面向重大自然灾害的救援装备研究现状及发展趋势
2021-09-26徐建华王军政赵江波李兰芸韩震峰李宏伟訾栓紧
张 新,徐建华,陈 彤,王军政,赵江波,仲 军,李兰芸,韩震峰,李宏伟,李 顺,赵 方,訾栓紧
(1.新兴际华科技发展有限公司高端装备研究院,北京 100070;2.新兴际华集团有限公司技术中心,北京 100070;3.北京理工大学自动化学院,北京 100081;4.河海大学机电工程学院,常州 213022;5.哈工大机器人(合肥)国际创新研究院无人装备研究所,合肥 230601; 6.北京北方车辆集团有限公司北京市特种车辆关键部件制备与评估工程技术研究中心,北京 100072;7.北京邮电大学软件学院,北京 100876;8.中国消防救援学院信息工程系,北京 102202)
地震、地质及洪涝等自然灾害多发频发造成的人员伤亡严重、经济损失巨大。据中国应急管理部统计,仅2019年自然灾害受灾达1.3亿人次,直接经济损失3 270.9亿元。为建立高效科学的自然灾害防治体系,国家先后实施了自然灾害防治技术装备现代化工程等系列措施,提高自然灾害预警与处置能力。救援装备作为救灾应急力量体系的重要组成部分,从快速抵达、救援处置、装备转场、协同救援及解决救援现场最后一公里的难题等方面对抢险救援至关重要。
在地震、泥石流、滑坡等重特大自然灾害引发的堰塞湖、建筑物和隧道坍塌等情况下,因现场地势复杂、气象恶劣、道路损毁以及各类次生灾害频发等复杂原因[1-2],导致大型装备无法抵达、现场环境难以勘测、救援人员生命安全受到严重威胁,目前在世界范围内,缺乏有效手段解决这些难题[3-4]。
受中国应急救援专业装备使用、仓储、调配等原因限制,目前大量投入地震救援战斗的还是较为常用的工程机械装备,如挖掘机、推土机、吊车、破碎锤等。这些装备因其通用性好、适用性强,能够大面积调配,常常成为地震救援中的主战装备[5],在生命线开辟、废墟搜救、堰塞湖处置等救援中发挥着重要作用。但是,现有救援装备功能单一、操控性能差等现场救援难题,同时面对重特大自然灾害时面临 “难抵达、难操控、难处置、难协同”的问题,造成救援效率难以提高、救援现场最后一公里难以到达的问题[6]。
近年来,国外在应急救援作业装备方面的研发逐渐呈现出小型化、多功能化和智能化的发展趋势[7]。小型化主要是为了应对日益严重的自然灾害,期望救援装备作业时能有更高的功率密度和更高的救援效率;多功能是期望派出的有限的救援装备能够尽可能多的执行各种救援任务;智能化则是希望救援装备能够替代人类,独自进入高危的自然灾害环境执行救援任务。上述应急救援装备的发展方向,主要涉及5个方面的研究领域:装备的无人化智能化领域、重载机械臂领域、复杂环境定位导航领域、协同控制领域、应急救援装备的模块化设计[8-9]。
现结合重特大自然灾害时各种地震、地质灾害抢险救援的需要,分析救援装备研究现状,同时结合装备技术的发展,探讨救援装备的发展趋势。
1 面向重大自然灾害的救援装备研究现状
1.1 国外研究现状
1.1.1 总体研究水平、最新进展和发展预期
面向重特大自然灾害的应急救援问题一直是世界各国关注的热点和难点。目前,中外主要聚焦于直接参与应急救援的作业装备,例如直接参与救援的挖掘类、装载类或搜救类装备[10]。
救援现场存在陡坡、坍塌和垂直障碍等复杂地形,这就要求机器人具备极强的高通过能力。高通过性行走技术一直是中外机动平台研究的核心方向之一,围绕如何进一步提升车辆的通过能力,研究过程主要经过了履带式推进、螺旋式推进、轮步式、履步式、步行方式等多样化的发展途径[11-12],其相应的技术成果也在各型无人平台上得到了充分的体现和进一步的发挥。
通常情况下,履带车辆的通过性优于轮式车辆,履带式行走系统是高机动平台一种重要的行走方案[13],如“黑骑士”(Black Knight)履带式无人平台、粗齿锯(Ripsaw)无人平台[14],如图1所示,平台重约12 t,采用了缩小式的“布雷德利”履带战车底盘,采用高强度铝材制成。扭杆式悬挂、液压差速转向、柴油机动力等较传统的技术保证整车具有较高可靠性,可通过加装模块化任务载荷而变型为突击、城市火力支援、扫雷、指挥通信等多型无人平台。
