三自由度并联机构设计及优化*
2021-09-26牟胜辉胡真清贺国建蒋修华何伟锋
牟胜辉,胡真清,贺国建,蒋修华,何伟锋
(1. 乔锋智能装备股份有限公司, 广东东莞 523000;2. 东莞理工学院机械工程学院, 广东东莞 523808)
0 引言
早在20 世纪中期,就有人开始研究多自由度并联机构。1931年崔宁[1]提出球面并联机构装置并用于娱乐方面;1940年刘家念[2]提出了一种可用在空间工业领域的并联机构,后用于汽车的自动化喷漆;1962年Gough 更是发明了一种六自由度检测装备并推广应用在飞行模拟器上。早期,多自由度并联运动系统多用于军事方面,包括空间对接、飞行模拟、潜艇测试等[3],例如国外某公司研制出了高分辨率视景系统、用于飞行模拟的显示系统以及生理体验模拟系统等[4]。后来随着工业自动化的发展,世界上越来越多的国家重视各种并联运动平台的研制,其应用领域在这个超精密技术日新月异的工业时代中被不断拓宽,目前已经成为了较为成熟的工业自动化技术,不仅在重型机械工业中有着广泛应用,而且在半导体、印刷电路板、太阳能电池的制造等较为前沿的领域也有着不可替代的地位。
多自由度运动平台的研究在我国起步较晚,主要原因是并联机器人技术在我国的应用推广十分缓慢,所以并联运动平台的相关理论仍需要继续提高;国内很多公司都有专门研发平面并联机构,如北京的星光凯明、上海的赢浩机电等[5]。尽管平面并联机构有着不可估量的应用前景,但加工精度的限制使其未能有突破性的发展;然而由于仿生学技术、智能控制技术、微型结构设计技术等方面的进步,未来必然会往智能化、标准化、微型化、人机一体化的方向发展。
1 三自由度并联机构设计与安装
1.1 机构设计
本文研究的平面并联机构主要是由3 条PPR(P 是移动副,R是转动副)驱动支链分别联接着一个动平台,3条驱动链是并联关系,通过3 条PPR 支链同时输入信号,让动平台进行平面运动;PPR支链中3个平面运动副共线,其中2个移动副、一个转动副,按移动副—移动副—转动副的顺序依次串联联接;图1~2为单个PPR铰链的原理和结构模型。

图1 单个铰链运动原理
为简化运动算法,减少奇异位形[6],便于控制并实现高精度定位,本文将PPR 支链简化,2 个移动副方向成90°连接,其中一移动副为主动副,与一定平台连接,其余2个运动副是被动副,转动副与一动平台连接;定平台与动平台之间通过3条构造相同的支链连接,在定平台上这3组驱动支链具体分布为:平行放置的2组X向PPR驱动链,对称分布在定平台上下两侧的居中位置,一组驱动链Y向放置在定平台左侧居中位置,即两X向的PPR 支链的主动副(即第一移动副)运动方向平行Y轴,Y向支链的主动副运动方向平行X轴;平台的整体结构如图3所示,跟动平台固接的是交叉滚子轴承,为了使PPR 铰链构造更紧凑,减少装配误差,采用单体二维运动的滚动导轨,将2个垂直的直线移动用一个部件实现,将十字滚动导轨与滚珠丝杆联接,然后用伺服电机驱动丝杆带动滑块,使PPR 铰链运动;通过分别控制电机输入,使动平台作各种平面运动;此外,平台还增加了一个冗余结构,即用一组没有输入的PPR 支链与Y向支链对称分布,作为第四只脚支撑平台[7],该设计不但没有产生运动干涉,反而增强了平台稳定性,使结构更加对称美观。
图2 单个铰链结构模型

