楼梯扶手清扫机器人的动力特性研究
2021-09-25李剑英陈子华李墁强陈瑞欣谭新海张锐博
李剑英, 陈子华, 李墁强, 陈瑞欣, 谭新海, 张锐博
(肇庆学院机械与汽车工程学院,广东肇庆 526061)
0 引言
国内外学者对清扫机器人进行了大量研究,也有了广泛的市场应用。贺廉云[1-2]提出利用平行四边形形变特点实现上下楼清扫功能的机器人;张嘉伟[3]提出了一种新型清洁机器人结构的整体设计方案及硬件设计思路,该清洁机器人适用于商业场所,且对所设计的机构进行了分析;周冬冬等[4]基于蚁群算法并结合家庭清扫机器人所遇障碍物,通过环境建模实现清扫机器人的路径规划;鲁重钢等[5]基于STM对智能清扫机器人进行开发。楼梯清扫机器人能否稳定平顺地爬行是研究关注点。Yuan[6]和Liu等[7]各自设计了一种轮脚混合式爬楼机器人,其轮子与脚部的上下组合伸缩实现平稳上下楼;Takahisa Kakudou等[8]研究了一种平移方式爬升方法,通过传感器识别楼梯;姜雪梅[9]设计了一种采用双臂协调运动控制方法,实现自动下楼的机器人,用于楼梯、楼道自动清洁,该机器人用丝杠实现升降;姚兴田等[10]设计了一种基于单片机的楼道清洁机器人控制系统,该系统可实现楼道清洁机器人的智能路径识别、避障、上下楼及清扫功能;王雪飞[11]基于STM设计了楼道清洁机器人控制系统;张磊等[12]设计了使机器人与梯面保持平行的运动方式,防止机器人在踏步上移动时的跌落与碰撞,针对机器人在踏步难转身的问题,介绍了变半径转身及边前后挪动边转身的新方法;张磊还先后设计了平动旋转腿式楼梯清洁机器人[13-14]和升降伸缩式楼梯清洁机器人[15]。王福鑫等[16]设计了一款智能楼道清扫机,其行星轮爬升装置带着整个清扫机爬升,清扫装置可以实现横向清扫。
国内外学者对清洁机器人和楼道清扫机器人进行了大量研究,但对楼梯扶手清扫机器人的关注暂未见文献报道,本文拟建立楼梯扶手清扫机器人的数字化模型,在此基础上采用ADAMS软件分析其攀爬齿轮传动机构和夹紧固定机构的动力特性。最后,比较仿真分析结果与理论设计,本文研究结果可为楼梯扶手清扫机器人的设计提供理论依据。
1 楼梯扶手清扫机器人的结构及基本原理
楼梯扶手清扫机器人结构组成如图1所示,本文主要针对楼梯扶手清扫机器人的攀爬机构和夹紧固定机构的动力特性开展研究。攀爬机构为驱动齿轮啮合传递动力的机构,夹紧固定机构为主驱动齿轮和对称式齿轮及连杆组成的机构。攀爬机构布置在机器人底部,并用电动机驱动齿轮传递动力,进而驱动机器人攀爬;夹紧固定机构布置在机器人尾部,使机器人能固定在楼梯扶手上,并与攀爬机构共同作用,安全稳定地在扶手上爬行。

图1 楼梯扶手清扫机器人结构
2攀爬机构动力特性分析
利用三维建模软件对楼梯扶手清扫机器人攀爬机构进行数字化建模,该模型为一对相互啮合的齿轮副,如图2所示。齿轮副的基本参数如表1所示,齿轮材料选用45钢。
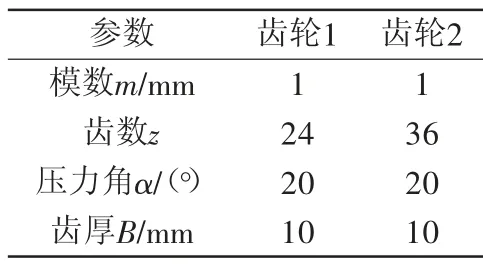
表1 齿轮副的基本参数
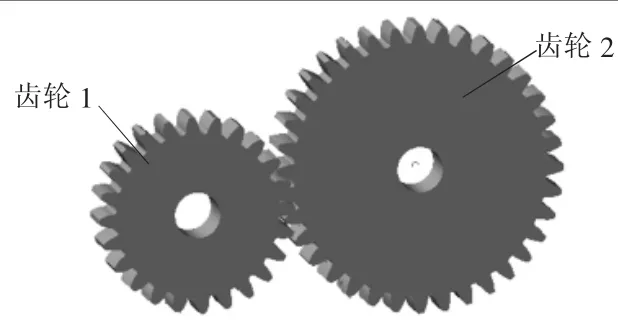
图2 攀爬齿轮传动机构
将攀爬机构的齿轮副数字化模型导入ADAMS软件中进行动力特性分析,并施加接触和驱动力,在齿轮2上添加转速为72°/s的驱动,结果如图3所示。