2009年6月,美国陆军武器装备与研发中心对“粗齿锯”履带式无人车进行了测试[15],如图2所示,该车可以达到97 km/h的行驶速度,爬上45°的山坡,克服1 m的垂直障碍和1.5 m的壕沟,动力方面加装了通用公司的Duramax V8柴油发动机,最大输出功率448 kW。吨功率接近于150 kW/t,远远高于主战坦克,堪称目前世界上机动性能最强的履带式车辆。

图1 “黑骑士”(Black Knight)履带式无人平台[14]Fig.1 Black Knight-typed unmanned platform[14]

图2 粗齿锯(Ripsaw)无人平台[15]Fig.2 Ripsaw-typed unmanned platform[15]
先进的无人平台还有以色列的“拿顺”无人战车、德国“歌利亚”无人战车、法国“INBOT”微型无人战车等,这些应用和发展比较好的无人平台的共同的技术特点包括:整车轻量化、模块化程度高;采用双效悬挂系统,地形适应能力强;弹簧活塞式履带张紧系统,有效避免脱带故障[16]。
此外,日本千叶工业大学研制的轮式底盘 Quince 机器人[17],也参与了福岛核泄漏救援工作,在应急救援实战中发挥了重要的作用。
在重型机械臂领域,国外侧重于运动学与动力学建模、智能控制与自主避障规划、结构有限元优化分析等方面,大量应用视觉识别与定位、遥操作力反馈等先进技术,并且加速与人工智能、新材料等相关前沿学科的融合。目前美国和日本居于领先地位。日本消防研究所[18]开发了履带式的双机械臂液压驱动机器人T-53,体积小,具有高机动灵活性,重量2.95 t,体积为2 320 mm×1 400 mm×2 800 mm,每只手臂长3 770 mm,单臂负载100 kg,可进行远距离操作。美国雷神公司开发了一种双液压机械臂救援机械臂,每个机械臂具有7个自由度,可实现在复杂环境中救援清障工作。
日本德姆萨克公司在2000年研发了水压驱动的救援机器人T-51,在T-51基础上,由日本消防研究所、京都大学、德姆萨克公司等研制了型号为T-52的援龙救援机器人。采用液压驱动,主从式进行运动控制,搭载双机械臂。在T-52援龙的基础之上,此团队又开发了履带式的双机械臂液压驱动机器人T-53[19],如图3所示,该装备体积小,高机动灵活,重量在2.95 t,可采用普通的轻型卡车运输;采用双臂设计思路,每只手臂长3 770 mm,具有7个自由度,实现灵活的运动,单臂负载能力为100 kg;搭载遥操作系统,操作者可进行远距离的遥控。

图3 日本援龙T-53救援机器人[19]Fig.3 T-53 Typed rescue robot of Japanese Dragon-aid[19]
2012年,美国雷神公司开发了一种双液压机械臂救援机械,每个机械臂具有7个自由度,通过具有临场力觉反馈功能的主从控制进行操作。通过双臂协作可以完成较多复杂动作,实现在复杂环境中救援清障工作[20]。瑞典BROKK公司研发了多种救援破拆机械臂,可用于抢险救援任务中的爆破拆除工作,如图4所示,其特点是结构设计紧凑,可以上下电梯等,使用液压驱动三自由度的机械臂开展救援任务,可以远程遥控并向基于主从控制的操控方向发展,经过多年发展,该公司己经形成了诸如“B60”“B120D”“B160”“B400”等系列化的产品[21]。
美国山猫公司的Bobcat 快换平台,可更换70多种作业工具,多次应用于地震、雪灾等突发事故的抢险救援。日立公司的ASTACO挖掘机采用主从控制,通过双4自由度控制杆自由直观地操作双工作臂进行协同作业,带有3D前台姿势演算,可以避免主副工作臂的接触碰撞[22]。芬兰LANNEN公司的8800i救援车具有3个工作臂,可搭配多种作业工具进行应急抢险救援工作。江苏八达重工研制的BDJY38SLL双臂救援机器人采用油、电双动力系统,双工作臂可切换切割、破碎、抓取和扩张等多种作业工具,并且可以协调工作。山河智能研制的高温加长臂机器人可快速切换挖掘、破碎、剪切、抓取等多种作业属具,完成高温环境下的抢险救援作业。

图4 瑞典BROKK公司的B60救援机器人[21]Fig.4 B60-typed rescue robot from Sweden BROKK Company[21]
