基于快速搜索随机树的薄片元件拾取机械手电控系统设计*
2021-09-26郑水林李守军王志铭
郑水林,李守军※,王志铭
(1. 宿迁学院机电工程学院, 江苏宿迁 223800;2. 中国矿业大学信息与控制工程学院, 江苏徐州 221116)
0 引言
以散列薄片状微型元件为基础的构件装配,受制于散列元件的拾取精度和拾取效率,难以匹配末端产品对基础构件的时效需求[1]。为解决这种困难,宿迁学院互联网+创新团队研制了基于振动送料盘的散列元件拾取装置,其震动能量驱动散列薄片元件沿螺旋轨道顺序排列并推挤前进,后经位于轨道末端的传感器感知并由PLC 启动机械手夹取微型薄片元件。其次,机械手路径规划是系统高效运转的必要条件[2-3],如何选择合适的方法确定机械手不同自由度下关节的运动轨迹,对于优化电控系统软件设计具有重要指导意义[4]。
本文将从协调送料取料动作次序,保障送件取件时空的有效配合,提高机械手对薄片状散列微型元件拾取的快速性和准确性等层面出发,研究路径规划实施思路、电控系统设计方案、机械手控制工艺及基于其的软件设计方法。
1 微型薄片元件拾取机电装置
拾取装置包括振动送料盘和五自由度机械手两个组成部分,如图1所示。振动送料盘装置是为提高薄片元件拾取效率所研发的关键设备。振动送料盘设计有螺旋形轨道,微型薄片元件在震动能量的驱动下沿轨道螺旋上升,散列元件在轨道中顺序排队并推挤前进直到轨道末端,然后振动盘停止振动,等待机械手取件。取件机械手部分包括金手指、手臂、手腕、X轴平移气缸、Y轴伸缩气缸、 摆臂气缸、直角坐标标尺和导向构件等。

图1 微型薄片元件拾取机电装置主体
上述两个组成部分通过光电开关接口进行信号耦合,即图中的对射式光电接近开关。当振动送料盘中的微型薄片元件到达取料位置时,接近开关的检测信号将启动机械手完成元件的拾取动作。
2 拾取系统电控系统设计
在对微型薄片元件机械手机电设备结构分析与控制工艺分析的基础上,研究电控系统的设计方法。将可靠高效作为设计总的指导原则,并将易于升级优化作为设计方向[5]。