图3 齿轮副角速度曲线
从图3可知,攀爬机构的齿轮副转速为107.6 °/s,与理论计算值108.0 °/s基本接近。
楼梯扶手清扫机器人攀爬驱动选用的是直流减速强力电动机,齿轮1采用固定副,输入6860 N·mm的转矩添加在齿轮2上,结果如图4所示。

图4 齿轮副啮合处受力曲线
从图4可知,满载时输出稳定,输出转矩大小为7130 N·mm,啮合处受力为405 N,齿轮啮合处受力在起动时瞬间增加,但没有明显的碰撞和波动,说明楼梯扶手清扫机器人可以平缓稳定地攀爬在楼梯扶手上,且进行下一步的清洁。
3 夹紧固定机构动力特性分析
利用三维建模软件对楼梯扶手清扫机器人的夹紧固定机构进行数字化建模,夹紧固定机构由主驱动齿轮、对称式齿轮、连接杆和圆柱销组成(如图5)。将夹紧固定机构的数字化模型导入ADAMS软件中进行动力特性分析,部件采用转动约束、固定约束和点接触,以及在圆柱销接触处添加动摩擦力,本文选用的摩擦因数为0.1,并在主驱动齿轮上添加36 °/s的转速。

图5 夹紧固定机构数字化模型
3.1 连接杆1的动力特性分析
添加转速为36 °/s在主驱动齿轮上,对连接杆1的加速度、角速度和角加速度进行分析,结果如图6所示。

图6 连接杆1的加速度、角速度和角加速度曲线
从图6可知,在0~0.01 s内连接杆1的角加速度有瞬时变化,从0增大至3.0×10-4°/s2后又减小,分析发现,短时间内有微小振动的主要原因是电动机带动齿轮的瞬间有一定冲击,但瞬间的不稳定不会对整个运动过程产生影响,在0.01 s后连接杆1的角加速度稳定地接近于0,说明清扫机器人能很好地在扶手上夹紧;连接杆1的加速度仿真结果为5.15 mm/s2,与理论计算值5.00 mm/s2基本保持一致,说明连杆1受力稳定,几乎没有振动和晃动;连接杆1的角速度仿真结果为48 °/s,与理论计算值48 °/s结果保持一致。
3.2 连接杆2的动力特性分析
添加转速为36 °/s在主驱动齿轮上,对连接杆2的加速度、角速度和角加速度进行分析,结果如图7和图8所示。
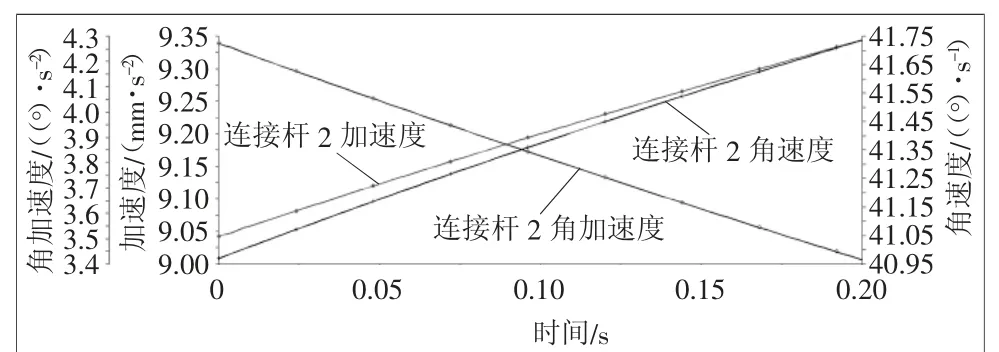
图7 连接杆2的加速度、角速度和角加速度曲线

