基于Simulink & PreScan的自适应巡航建模与仿真
2021-09-26韩晶,贺庚,马锦波,何烈永,刘珂
韩晶,贺庚,马锦波,何烈永,刘珂

摘 要:智能辅助驾驶越来越多的得到应用,尤其自适应巡航系统的应用,能够在一定程度上减少驾驶员的驾驶强度。本文设计了一套自适应巡航系统,使用Simulink进行了模型搭建,并用PreScan软件针对特定场景进行了仿真。自适应巡航系统的成功实现,是汽车自动驾驶的重要步骤。
关键词:自适应巡航系统;Simulink;PreScan
中图分类号:U471.15 文献标识码:A 文章编号:1005-2550(2021)04-0080-07
Adaptive Cruise Modeling and Simulation Based
on Simulink & PreScan
HAN Jing, HE Geng, MA Jin-bo, HE Lie-yong, LIU Ke
( Ningbo Yinzhou DLT Technology Co. Ltd, Ningbo 315000, China )
Abstract: Intelligent assisted driving is increasingly applied, especially the application of adaptive cruise system, which can reduce the driving intensity of the driver to a certain extent.This paper designed a set of adaptive cruise system, used Simulink to build the model, and simulated the specific scene with PreScan software.The successful realization of the adaptive cruise system is an important step for auto autonomous driving.
随着自动驾驶技术的发展,自适应巡航控制(Adaptive cruise Control,ACC)应用在一定程度上减少驾驶员的驾驶强度,是车辆辅助驾驶技术的一个重要组成部分。本文主要讲解2个方面内容:ACC控制策略的设计,ACC控制策略的仿真验证。
1 汽车自适应巡航控制系统
汽车自适应巡航控制(Adaptive Cruise Control ,ACC)系统是在定速巡航控制系统基础上发展起来的新一代汽车先进驾驶辅助系统。在工作过程中,通过安装在前部的传感器持续感知汽车前方的行驶车辆或道路状况,采集相关信息,计算得到车距信息,结合车速传感器采集的自身车速信息,综合对汽车的纵向行驶速度进行控制。当主车与前车之间不在安全时距范围时,ACC控制单元通过与制动系统、发动机控制系统协调动作,改变制动力矩和发动机输出功率,对汽车行驶速度进行控制,使主车在一定的限速范围内与前车始终保持安全行驶。如主车前方在安全时距范围内没有检测到车辆,则按照设定的车速巡航行驶。
1.1 系统硬件组成
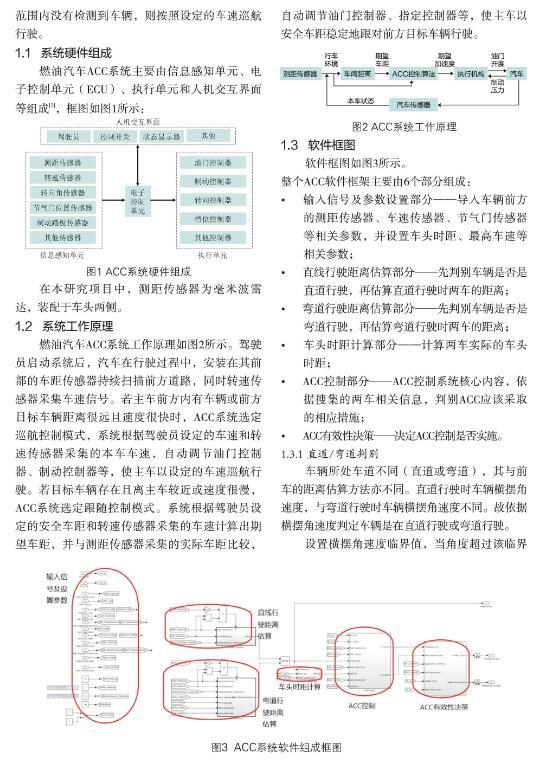
燃油汽车ACC系统主要由信息感知单元、电子控制单元(ECU)、执行单元和人机交互界面等组成[1],框图如图1所示:
在本研究项目中,测距传感器为毫米波雷达,装配于车头两侧。
1.2 系统工作原理
燃油汽车ACC系统工作原理如图2所示。驾驶员启动系统后,汽车在行驶过程中,安装在其前部的车距传感器持续扫描前方道路,同时转速传感器采集车速信号。若主车前方内有车辆或前方目标车辆距离很远且速度很快时,ACC系统选定巡航控制模式,系统根据驾驶员设定的车速和转速传感器采集的本车车速,自动调节油门控制器、制动控制器等,使主車以设定的车速巡航行驶。若目标车辆存在且离主车较近或速度很慢,ACC系统选定跟随控制模式。系统根据驾驶员设定的安全车距和转速传感器采集的车速计算出期望车距,并与测距传感器采集的实际车距比较,自动调节油门控制器、指定控制器等,使主车以安全车距稳定地跟对前方目标车辆行驶。