微型薄片状元件机械手拾取系统的控制部基于PLC 实现。在进行电控系统设计时,以便于升级扩展为原则选择合适的元器件,搭建工业以太网总线网络,完成系统原理图设计,如图2所示。所用工具软件主要包括MicroWin Step7编程软件,MCGSE 嵌入式组态软件。主要硬件设备如下。
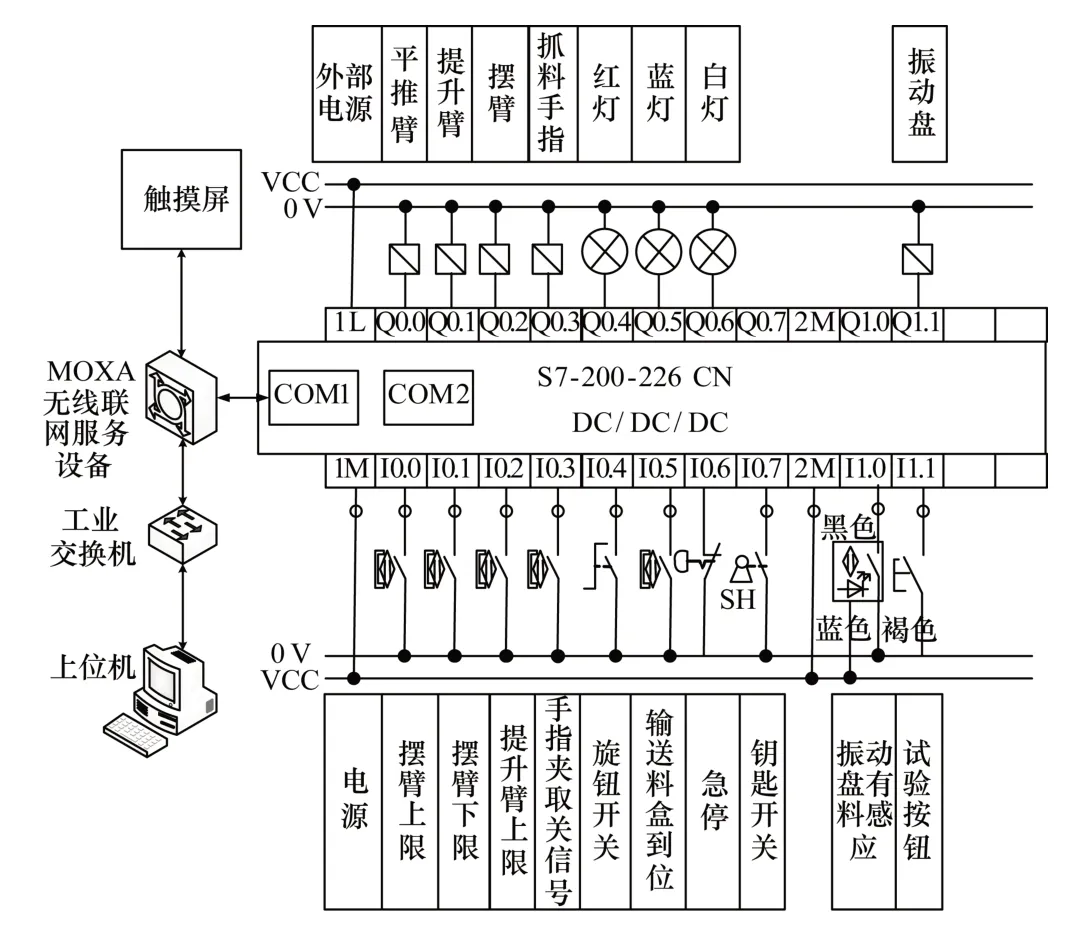
图2 拾取系统电控原理
(1)PLC:西门子S7-200 CPU226CN,24DI/16DO。
(2)触摸屏:深圳昆仑通态MCGS 6061Ti,24 V。
(3)RS-485 IEEE 802.11a/b/g/n 无线设备联网服务器:MOXA NPort IAW5000 A。
(4)正弦波矢量控制器:用于振动盘控制。
(5)欧姆龙继电器:用于控制电磁阀的通断电。
(6)振动盘控制器:振动幅度可调的全波/半波,220 V交流供电。
(7)2 位5 通电磁阀组:天启气动XINDE DC 24 V,用于控制机械手关节的伸缩、旋转动作。
(8)光电开关:欧姆龙对射式接近开关,检测距离可调(0~1.5 m)。
本设计主要包括以下3个特点。
(1)采用串口服务器实现跨协议组网。RS458 和工业以太网是两种不同的网络协议,通过MOXA NPort IAW5000A RS485 可以配置达6 个串口I/O 服务器,连接串口和以太网设备至IEEE 802.11 a/b/g/n网络。
(2)精简了机械手自由度数量。为提高机械手拾取效率,研究了基于RRT(Rapid Random Tree)避障算法的可视化分析与测量方法,通过减少无关气缸运动达到精简自由度的目的。下文将给出基于RRT算法的路径规划实现。
(3)方便与上下游设备通信连接。微型薄片元件机械手拾取装置是生产线的一个组成部分,为实现整个系统的信息共享,本文给出了以太网的组网方式,方便设备之间通信连接。
3 轨迹规划与软件设计
微型薄片状元件拾取机电装置具有多个自由度,其包含多个气缸,具有多种运动形态。虽然机械手拾件过程具有多种可能路径,但考虑到机械手的运动避障问题[6],本设计基于成熟的快速搜索随机树避障算法给出一种轨迹的逆向求解方法[7]。