图3 三自由度并联机构
1.2 定位平台安装
1.2.1 导轨安装
本次装配采用的是THK 的P 级精度(精密级)LM 导轨,这些导轨上都标有相同的制造编号,成对安装时,编号上标有 “KB” 的导轨是基准导轨,和基准导轨配套的LM 滑块设有按一定精度要求加工的基准面,可作为平台的定位基准;导轨的安装步骤如下:
(1)安装前须确保定平台安装面上无毛刺、打击伤痕及污物;
(2)用装配螺栓将基准侧导轨先不完全锁紧,然后以标准直尺为基准,从导轨的一头开始,用千分表一边调整基准导轨的侧面基准面的直线度,一边将装配螺栓完全锁紧;
(3)同样标准直尺为基准,千分表调整导轨从动侧直线度,从轴端依次固定装配螺栓。
1.2.2 滚珠丝杆安装
支撑单元的装配步骤如下:
(1)将丝杆轴插入到固定侧支撑单元(与U 形架一体化,挡油圈和角接触轴承等已经安装好);
(2)加入轴环定位轴承,并将锁紧螺母拧进去丝杆轴上加工有螺纹的部位,把该轴端固定;
(3)暂时将连接导轨副和丝杆的连接块拧紧在十字导轨的滑块座上;
(4)将连接块与丝杆螺母套上,并和丝杆轴装上,调整好丝杆轴部件与导轨副的偏置距离;
(5)在支撑侧利用卡簧和丝杆轴肩定位好球轴承,并将支撑侧支承座轻轻敲打使其套进轴承,再把两侧都不完全固定在底座上;
(6)用千分表检测丝杠轴端的跳动及轴向间隙的同时,依次将螺母和连接块、固定支承单元、支撑单元和底座分别完全拧紧。
1.2.3 伺服电机安装
先将联轴器装上丝杆固定侧端,再将电机安上,最后,将交叉滚柱轴承外圈用螺栓固定在动平台上,然后不完全锁紧位于4只“脚” 的衔接板(与十字导轨上面轨道固接)和轴承内圈,调整动平台使其尽量居中,完全锁紧轴承内圈装配螺栓。
2 三自由度并联机构机身结构件设计
为了使整个平台轻化,三自由度并联机构底座和动平台的材质均选用硬铝合金,型号为A2017,密度ρ=2790 kg/m3,表面用黑色氧化铝膜处理;底座的设计尺寸为:550 mm×550 mm×23 mm。考虑安装与维护的需要,底座和动平台都采用中空构造,做成环状方形,这样不仅更容易保证安装面的平面度,而且中部空间可用作光学装置等的使用场所,结构如图4所示。

图4 底座结构件
动 平 台 尺 寸 为430 mm × 430 mm × 23 mm, 质 量m=ρV= 12 kg ,为了方便维护和接线,动平台尺寸较定平台要小,四角的倒角较大,这样可以节省材料、减轻重量;另外,为了实现平台薄化,使动平台与交叉滚柱轴承连接部位更紧凑,顶板加工成嵌入式结构,结构如图5所示。

图5 动平台结构剖面图
连接丝杆螺母和十字LM导轨的板件:材质A2017,表面处理也是黑色氧化铝膜,外形尺寸根据丝杆和导轨副间的位置等确定,结构如图6所示。

图6 底座结构件
连接十字LM导轨与交叉滚柱轴承的板件:材质与表面处理同上,外形尺寸由轴承内圈尺寸和导轨长度等决定,结构如图7所示。

图7 动平台结构剖面图
3 三自由度并联机构的自由度分析与优化
3.1 机构自由度
为了解3PPR并联对位平台的运动特性,在此需要分析平台的自由度,并验证机构运动的确定性;如图8所示的平面3-PPR并联平台中,除去固定构件,则平台活动构件数n=2×4+1=9,平台中低副数目PL= 3 × 4 = 12 ,高副数目PH= 0 ,所以根据机械设计中平面机构自由度的计算公式[8],可得:

图8 自由度分析

由上面结构说明可知并联平台是由3 个电机驱动,原动输入数目等于机构自由度数目,故可证明平面3PPR并联平台的运动是确定的,可进行X方向、Y方向的平动和绕Z轴的平面曲线转动。
3.2 平台运动建模分析
平面3-PPR 并联运动平台能够进行平面直线运动和圆周曲线运动,自身还能转动一定的角度;如图9所示为平台运动的数学分析:根据设计确定,通过与各轴连接的交叉滚柱轴承中心的基准圆的半径R=150 mm,与X1轴连接的交叉滚柱轴承中心的角度位置θX1=90°,与X2轴连接的交叉滚柱轴承中心的角度位置θX2=270°,与Y轴连接的交叉滚柱轴承中心的角度位置θY=180°。