在定位导航领域,在定位导航领域,国外研究起步相对较早,经历了单模单星座向多频多星座GNSS/惯导/视频等多源融合方向发展。国际卫星导航标杆企业瑞士U-blox研发了包括单模/多模、单频/多频卫星导航系列芯片及模组,在定位导航领域,马来西亚的SAUDI 等采用拉普拉斯方程来求解机器人路径规划算法中的势函数,并通过依次迭代的方法求解复杂方程的数值解[23];在开阔室外场景采用RTK技术可实现厘米级动态定位精度[24]。知名导航设备制造商加拿大诺瓦泰研发的全球导航卫星系统(global navigation satellite system,GNSS)/惯导(光纤陀螺)组合导航设备SPAN-CPT,在实时动态差分(real-time kinematic,RTK)技术失锁10 s的复杂环境仍能保持分米级定位性能。克罗地亚萨格勒布大学研发的视觉定位系统SOFT-SLAM可实现0.65%的定位精度。谷歌和特斯拉公司研发的无人驾驶汽车融合Lidar/红外/立体视觉/惯性/卫星导航等多源传感器,动态定位精度可达厘米级[25]。在应急通信领域,国外20世纪末便开始了对救援用移动式通信基站的研究,美国北得克萨斯大学在小型越野车上搭载了无人机通信系统,重建通信网络,无人机电池寿命长达8 h[26];整体来讲,国外室外定位导航技术经过长期发展,在技术成熟度、定位性能以及环境适应性方面均具有一定优势,基本上占据了定位导航技术的高端市场。
在协同控制领域,1987年1月在美国圣地亚哥召开了关于多机器人协同的研讨会,首次提出了多机器人协同研究的主要问题,截至目前国外在多机器人协同系统理论、实践等方面取得了很大进展[27],并建立了仿真和实验系统,美国堪萨斯州立大学多智能体和协作机器人实验室开发了融合人工智能、机器人技术、设计和软件工程方法和技术的自重构机器人系统SRRS,解决了多Agent系统机器人合作领域的问题。美日等国已经研制成功了力反馈控制算法的遥操作协同作业系统,且机械臂具有自主关节轨迹规划、避碰等功能。例如美国雷神公司研制的双液压机械臂救援机械臂具有临场力觉反馈主从控制功能,通过双臂协作可以完成较多复杂动作,可自主完成关节运动规划以实现复杂救援任务[28]。
无意识协作多机器人系统[29]包括无意识协作和有意识协作。主要仿生社会性生物群落(蚁群、蜂群等)的运行机制[30]。比较典型的系统包括:瑞士联邦理工学院的Alice[31]、日本名古屋大学的CEBOT[32]、美国MIT的SwarmBot集群分布式机器人系统[33]、美国Sandia国家实验室的 MARV[34]、美国南加州大学的SuperBot[35]以及德国斯图加特大学的进化多机器人有机体[36]等。
对于有意识协作多机器人系统,多机器人控制信息关系和控制关系的体系结构,以及问题求解能力的分布模式决定了系统的关键[37]。选择合适的体系结构,是多机器人系统高效运转的关键,也是构建多机器人系统的首要问题,如日本Asama等提出ACTRESS系统结构[38],美国学者Beni等研究的SWARM系统结构[39],LePape提出了GOFER结构[40],Parker等提出了ALLIANCE结构[41],Vidal等提出了一种混合层次体系结构[42]。
1.1.2 主要研究机构及其研究方法及成果
救援多装备远程协同操控目前存在以下难点:多装备救援时指挥无序、多装备间协同难以完成复杂任务、自主故障监测能力弱。总体上,目前救援装备向着信息化、智能化和无人化方向发展[43]。
美国宾夕法尼亚大学的研究者们开发了协同作战自动机器人系统,实现了机器人团队的互相合作,成功地在城市街道的环境中进行搜索定位、营救和军事任务,甚至在该系统中可以加入人类成员。国外从事救援机器人研究的主要机构如表1所示。

表1 国外从事救援机器人研究的主要机构Table 1 Research institutions engaged in research on rescue robots abroad
综上所述,国外的应急救援装备都在向提升作业规模、拓展一机多能以及智能化远程作业方向发展。
1.2 中国研究现状及趋势
1.2.1 总体研究水平、最新进展和发展预期