3.1 基于RRT算法的机械手运动路径规划
在众多的路径规划算法中,快速搜索随机树(RRT)算法是一种较为高效的随机搜索算法[8],自从提出以来,深受广大科研人员的青睐。为描述RRT 算法避障算法,需要给出算法中用到的变量:SampleFree 表示互不干涉均匀分布的样本;ObstaleFree(xs,xe)用于判断起始位置xs和终点位置xe所生成的路径有没有实现避障,有则返返回1,否则返回0;Steer(xs,se)表示以一定步长从起始位置xs往终点位置xe方向搜索,搜索到新点xnew;Nearest(V,x)获得路径集合V中距离路径点x最近的一个点v。则基于随机树方法的机械手运动路径规划流程如图3所示。

图3 拾取系统电控原理
RRT算法中,路径点位置为:

式中:ρ1为随机点扩展的步长;ρ2为目标点扩展的步长。
采用RRT 避障算法,基 于 MATLAB Robotic Toolbox建立机械手运动学模型,将传送带作为障碍物,给定机械手起点和终点位置p0和pd,进行仿真得到图4 所示结果,给出多种可行的路径,从中选择路径最短的路径作为最优路径。

图4 拾取系统机械手避障路径
对于手臂5 个自由度的路径变化,得到不同避障情况下的路径点。其中,图5所示为机械手的大臂(提升臂)、小臂(摆臂)、手腕等3个关节在传送带障碍物下的运动路径图。通过理论分析与实际测量的路径几乎完全一致,说明采用RRT避障算法是可行的,在障碍物位置确定的情况下,可以取得较理想的规划效率,用以指导控制系统PLC软件设计。

图5 拾取系统机械手3关节位置
3.2 微型薄片状元件机械手拾取控制工艺
由第3.1 节中的机械手避障问题分析,可以通过合理的机械手的位置安装,精简掉部分自由度,使机械手通过尽可能少的关节动作完成元件的拾取过程,其控制工艺如图6 所示。
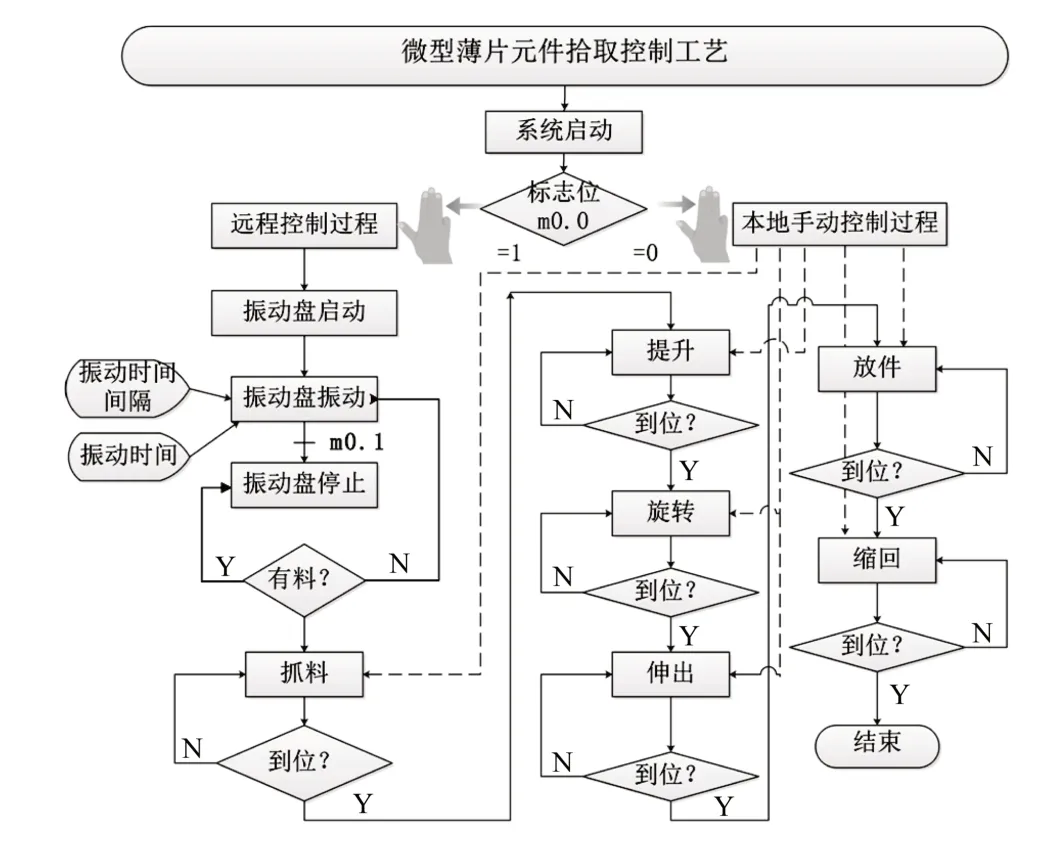
图6 拾取系统机械手3关节位置
(1)振动盘控制策略:根据过程控制的要求,设置振动时间(周期)、振动时间间隔;通过正弦波矢量控制器对振动盘施加激励信号;并根据螺旋轨道末端薄片状元件的有无来控制振动的启动或停止。