图9 运动平台的数学分析
下面分别对平台的3 种基本平面运动进行分析,了解丝杆螺母的进给情况[9]。
(1)当动平台往X方向平移x时,轴X1、轴X2同时驱动,轴Y停止,则X1轴、X2轴的螺母相对进给量δX1=δX2=x;
(2)当动平台往Y方向平移y时,轴X1、轴X2停止,轴Y驱动,则轴Y上螺母的相对进给量δY=y;
(3)当动平台作中心旋转运动时,转动角度为δθ,平台转动前的角度为θO,三轴同时驱动,则轴上螺母的相对进给量的计算如下:
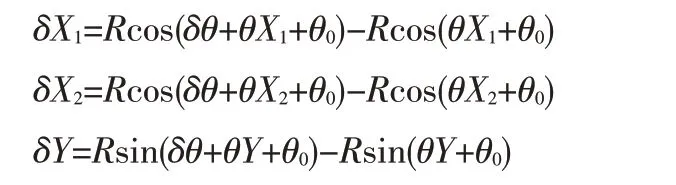

(4)当动平台作复合回转运动时,即同时自身转动和平动,三轴一起动作,相对进给量如下:由设计参数要求,知δθ=10°,θO=0°,以各轴行程的中心位置为原点,计算滚珠丝杆所需进给量为:

动平台X、Y向的平移量都是±20 mm,故丝杆至少需要的进 给 量 为20 × 2 + 26.05 × 2 = 92.1 mm ,方 便 计 算 和 余 量 需要,这里取丝杆的最大行程为100 mm。
3.3 机身结构件有限元分析
三自由度并联机构在设计过程中,已通过计算得知标准零部件在强度、刚性等方面均能满足定位平台的设计需要,在此对装置上较重要且可能强度不足的机身机构件进行有限元分析[10]。如图10 所示为动平台中零件固定和受力,输入载荷为200 N,材料为A2017;图11所示为网格分布,静应力主要分布在轴承安装处,图12所示为应力分布,零件应力最小的部位为0.000739437 MPa,最大的部位是0.217598 MPa,远远低于屈服强度317.104 MPa,因此零件强度满足要求。

图10 动平台固定与受力

图11 动平台网格分布

图12 动平台应力分布
图13所示为螺母驱动块,零件螺纹孔处固定,输入垂直载荷200 N,分析图14 所示的静应力分布,零件应力最小的部位是0.00789542 MPa,最大的部位是30.0909 MPa,低于屈服强度317.104 MPa,因此该零件满足强度要求。
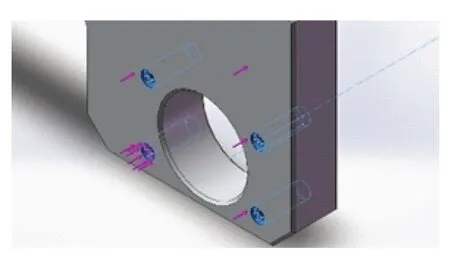
图13 驱动块固定

图14 驱动块受力
4 结束语
本文所设计的PPR 支链的机械结构,通过选用标准件和设计非标准件实现平面3-PPR 并联机构,并将其设计成并联运动平台,其中使用标准件实现PPR 支链机构,移动副选用THK的LM十字滚动导轨,其二维一体化的特点使支链结构更紧凑,也降低了安装难度;转动副则选用了交叉滚柱轴承,提高了安装精度,与动平台的连接采用了嵌入式,进一步使整个平台超薄化,最后加入冗余机构,使整个平台的运动更加平稳。此机构可以通过三个驱动的输入完成平面内的三轴运动,并能进行各种定位台动作,具有累积误差为0、刚性高、定位精度高、动作灵活、结构简单等优点,相对较低的制造成本更容易广受青睐。