中国在应急救援装备领域起步较晚,研究的装备主要分为军事类、工程类和搜救类。新兴际华集团研制的智能化抢险破障车[49]具备智能化控制和信息传输功能,如图5所示,集成推土、夯实、吊装、剪切、挖掘破拆等功能,掘机配备工作装置快换接头,可遥控切换工作装置,该装备是一种有智能化控制和信息传输功能的多功能道路破障装备,可快速更换工作装置,通过高机动性和集成的各类救援功能,在道路被灾害损毁或非道路行进时,可以快速开辟通路,实现救援车队的紧急通行。也可以迅速到达灾害现场,进行救援作业。

图5 抢险破障车[49]Fig.5 Emergency vehicle[49]
中国在“十一五”期间已经将“废墟搜索与辅助救援机器人”项目列入国家863计划重点项目,由中科院沈阳自动化研究所机器人学国家重点实验室与中国地震应急搜救中心联合承担研制,并成功研制出“废墟可变形搜救机器人、机器人化生命探测仪、旋翼无人机”3款机器人[50],这3款机器人曾经被国家地震局评为“十一五”以来最具应用实效的10项科技成果之一。2013年4月20日,四川雅安地震发生后,沈阳自动化研究所科研人员迅速反应,于4月20日下午组成临时搜救队随同机器人急赴灾区开展救援工作。中国矿业大学研制了国内首台煤矿搜救机器人[51],河北唐山开城电控设备集团研制了中国首台矿井灾害空间环境探测机器人[52]。可以看到,无论工程类还是搜救类装备,都有向智能化和多功能方向发展的趋势。
中国兵器工业集团第201研究所在“十一五”期间研制了摇臂式悬架与电动轮的高通过行动系统[53],并进行了虚拟样机的仿真研究,如图6所示。“十二五”期间,针对地面无人平台发展的要求,研制了大行程调节与大扭矩驱动摇臂悬架,解决了大行程旋转、大扭矩驱动的技术难题。实现承重500 kg、180°旋转调节、最大驱动扭矩5 000 N·m的技术指标。北京理工大学、装甲兵工程学院、中国兵器工业集团第617厂、中国兵器装备集团第208研究所、中国兵器工业集团第201研究所等单位在“十二五”期间研制了多型轮式、履带式高机动无人平台[54],如图7和图8所示,其中,中国兵器工业集团第201研究所研制的6吨级轮式4×4无人平台、履带式无人平台均采用混合动力电驱动技术,最大行驶速度不小于60 km/h,纯电行驶里程不小于20 km,燃油行驶里程不小于200 km。轮式平台还采用了大功率、一体化的轮毂电驱动和可调油气悬挂技术,使轮式平台具备了原地转向、可调车姿的能力。
在重载机械臂领域,中国起步晚但发展迅速,侧重于运动学解算、运动轨迹跟踪控制策略、液压系统的高效合理设计、结构受力分析与参数优化等方面。例如,八达重工研制的双臂救援机器人具有两个机械臂,最大起重量可以达到20 t,并具有抓取、搬运等功能。鲁班机械科技有限公司研发一款轻量化多功能双臂救援机器人。

图6 轮步式高通过行走系统[53]Fig.6 Wheel walking high pass walking system[53]

图7 无人轮式平台样机[54]Fig.7 Unmanned platform prototype[54]

图8 履带式高机动无人平台[54]Fig.8 Wheeled and tracked high mobility unmanned platforms[54]
中国在应急救援装备领域的相关研究较少,目前正处于起步状态,形成的系列产品也较少。代表性产品为江苏八达重工机械有限公司(以下简称“八达重工”)研制的双动力双臂手大型救援机器人是国家“十二五”科技支撑计划项目重点攻关、研制的系列化产品[55],如图9所示,是一种具有油电“双动力”交换驱动、双臂双手协调作业,分别有轮胎式、履带式和轮履复合型底盘形式,以及可根据救援现场需要,快速更换不同作业功能液压属具的大型智能抢险救援装备,可以实现轮履互换,机动性强,跨越能力好。在2014年被鉴定为世界上吨位最大的救援机器人,具有两个机械臂,最大起重量可以达到20 t,并具有抓取、搬运等10余项抢险作业功能。经过近年发展,已经形成了小型(20 t)、中型(40 t)和大型(60 t)多种系列产品,参与了汶川地震抢险救援工作。
惊天智能装备股份有限公司在瑞典BROKK机器人的基础上,研发了多款工程机器人,如图10所示,具有破拆、挖掘等功能,可在部分抢险救援时发挥作用,其具有智能化的特点,实现对三自由度机械臂的自动化控制,实现定点抓取搬运等工作,并且可进行路径规划和环境感知等功能扩展。具有高适应性的特点,机身较为小巧,结构较为紧凑,适合于狭小空间内的作业。