1.3 软件框图
软件框图如图3所示。
整个ACC软件框架主要由6个部分组成:
输入信号及参数设置部分——导入车辆前方的测距传感器、车速传感器、节气门传感器等相关参数,并设置车头时距、最高车速等相关参数;
直线行驶距离估算部分——先判别车辆是否是直道行驶,再估算直道行驶时两车的距离;
弯道行驶距离估算部分——先判别车辆是否是弯道行驶,再估算弯道行驶时两车的距离;
车头时距计算部分——计算两车实际的车头时距;
ACC控制部分——ACC控制系统核心内容,依据搜集的两车相关信息,判别ACC应该采取的相应措施;
ACC有效性决策——决定ACC控制是否实施。
1.3.1 直道/弯道判别
车辆所处车道不同(直道或弯道),其与前车的距离估算方法亦不同。直道行驶时车辆横摆角速度,与弯道行驶时车辆横摆角速度不同。故依据横摆角速度判定车辆是在直道行驶或弯道行驶。
设置横摆角速度临界值,当角度超过该临界值,则认为车辆在弯道行驶,否则为直道行驶[2]。
1.3.2 直道距离估算
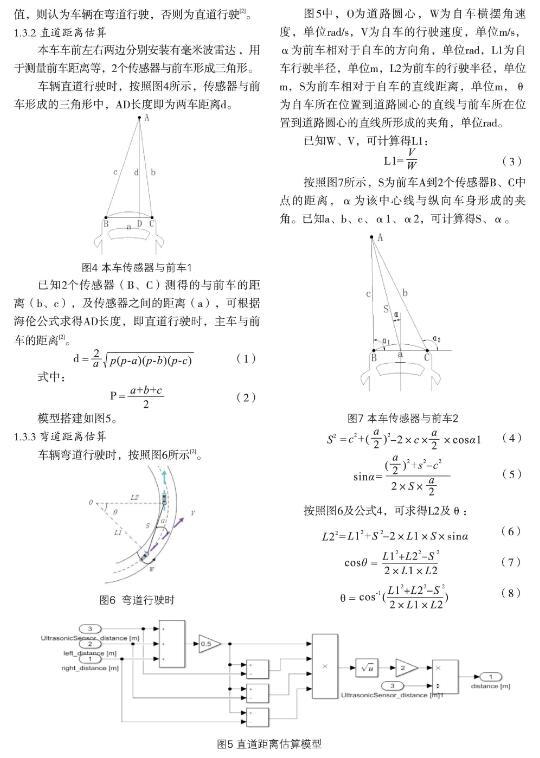
本车车前左右两边分别安装有毫米波雷达 ,用于测量前车距离等,2个传感器与前车形成三角形。
车辆直道行驶时,按照图4所示,传感器与前车形成的三角形中,AD长度即为两车距离d。
已知2个传感器(B、C)测得的与前车的距离(b、c),及传感器之间的距离(a),可根据海伦公式求得AD长度,即直道行驶时,主车与前车的距离[2]。
(1)
式中:
(2)
模型搭建如图5。
1.3.3 弯道距离估算
车辆弯道行驶时,按照图6所示[2]。
图5中,O为道路圆心,W为自车横摆角速度,单位rad/s,V为自车的行驶速度,单位m/s,α为前车相对于自车的方向角,单位rad,L1为自车行驶半径,单位m,L2为前车的行驶半径,单位m,S为前车相对于自车的直线距离,单位m,θ为自车所在位置到道路圆心的直线与前车所在位置到道路圆心的直线所形成的夹角,单位rad。
已知W、V,可计算得L1:
(3)
按照图7所示,S为前车A到2个传感器B、C中点的距离,α为该中心线与纵向车身形成的夹角。已知a、b、c、α1、α2,可计算得S、α。
(4)
(5)
按照图6及公式4,可求得L2及θ:
已知L1、θ,即可计算前车与本车的有效纵向距离d:
(9)
模型搭建如图8。
1.3.4 同车道判别
车辆开启ACC系统后,主车仅需针对同车道的前车状态采取不同措施,其余车道的车辆不影响。故需进行车辆同车道判别[2]。前车与本车的横向距离为D,当其值不超过特定数值D0时,即认为两车为同一车道。一般设定D0为单车道宽度减去本车车身宽度。
当车辆直道行驶时,按照图7所示,D可按照下式计算:
(10)
x为前车与左传的横向距离,y为前车与右传的横向距离。
当车辆弯道行驶时,按照图6所示,D可按照下式计算:
(11)
模型搭建如下:
1.3.5 实际的车头时距估算
车头时距HWT[5]是指同一车道行驶的车辆队列中两辆连续通过的车辆通过某一断面的时间间隔。
大多车辆采用可变车头时距策略,指的是ACC车辆与目标车辆设置的安全跟车距离dsafe随自车与目标车之间的相对速度vd而变化。计算如下:
(12)
HWTset为设置的车头时距,多取值1s~2.2s,d0为ACC车辆与目标前车的最小停车距离。
实际车头时距HWT按如下估算[3]:
(13)
d为ACC车辆与目标前车的实际距离,V为ACC车辆的车速。
模型搭建如下:
1.3.6 ACC系统控制模式
ACC系统开启后,主车依据前车车况可分情况进行控制[4],详见表1:
1)模型搭建如图11所示:
distance_difference為两车距离信号,其通过PID调节得到应有的加速应力,该值大于等于0,则其为ACC系统的加速应力(throttle[%]),否则为原车ECU规定的加速应力(th_in)。最小加速应力为原车ECU规定的应力。
加速应力通过调节PID参数更改,如图12:
2)模型搭建如图13所示:
模型3与模型1基本相同,区别在于最小加速应力为0。
3)模型搭建如图14所示:
