纯电动汽车集成控制器低压采样干扰问题改善
2021-09-26陈鹏,李海波,吕鉴武,赵建华,罗凡
陈鹏,李海波,吕鉴武,赵建华,罗凡


摘 要:为改善搭载集成式电驱动系统的某纯电动汽车开发过程中出现的动力丢失问题,通过故障FTA分析、实车静态和动态的验证,发现高转速工况下整车EMC对集成控制器的低压采样存在干扰。通过对集成控制器的硬件和控制策略进行优化分析,并进行了台架测试、板级测试和整车试验验证,得出了软硬件协调优化能有效抗干扰的结论。降低了今后新项目的开发风险,节省了新项目的开发周期和开发费用。
关键词:纯电动汽车;集成式电驱动系统;低压采样;抗干扰
中图分类号:U469.72+2 文献标识码:A 文章编号:1005-2550(2021)04-0038-05
Improvement Of Low-voltage Sampling Interference Problem Of Electric Vehicle Integrated Controller
CHEN Peng , LI Hai-bo , LV Jian-wu , ZHAO Jian-hua , LUO Fan
( Dongfeng Motor Corporation R&D Center,Wuhan 430058, China )
Abstract: In order to improve the problem of power loss during the development of a electric vehicle equipped with an integrated electric drive system, through fault FTA analysis, static and dynamic verification of the real vehicle, It was found that the EMC of the whole vehicle interferes with the low voltage sampling of the integrated controller under high speed conditions. Through the optimization analysis of the hardware and control strategy of the integrated controller, and carried out bench test, board level test and vehicle test verification, the conclusion that the coordinated optimization of software and hardware can effectively resist interference is obtained. It reduces the development risk of new projects in the future, saves the development cycle and development costs.
Key Words: Electric Vehicle, Integrated Electric Drive System, Low Voltage Sampling, Anti-interference
1 前言
纯电动汽车具有高效率、低噪声、零排放等显著优点,在环保和节能方面有着不可比拟的优点,其应用和普及已成为汽车工业可持续发展的必然趋势[1]。车载电驱动系统是电动汽车的关键核心技术,随着机电一体化技术的快速发展,高度集成的电驱动系统成为了研究与设计的热门方向,其具有成本低、布置灵活等优势[2]。然而当电驱动系统的集成度较高时,集成单元的安全性和可靠性容易受到影响,这对集成式电驱动系统的电磁兼容性和智能化控制提出了更高的要求[3]。
本文以搭载集成式电驱动系统的某款纯电动轿车为研究对象,针对集成控制器低压采样受干扰的问题,通过故障FTA分析、实车静态复查和动态验证,锁定了故障原因,并对集成控制器的硬件和控制策略进行优化分析,同時通过了台架测试、板级测试和整车试验验证,解决了故障问题,并有助于降低今后新项目的开发风险,节省了开发周期和开发费用。
2 问题产生
某新开发EV车型搭载的集成控制器将整车控制器(VCU)、电机控制器(MCU)及DC-DC转换器集为一体。在整车可靠耐久性试验过程中,车辆在高环上高速行驶时出现多次动力丢失,且仪表上蓄电池和电机故障灯点亮,下电后再次上电仪表显示恢复正常,如下图1所示:
由图1仪表界面显示可知,在高环行驶过程中出现动力丢失且高压断电的现象,同时仪表上故障灯被点亮,当前档位在D档,车速为140km/h。车辆无动力高速滑行容易导致永磁同步电机的反电动势失控,从而引起IGBT被击穿,集成控制器烧毁等不良后果[4]。为了避免集成控制器被损坏,需要确定该故障发生的原因并提出解决方案。
3 原因分析
针对高环行驶动力丢失的故障现象,结合整车控制策略,对其进行FTA分析[5],列出所有可能引起动力丢失的原因,并逐项梳理分析,如图2所示。
通过图2的FTA分析,梳理出六种可能的原因,并分别在车辆处于静态和动态的情况下进行故障原因复查。
当故障车辆处于静态时,检查电池包状态良好,排除进水或电芯漏液等故障原因,同时复查车辆网络状态、低压线路及控制器硬件器件状态情况,如下图3所示。通过状态复查,发现CAN网络通讯和静态低压供电均正常、同时集成控制器硬件完好无损坏。可以排除CAN网络质量、CAN线短断路、低压线束短断路及集成控制器硬件器件损坏等故障原因。
再次进行整车故障再现试验,安装数据采集仪跟车采集CAN网络数据,捕捉故障现象。如图4所示。