(2)远程过程控制:基于西门子PLC 电控制系统的远程自动化控制,根据机械手避障路径设计各个关节的运动序列:抓料、提升、旋转、伸出、放件、缩回等过程的自动化控制流程。
(3)本地手动控制:对各个动作分解操作,对振动盘的启动/停止、手抓的夹紧/松开、手臂的伸出/缩回、手臂的顺/逆时针旋转、金手指的松开/夹紧等动作进行独立控制。在系统调试过程中,本地手动控制是必不可少的,在检测每个自由度的可及范围方面也是必要的。
3.3 软件设计
3.3.1 I/O变量分配表
确定信号的I/O 地址,对I/O 端子进行地址分配是PLC 编程及监控软件设计的关键步骤。根据电控原理图列写I/O分配表,如表1所示。
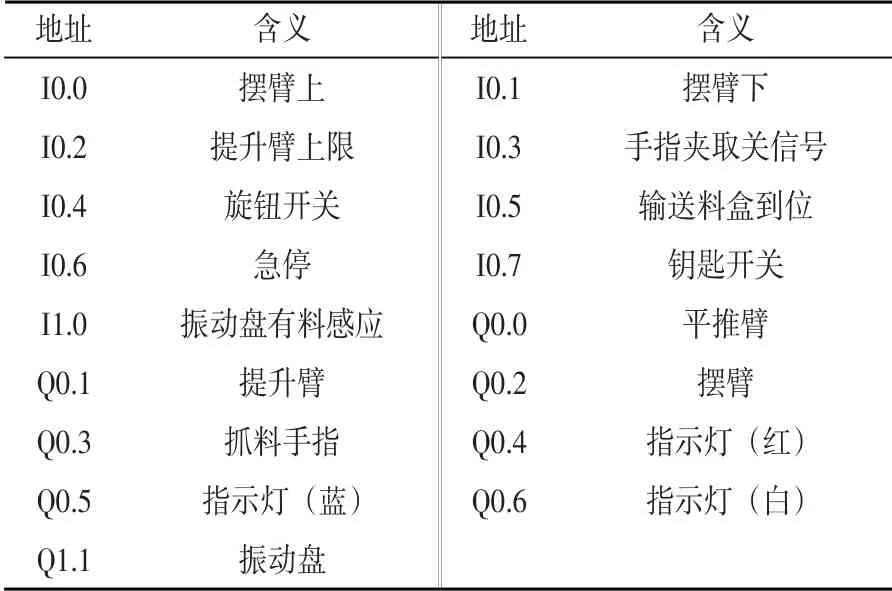
表1 设备与PLC之间的I/O分配表
3.3.2 MCGS触摸屏监控软件
触摸屏设备与PLC 通道连接是MCGS 组态软件配置的关键[9-10]。通过串口连接PLC 的COM1 与触摸屏的通信串口,最小采样周期100 ms,通讯等待时间500 ms。串口通讯波特率9600,数据位8,停止位1,偶校验。
在开发过程中,需要建立实时数据库,进行硬件设备组态与通道连接调试,包括通信调试和I/O 信号连接调试。然后,建立实时数据库与通道之间的读写关联,完成触摸屏与PLC之间的双向通信连接。开发的软件主界面如图7所示,包括元件计数、状态监控、参数设置、报警查询、手动/自动控制等主要功能。

图7 MCGS触摸屏监控软件
4 结束语
(1)综合了PLC、继电器、电磁阀等控制与执行元件实现对各机械手臂与振动给料盘的协调控制,并通过运动轨迹研究和路径优化方法实现了机械手的高效控制。
(2)给出了电控系统的硬件设计、轨迹规划、控制器选型及其端口定义。研究了基于RRT 避障算法的可视化分析方法,提出一种可行的路径规划实施方案。
(3)软件设计过程中充分考虑了精简自由度后的机械手拾取工艺,定义出PLC编程与监控软件设计所需要的I/O分配表,并通过嵌入式MCGS 组态软件完成了触摸屏监控软件的开发。