图9 八达重工研制的双臂救援机器人[55]Fig.9 Double arm rescue robot developed by Jiangsu Bada Heavy-industry Group[55]

图10 惊天智能装备股份有限公司研制的工程机器人[56]Fig.10 Engineering robot developed by Jingtian Intelligent Company[56]
在定位导航领域,中国的相关技术研究起步较晚,但发展迅速且成果显著。武汉迈普时空导航科技有限公司研发的基于中精度惯性传感器/RTK的组合导航产品M39在复杂城区环境仍可实现亚米级定位性能。北京邮电大学提出的TC-OFDM定位体系,可实现室内外场景亚米级定位[57]。中科院计算技术研究所研发的基于深度学习的场景自适应组合导航算法,使用低成本MEMS传感器/RTK组合平台,在复杂城区环境可实现亚米级可靠定位[58]。百度公司研发的无人驾驶汽车集成Lidar/vSLAM/GNSS等多源定位模块,可实现复杂城区环境下的厘米级导航,能自主完成8字交叉跑等类似复杂运动模式[59]。中国矿业大学与无锡市永神利煤矿安全设备厂共同研发了一种可用于矿难现场的移动式小型通信基站,主要利用蓄能动力移动技术、井下环境通信技术和密闭空间呼吸环境保障技术等技术手段[60];武汉大学也对救援用小型通信基站进行了研究。不过,从整体来讲,国内在室外多源融合定位导航技术研究领域已取得部分国际一流科研成果,但是在复杂场景以及更高精度定位导航技术研发方面仍然有待进一步突破。
在协同控制领域,对于确定系统和各机器人之间的信息流通关系及其逻辑上的拓扑结构,决定了任务分解和角色分配、规划及执行等操作的运行机制,提供了机器人活动和交互的框架,国内面向救援救灾应用的双臂机器人协同控制系统的研究相对较弱,王醒策等[61]针对多机器人编队提出了分层的体系结构,陈卫东等[62]采用递阶混合式结构进行多机器人编队和收集垃圾,而崔益安等[63]则尝试建立一个通用与开放的、适应于非结构环境的自组织分层式结构SCLA。
而在实际应用中,协同操控系统则应用较少,实施效果也比较差,八达重工研制的双动力双臂大型救援装备、鲁班机械科技有限公司的轻量化多功能双臂救援机器人,二者均是人工操控机械臂各个关节进行协同作业,不具备自主协同作业功能。
综上所述,国内的应急救援装备有了长足的发展,主要向功能拓展、机械系统控制以及定位等技术方向发展。
1.2.2 主要研究机构及其研究方法及成果
中国从事相关研究的主要机构及其代表性成果如表2所示,项目研发相关的主要代表性文献、专利、标准如表3所示。
1.3 中外对比分析
在多功能救援平台领域,以美日俄为代表的装备平台具有整车轻量化、模块化程度高;采用双效悬挂系统,地形适应能力强;弹簧活塞式履带张紧系统,有效避免脱带故障等先进特点,适应了救援现场的需要,对救援起到了有效的提升作用,中国则主要基于装甲车底盘、推土机底盘等底盘平台,轻量化作用不明显、模块化程度较低,在适应地形方面有着难以克服的缺陷,在救援时跨越障碍也存在一定的限制性作用[78]。
在重载机械臂领域,美日等国家重视动力学建模和以动力学为基础的轨迹规划与智能控制算法的研究,并且在自主轨迹规划和多臂协同作业等方面投入巨大,重视与视觉、遥操作和人工智能等先进技术的融合。中国目前侧重于重载机械臂的机构设计,在动力学建模理论方面研究较少,在控制方法上多以传统的比例-积分-微分(proportion integration differentiation,PID)为主,对多臂协同作业、视觉、遥操作等方面的研究也不足。国外在臂杆-液压系统相耦合的动力学建模,以及基于动力学的高精度补偿跟踪智能控制算法和多臂协同作业上取得较大进展,并且在视觉识别与定位、遥操作、人工智能等相关前沿技术的融合上成果丰硕,而中国在这些方面差距较大,尤其体现在动力学建模、多臂协同和遥操作等方面[79-80]。

表2 中国从事救援机器人研究的主要机构Table 2 Research institutions engaged in rescue robot research in China