从图4可知,车速120km/h左右,再次出现了动力中断的现象。对CAN网络采集的数据进行分析,发现电机系统和VCU均报高等级故障,VCU保护性降低扭矩至0Nm,随后高压断电。在此期间,DCDC稳定输出大于12.5V的供电电压,保证了蓄电池的充电需求,同时在驾驶过程中未开启大负载低压电器,故实际的蓄电池电压应保持稳定,然而CAN上采集到的蓄电池电压瞬断至7.5V左右,这说明控制器的低压采样受到了干扰。综合上述数据和现象,可以将高环动力中断的原因锁定在动态工况下硬件低压采样电路受干扰和控制器低压馈电保护上。
4 解决对策
针对集成控制器低压采样电路受干扰及低压馈电保护策略导致的动力中断问题,分别对控制器的硬件电路和软件控制策略进行优化。
4.1 集成控制器硬件优化
集成控制器低压采样电路在整车高转速工况下容易受到电磁干扰从而造成采样电压的波动,通过在原有的硬件电路基础上增加稳压电容C1,并修改了滤波电阻R1的阻值,增强了电路的电磁抗干扰能力[6],如下图5所示。
根据上图5(a)、(b)所示,在硬件电路优化前后分别在测功机台架上模拟整车高速工况,监测集成控制器输出的电压波形,如图6所示:
图6(a)所示,优化前集成控制器低压采样电路输出的电压VCU_BatteryVoltage在高转速下出现异常波动,电压从11V波动到7.84V,这是因为在高转速大扭矩的工况下,较大的母线电流及IGBT等功率元器件高速的开通关断会产生较强的电磁干扰,而优化前的硬件电路抗EMC干扰能力较弱,导致低压采样电压产生较大的波动;按图5(b)所示对集成控制器低压采样电路完成优化后,增加的电容C1能够滤掉电压信号中大部分交流成分,电容C2进一步进行滤波,使输出的电压稳定,同时减小R1的阻值能够减少通过电阻的电压降,使进入AD采样的电压值更真实,这些改进均可增强低压采样电路的抗EMC干扰能力。如图6(b)所示,试验数据中输出的电压在高转速下波形平滑,无异常波动。因此硬件电路优化后对采样电压的抗干扰能力有显著提升。
4.2 控制策略优化
由于低压采样电路受干扰采集到较低的蓄电池电压,导致控制策略触发低压保护,进而使得驱动电机的扭矩受到限制,出现动力丢失的问题。因此需要在整车控制策略上针对硬件采集的电压信号进行滤波处理,降低敏感度,屏蔽低压异常波动,同时需要确保在行车过程中如果出现真实低压掉电现象,VCU能够进入保护控制策略,限制驱动功率为0,并发送维持高压状态指令。在Simulink中搭建电压过滤仿真模型并进行仿真,如图7所示:
根据图7(a)搭建的Simulink仿真模型,用Signal Builder模拟电压的异常波动,由图7(b)可知,經过低压滤波计算后,在标定时间内可以保证输出高于控制器工作所需的9V电压,确保控制器能够屏蔽硬件电路上传来的异常电压波动,在非真实低电压情况下不会触发保护策略,使车辆不出现动力丢失,高压下电的故障。由图7(c)可知,当出现真实的低压异常现象时,输入电压经过滤波优化后,在标定的时间内输出最低标定电压,超时后即输出实际的低电压,并上报故障码。
4.3 试验验证
将仿真验证后的策略模型集成到整车控制策略内,并将代码刷写到已硬件优化后的集成控制器内,通过CANoe进行桌面测试验证,如图8所示:
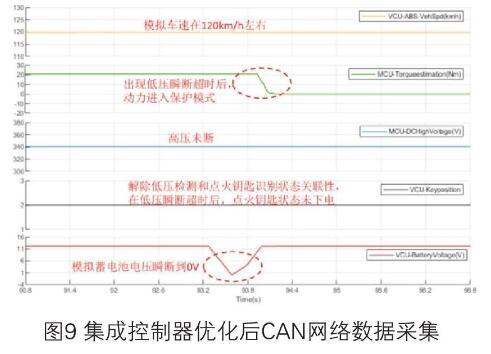
通过CANoe模拟发布电池、电机、附件等报文信息,使控制器在虚拟环境下实现高速动态验证,观测CAN报文发现将开关电源电压关断后,控制器实现动态保护策略,保证高压未掉,如图9所示:
由图9可知,通过在CAN上发布蓄电池电压瞬断到0V的报文来模拟蓄电池电压的异常波动,发现在整个低压异常的过程中,点火钥匙状态均未下电,且VCU在判断低压瞬断超时后进入保护模式,限制驱动功率输出到0,并维持高压状态。说明集成控制器软硬件优化后板级测试通过。
为了进一步验证优化后的集成控制器在实车驾驶环境下的可靠性,将其装车并进行可靠耐久试验。试验工况里程分布如图10所示:
在襄阳进行的可靠、耐久试验从改善该质量问题开始,3台样车验证总里程达50166km,同时PSQC[7]捉虫试验2台样车验证总里程达38000km,试验车辆再未出现过该故障,说明对集成控制器进行软硬件优化后收效显著,整车试验验证通过。
5 结论
本文针对某款纯电动汽车高环行驶过程中出现动力丢失的现象,通过故障FTA分析、实车静态复查和动态的验证,确定了集成控制器低压采样受干扰的问题,同时对集成控制器的软硬件都进行了优化设计,并通过了台架测试、板级测试和整车试验验证,使该故障问题得到了有效的解决,同时降低了今后新项目的开发风险,节省了开发周期和开发费用。
参考文献:
[1]刘卓然,陈健,林凯,赵英杰,许海平.国内外电动汽车发展现状与趋势[J].电力建设,2015,36(07):25-32.
[2]张罗曦. 电动车用集成式驱动系统的研究[D].武汉理工大学,2010.
[3]卢文轩,严星,陈平,裴潇杨,张自立,卢俊康.纯电动汽车电驱系统集成化前沿趋势[J].汽车工程师,2019(10):16-18+59.
[4]原志强,傅雪军,常城.大功率永磁直驱机车反电势的研究[J].铁道机车车辆,2019,39(06):46-49.
[5]卜全民,王涌涛,汪德爟.事故树分析法的应用研究[J].西南石油大学学报,2007(04):141-144+200.
[6]王芳.提高印制电路板的抗干扰能力及电磁兼容的措施[J].信息技术,2009,33(07):174-177+180.
[7]杨菁然.PSQC活动在新产品开发中的应用[J].湖北汽车工业学院学报,2009,23(04):78-80.
陈 鹏
毕业于武汉理工大学,硕士研究生,现就职东风汽车集团有限公司技术中心智能软件中心,任辅助工程师,主要研究方向为汽车电控。
