大挑战,目前应用很少;轮边驱动、轮毂电机技术尚不成熟,轮边驱动少量应用在客车上;轮毂电机的簧下质量是困扰其发展的技术难题,但因为其整体优越的性能,在军用越野车上得到重视,但多数处于技术预研阶段。
并联式混合动力构型动力性好,同时兼顾经济性,并联式构型在越野车上有很好的应用前景。各混合动力构型动力性经济性对比如表1所述:
基于以上对各混动构型的分析,综合考虑成本、现有供应商资源等否决项因素,该轻型越野车混合动力方案优选基于AT的P2构型。
4 整车动力性经济性仿真
4.1 整车功能概述
基于AT的P2混动变速箱开发思路如图6所示。考虑到发动机的扭转振动对底盘的冲击,发动机飞轮端需加扭转减振器来衰减振动。
该轻型P2构型越野车功能需求如下:常规行驶时,由发动机提供能量;急加速或车辆有较大扭矩需求时,由发动机、电机共同驱动;低速、怠速行驶时,进入纯电模式。由此,可初步计算动力系统参数。
4.2 动力系统初步选型
通过理论计算[2-5],初步选定的发动机、电机、动力电池等主要参数如表2所示:
4.3 整车动力性经济性仿真
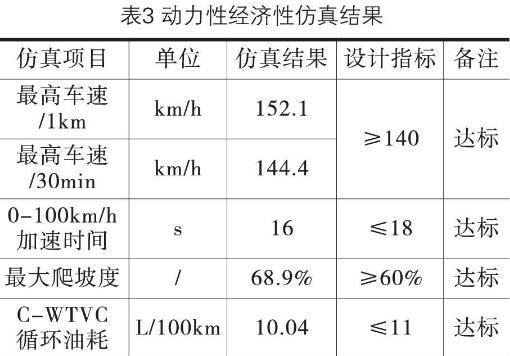
用AVL Cruise软件建立P2混动越野车动力性经济性仿真模型,用Matlab/simulink模块设置仿真控制策略,根据《GB/T 19752-2005 混合动力电动汽车动力性能试验方法》[6]及《GB/T 19754 -2015 重型混合动力电动汽车能量消耗量试验方法》[7]设置动力性经济性计算任务。基于AVL Cruise与Matlab/simulink的DLL接口或API接口,开展AVL Cruise & Matlab/simulink联合仿真。
反复优化控制策略,使发动机和电机工况点尽可能处于高效区。同时根据《GB/T 19754-2015 重型混合动力电动汽车能量消耗量试验方法》规定,使动力电池的SOC平衡误差处于规定范围内,仿真结果如表3所示。由表3可知,动力性经济性各项指标均达标,仿真结果证实了P2构型选择的合理性。
5 结束语
论文基于某轻型越野车设计需求,分析了混合动力各构型特点,提出了适合某轻型越野车的P2构型。论文定义了P2混动越野车的功能模式,通过理论计算初步选定了动力系统参数,并基于AVL Cruise & Matlab/simulink软件开展了动力性经济性仿真。仿真结果表明,P2构型能满足该型越野车整车动力性经济性指标。论文对轻越野车混合动力构型开发具有一定的指导作用。
参考文献:
[1]QC/T 837-2010 混合动力电动汽车类型.
[2]余志生.汽车理论[M].第五版.北京:机械工业出版社,2009.
[3]彭莫,刁增祥.汽车动力系统计算匹配及评价[M].北京:北京理工大学出版社,2009.
[4]崔胜民.新能源汽车技术解析 [M].北京:化学工业出版社,2017.
[5]孙国庆,孟建军,叶建伟等.基于Cruise的越野车动力匹配技术研究[J].汽车科技,2018(5):29-33.
[6]GB/T 19752-2005 混合动力电动汽车动力性能试验方法.
[7]GB/T 19754-2015 重型混合动力电动汽车能量消耗量试验方法.
孙国庆
毕业于天津大学,硕士研究生,现就职于东风越野车有限公司,任整车产品定义及性能集成主管工程师,主要研究整车动力性经济性开发,已发表论文2篇。