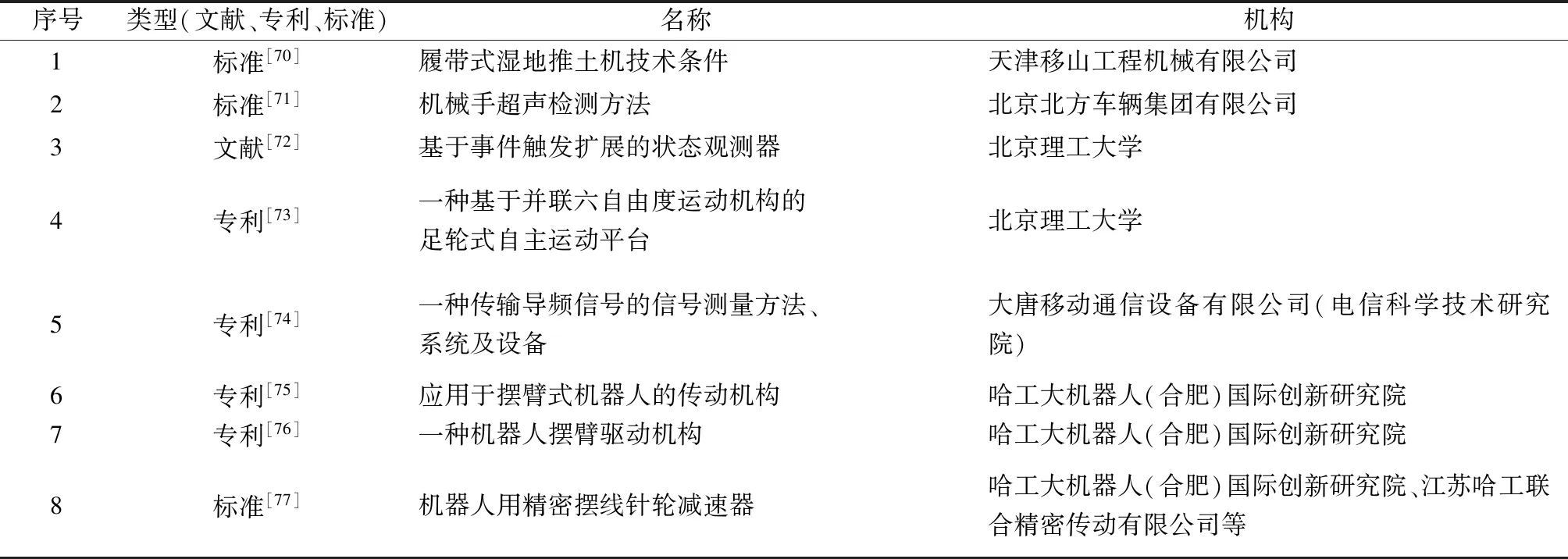
表3 救援机器人相关的主要文献、专利、标准Table 3 Documents,patents and standards related to rescue robot
在定位导航领域,国外研究起步相对较早,经历了单模单星座向多频多星座GNSS/惯导/视频等多源融合方向发展。国际卫星导航标杆企业瑞士U-blox研发了包括单模/多模、单频/多频卫星导航系列芯片及模组,在开阔室外场景采用RTK技术可实现厘米级动态定位精度。知名导航设备制造商加拿大诺瓦泰研发的GNSS/惯导组合导航设备SPAN-CPT,在RTK失锁10 s的复杂环境仍能保持分米级定位性能。克罗地亚萨格勒布大学研发的视觉定位系统SOFT-SLAM可实现0.65%的定位精度。谷歌和特斯拉公司研发的无人驾驶汽车融合Lidar/红外/立体视觉/惯性/卫星导航等多源传感器,动态定位精度可达厘米级。整体来讲,国外室外定位导航技术经过长期发展,在技术成熟度、定位性能以及环境适应性方面均具有一定优势,基本上占据了定位导航技术的高端市场。在定位导航领域,中国的相关技术研究起步较晚,但发展迅速且成果显著。杨艳娟等[81]研究了基于卡尔曼滤波算法的惯性导航系统/全球定位系统(inertial navigation system/global positioning system,INS/GPS)组合导航系统,并将该组合技术应用于某飞行器,验证表明角度信息作为观测量对参数的估计精度和速度计算有很大改善。张新等[82]发明了一种履带式底盘机器人侦察智能化自主导航方法,该导航方法通过多次视频图像机器学习提前构建学习模式下的基础地图,并与当前区域地图融合构建巡检区域全局3D地图,以此确定巡检任务点及巡检任务,能够提高识别准确率,从而提高导航准确性。高为广等[83]改进了定位导航融合算法,利用预报残差构造的最优自适应因子设计GPS/INS组合导航自适应滤波器,并针对反向传播(back propagation,BP)神经网络存在的训练速度慢、容易陷入局部极小等问题,给出网络的改进算法,该算法明显提高了网络收敛速度,并在精度和可靠性方面有了明显提高。因此,从总体上讲,中国的定位导航技术已经有了长足的进度,但是由于定位导航系统的相对固定,对组合定位导航形式上的创新存在一定局限性,针对于复杂应用环境下的定位导航算法、技术及产品仍需要进一步研发和突破,以实现无通讯环境下的精确定位导航。
在协同控制领域,国外采取运动学和动力学结合的方式,用蒙特卡洛法分析多机械臂工作空间,建立多臂运动约束关系和多臂闭链运动学方程,以椭球包围盒法构建多臂各连杆碰撞模型,实现避障运动轨迹规划、协同作业。国内的救援机器人多臂协作方面研究虽然较多,但是应用效果较差[84-85]。
总之,中国在救援装备的理论基础、集成系统技术、稳定性及操控系统等方面有了很大的进步,但与国外还存在一定的差距,这是中国救援装备发展的方向和动力,以全力促进中国应急救援处置能力的提升。
2 现有救援装备面临挑战问题
在应急救援装备及其智能化领域,中国一直是依靠工程机械装备进行开展,难以较大幅度地提升中国救援的处置水平,同时在救援实战化水平方面也存在较大的空缺和短板,在应急救援越来越重视的今天,智能化应急救援装备亟待研制和工程化,同时针对应急救援装备的验证示范体系和标准化体系也尚未形成,为了弥补这一系列欠缺,现有应急装备研究项目多以应急救援机器人科学问题探知为基础,研制系列化、实战化的救援机器人,解决地震、地质等重特大自然灾害面临的救援工程机械“难抵达、难操控、难处置、难协同”的难题,从救援机器人高通过性、智能人机交互操控、多工况智能适应、快速组网及自适应定位、多装备协同控制以及示范应用等多个方面开展探讨和研究,以提升中国应急救援的处置水平,面临的技术挑战主要包括以下方面。
(1)多功能救援平台技术。基于救援机器人平台的水陆快速机动、大跨度越障、高可靠工作等指标要求,构建轻量化及高可靠性机器人平台,实现机器人平台执行机构先进驱动与控制,实现救援现场的自适应协同及高机动越障抗冲击,实现混合动力能源的高效管理。