本车需进行制动时,制动减加速度值与前车车速有关。LowSpeadActv为设置的前车截止车速,lead_velocity为实测的前车车速,两者比较,当前车车速值小于设置的截至车速时,减加速度值(brake[m/s2])由两车相对速度(velocity_ difference [m/s])及距离(distance_difference[m])计算得到(计算公式如下);否则减加速度值为0。
(14)
4)模型搭建如图15所示:
此状态,前车与本车的速度差相差较大,无需考虑前车速度,本车制动的减加速度值由两车相对速度及距离推算出。
5)模型搭建如图16所示:
6)模型搭建如图17所示:
1.3.7 ACC系统有效性决策
ACC有效性模型如图18。
当ACC设置开关关闭或本车车速大于最高允许运行速度时,ACC控制将失效,车辆按照原有行驶状态行驶,否则将按照ACC控制的行驶状态行驶。
2 自动驾驶软件仿真
自动驾驶软件仿真是通过模拟真实环境和构建汽车模型,找出自动驾驶过程中可能出现的问题。软件平台有很多种,一个完整的自动驾驶仿真平台,需要包括静态场景还原、动态案例仿真、传感器仿真、车辆动力学仿真、并行加速计算等功能,并能够较为容易的接入自动驾驶感知和决策控制系统;只有算法与仿真平台紧密结合,才能形成一个闭环,达到持续迭代和优化的状态。常用的自动驾驶仿真系统模块如图19所示:
本文使用PreScan软件进行仿真,PreScan是以物理模型为基础,支持多种传感器,基于simulink 开发的ADAS和自动驾驶仿真软件。其内置有多种环境模型、多种型号车辆动力学模型、多种型号传感器模型,能够轻松实现人-车-路闭环仿真。通过与Matlab联合仿真,用于验证本文中ACC控制算法。
3 PreScan仿真结果
采用PreScan软件对ACC模型进行仿真,针对4个场景进行仿真,前3个仿真为直道行驶时,不同本车、前车车速、不同车辆距离的情况下的仿真,可涵盖ACC控制的8种情况。仿真4为针对弯道行驶的仿真。
3.1 场景1:主、前车直道行驶,前车减速并停车
设置条件:前车初始车速50km/h,先匀速行驶,后减速直至停车。本车初始车速100km/h,与前车距离150m。
A本车仿真结果:先100km/h匀速行驶,后ACC控制减速至50km/h,匀速跟随前车。前车减速并停车时,CC控制减速直至停车。
3.2 场景2:主、前车直道行驶,前车先减速再加速
设置条件:前车初始车速50km/h,匀速行驶,减速直至10km/h,匀速行驶,加速至80km/h,匀速行驶。本车初始车速100km/h,与前车距离120m。
本车仿真结果:先匀速行驶,后ACC控制减速至前车车速,匀速跟随。前车加速后,ACC控制加速直至前车车速并跟随。
3.3 场景3:直道行驶,前车切出车道,邻道前车切入车道
设置条件:前车1车速50km/h,匀速行驶,切出车道;前车2车速60km/h,匀速行驶,切入车道。本车初始车速100km/h,与前车距离50m。
本车仿真结果:ACC控制本车减速至前车车速50km/h,匀速跟随,前车切出后,加速至设置车速100km/h。有前车切入车道且车速低于本车车速,ACC控制本车减速至前车车速60km/h并跟随。
3.4 場景4:弯道行驶,前车先减速再加速
设置条件:前车初始车速50km/h,匀速行驶,减速直至10km/h,匀速行驶,加速至80km/h,匀速行驶。本车初始车速100km/h,与前车距离100m。
本车仿真结果:先匀速行驶,后ACC控制减速至前车车速,匀速跟随。前车加速后,ACC控制加速直至前车车速并跟随。
4 结论
本车针对不同的前车和本车车况,ACC系统采取不同的控制策略,通过PreScan仿真,ACC系统基本实现相关功能,为驾驶员提供助力。
参考文献:
[1]崔胜民. 一本书读懂智能网联汽车[M]. 北京: 化学工业出版社,2019.
[2]白广路. 多模式切换的自适应巡航控制系统[D]. 合肥: 合肥工业大学,2018.
[3]赵力娜. 电动车自适应巡航控制方法研究[D]. 哈尔滨: 哈尔滨工业大学,2017.
[4]TASS International. PreScan help,2018.
[5]闫丹彤,何智成,陈东,谭纯. 电动汽车自适应巡航控制系统建模与仿真[J]. 计算机仿真,2016-1;171-176.