(2)重载机械臂技术。基于复杂救援环境的不确定因素,构建多自由度机械臂本体和敏感负载液压系统;研究多源异构信息精准感知系统构建与机械臂自适应控制技术,构建基于双曲正切函数的积分滑模变结构控制策略,实现强干扰环境下的高精度轨迹跟踪;实现临场感知力反馈遥操作主从控制;实现高效精准多臂复合运动控制与协同作业。
(3)定位导航技术。针对灾害场景下通信基站和CORS站受损,对无线信道环境进行精准建模,为定位导航、通信控制关键技术研究提供理论依据;实现大带宽高速率视频信息采集和低时延高可靠主从控制;研究基于差分地基增强及深度扩展卡尔曼滤波的多源组合导航技术,提高导航定位系统坚韧性;研究面向重大自然灾害环境的LiDAR/5G/视觉/IMU融合SLAM定位技术,提高救援机器人位置估计精度和鲁棒性。
(4)协同控制技术。基于救援灾害场景的需求分析,开展地震、地质等灾害场景的救援情景构建,开发标准化的试验验证技术;研究多机高效协同调度指挥策略,开发多机远程智能协同调度及控制系统;研究救援机器人单机与多机协同的可靠性、机动性、平稳性、操作性等标准化试验验证和关键性能的示范与评估,成标准化的机器人试验验证体系。
3 面向重大自然灾害救援装备的研究方向及趋势
当前,随着社会的发展和科技的进步,各类先进技术不断出现,应急救援装备必将得到进一步发展和完善,并朝着多样化、多功能化、信息化、智能化的方向发展。特别是国家应急管理部的成立,必将在救援体系、能力与装备发展过程中发挥引领作用,推进中国应急救援装备成体系快速发展,从而全面提升中国的灾害管理与救灾能力[86]。
在地震、泥石流、山体滑坡等重大自然灾害发生后,面临着难处置、难侦测、难抵达、难保障、难协同问题,以服务极限环境处置需求,兼顾先进、实用、协同与安全为指导思想,按关键技术研究—多装备平台研发—协同控制系统研发—标准研究与示范推广技术路线的多功能救援机器人成为救援装备发展的新方向,重点聚集于救援机器人的高通过性、智能人机交互操控、多工况智能适应、快速组网及自适应定位、多装备协同控制以及示范应用等多个研究方向和发展趋势。
针对重大地震灾害、重大地质灾害后,大型设备运输受限、难以第一时间抵达现场,同时现有救援装备功能单一、需要多台装备协同救援作业等关键需求,需突破救援机器人结构设计、系统控制、定位与信息传输、系统与装备匹配集成、灾难环境示范性评价与检验检测等方面的理论、方法、技术、装备和标准,构建系列化多品种的小型多功能高机动重大自然灾害救援机器人装备,形成应急救援合力,提升救援综合服务能力。
从重大自然灾害现场救援需求对地面无人平台的应用要求来看,地面无人平台未来发展趋势是智能化、通用化和一体化。智能化要求地面无人平台具有更高的智能水平,除了智能分析外,还具备战略智能,逐步减少人在救援环节中所占的比重,甚至完全取代人完成救援任务,如图11所示。通用化要求地面无人平台能够搭配足够多的任务载荷以适应多种救援现场的需要。一体化指地面无人平台向多台协作、多系统协作的方向发展,既能独立执行任务,又能协同进行作战,同时还要保证有足够的自主能力、足够的可靠性和足够的抗毁性。
救援机器人装备融合了非稳态灾害环境下的机器人稳定控制理论、机械臂刚-柔耦合与多臂协同完备动力学理论、多源自适应融合导航机理及异构导航传感器观测不确定性探知、复杂信道环境随机网络拓扑以及异质脆弱链路场景下高可靠通信问题四项科学问题,仍需开展深入探知和研究,同时攻克救援机器人整体动力学与运动学设计、分析与优化;复杂救援任务下的机器人智能化远程人机交互技术;强非线性多作业系统大负载液压机械臂高精度快速响应技术;复杂救援环境约束下的多臂协同技术;救援机器人平台轻量化和高可靠性设计及关键部件成形技术;多地形轮足式机器人行动系统协同柔顺控制技术;基于多天线及上行免调度的超远距离、大带宽、低时延主从通信控制技术;多层次自适应智能融合定位及多源异构导航传感器误差建模及补偿技术;重大自然灾害环境下救援机器人多机协同技术和救援机器人标准化试验验证技术及指标体系构建等先进关键技术,揭示救援装备体系构成的关键要素,研制覆盖应急救援、移动侦测及快速运输等功能,实现了救灾机器人“功能-构型-结构-适用”的创新需求,形成多品种系列化救援机器人,建立灾后快速救援装备体系,解决救灾现场机器人运行受限严重、负载能力不足及实现复杂环境高精度可信定位和高速率实时通信问题。形成智能无人综合应急救援保障工作体系及方法,提升复杂多变的自然灾害环境下应急救援装备救援能力、智能能力与协同能力,保障救援工作的及时性、安全性与科学性,全面提升中国重大自然灾害的应急救援处置能力。

图11 小型履带式救援机器人系统[87]Fig.11 Small crawler rescue robot system[87]
通过科学问题的探知和关键技术的研究,揭示救援装备体系构成的关键要素,研制小型多功能高机动高可靠救援机器人,包括系列化履带与轮足式灾后救援平台、多功能多自由度协同救援机械臂系统、快速通信组网及定位精确感知系统、高效协同作业的远程操控系统,共同构建智能无人综合应急救援装备体系,实现救灾机器人从功能创新、结构创新到适应性广泛的系列需求,通过履带式、步足式等多种类型救援机器人的研发和应用,解决救援机器人在现场救援难以转换救援场地、难以便捷作业、难以实时通信、难以协同作业的“四难”救援问题,提升应急救援装备的现场处置能力,降低救援人员的伤亡率,保障人民财产和生命安全,保障救援工作的时效性、安全性与科学性。
4 救援机器人发展展望
针对自然灾害现场危险、环境复杂,大型救援装备无法抵达、现有侦检手段失效、救援人员生命受到威胁等应急救援难题,救援机器人具有较好的发展趋势,具有以下发展趋势。
(1)高机动救援机器人系统研究。面向不同结构类型的救援机器人,进行小型化、多功能、高机动、高可靠的整体结构设计与优化研究、模块化设计与人机协同组装匹配技术研究、复杂救援任务下的智能化远程人机交互技术研究、复杂环境下的机器人稳定运动控制研究。完成救援机器人的结构优化和模块化快速组装设计,实现机器人系统的可靠人机交互和稳定控制。
(2)高负载机械臂结构设计、多臂复合运动技术研究。研制具有吊装、抓取、剪切、破碎、移除、高空作业等功能的救援机器人装备,采用复杂机械系统动力学建模、强非线性系统自适应控制、远程力反馈和多臂闭链等理论,突破机械臂灵巧构型设计与优化、双曲正切函数积分滑模变结构控制、主从式力/位多臂协同运动、临场感知力反馈遥操作控制和抓取、剪切、破碎、移除作业属具等关键技术,研制重载液压机械臂和多臂协同遥操作作业系统;研制液压属具通用接口,开发两自由度液压手腕、夹具和抓斗,通过快速更换液压手腕及夹具实现多功能作业,实现抓取、剪切、破碎、移除等作业功能,研制吊装、高空作业装备。
(3)基于轻量化技术的小型多功能高机动救援机器人系统研究。进行高承载救援机器人平台轻量化及高可靠性系统设计、灾后复杂环境下救援机器人平台执行机构先进驱动与控制技术研究、机器人平台救援现场的自适应及高机动越障抗冲击技术研究、混合动力能源的高效管理技术研究。
(4)基于多传感器信息融合、室外定位等关键技术的定位系统研究以及基于主从控制、5G通信等关键技术的控制通信系统研究。研究多层次自适应多源异构导航传感器误差建模及补偿技术、空地一体化协同组网理论,通过基于深度时空网络在线学习的多源自适应融合高精度连续可靠导航定位技术、基于多源传感器信息融合的室外定位系统、基于5G和微波通信技术的主从控制通信系统研究,实现复杂灾害环境下高精度连续可靠定位和5G实时可靠传输。
(5)救援机器人装备标准化试验验证技术指标体系及其应用示范研究。开展小型多功能高机动救援机器人总成技术研究、基于重大自然灾害情景构建的多功能高机动救援机器人验证环境及指标体系构建研究、救援机器人标准化试验验证技术研究和重大自然灾害环境下救援机器人多机协同技术的关键技术验证、示范与评估技术研究。
5 结论
(1)论述了中外在多功能装备、重型机械臂、定位导航和协同控制领域的多方面的研究进展,中国在救援装备的理论基础、集成系统技术、稳定性及操控系统等方面有了很大的进步,但与国外还存在一定的差距,这是中国救援装备发展的方向和动力,以全力促进中国应急救援处置能力的提升。
(2)在应急救援装备及其智能化领域,应重点从救援机器人高通过性、智能人机交互操控、多工况智能适应、快速组网及自适应定位、多装备协同控制以及示范应用多个方面开展研究,提升中国应急救援的处置水平。
(3)具有高通过性、智能人机交互操控、多工况智能适应、快速组网及自适应定位、多装备协同控制的多功能高机动机器人成为救援装备发展的新方向,并预期成为救援装备的主力军,提高中国救援的处置能力。