图8 连接杆2的角速度和角动量曲线
从图7可知,连接杆2的加速度和角速度均增加,但增幅均较小,分析发现,主要原因是右臂带动连接杆2运动,传递给连接杆2的力逐渐增加,但增幅较小。角加速度逐渐减小从而使角速度增加缓慢,运动平稳,夹紧过程平顺,其主要原因是圆柱销内部润滑剂与摩擦力缓冲了起动过程的冲击与振动。对比各曲线的变化可知,连接杆2的加速度、角速度和角加速度变化值均较小,说明夹紧固定机构的转速和受力较稳定。
从图8可知,通过分析连接杆2的角动量发现,其仿真值和理论计算值几乎保持一致,如选取0.1 s处的数值计算得转动惯量为1.22×10-5kg·mm2,与理论计算值1.20×10-5kg·mm2几乎一致,且连接杆2在连接杆1稳定的状态下被驱动时角速度和角动量的变化范围都很小。
3.3 圆柱销1的动力特性分析
添加转速为36°/s在主驱动齿轮上,对圆柱销1的单位转矩、平移速度和平移加速度进行分析,结果如图9所示。
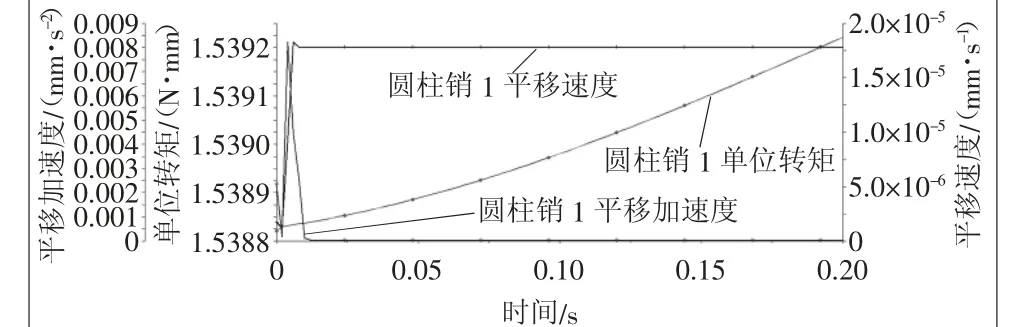
图9 圆柱销1的单位转矩、平移速度和平移加速度曲线
从图9可知,圆柱销1的单位转矩在1.5388 ~1.5392 N·mm小范围内增加,且增速较慢,其平均值为1.5390 N·mm,与理论计算值1.5400 N·mm相差不大,通过分析圆柱销1的平移速度和平移加速度可知,圆柱销1的平移速度较慢且稳定,稳定时平移加速度为0,说明运动过程摩擦力缓冲了冲击与振动。圆柱销1在0~0.01 s内平移加速度变化的主要原因是起动过程的微小冲击与振动。
3.4 圆柱销2的动力特性分析
添加转速为36 °/s在主驱动齿轮上,对圆柱销2的单位转矩、平移速度和平移加速度进行分析,结果如图10所示。
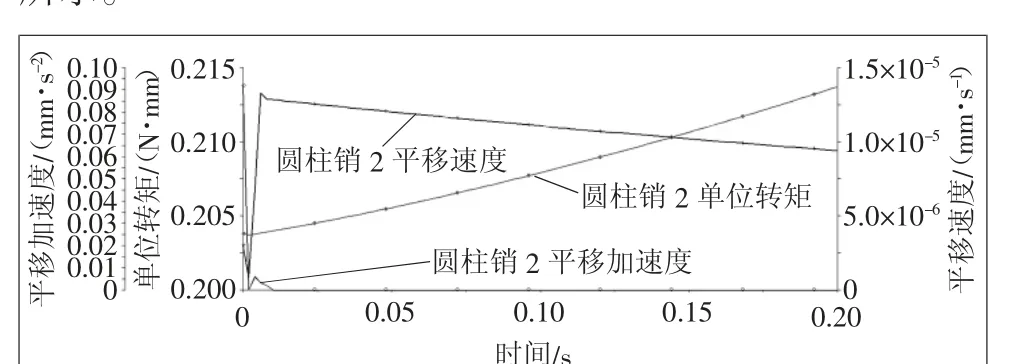
图10 圆柱销2的单位转矩、平移速度和平移加速度曲线
从图10可知,相较圆柱销1,圆柱销2的单位转矩要小得多,在0.204~0.214 N·mm范围内增加,且增速也较慢,其平均值为0.209 N·mm,约为圆柱销1单位转矩的1/7。通过分析平移速度和平移加速度可知,圆柱销2的平移速度减小较慢且稳定,稳定时平移加速度为0,说明运动过程摩擦力缓冲了冲击与振动。进一步分析可知,圆柱销2在运动过程冲击载荷和单位转矩都较小,运动较为平稳。
4 结语
在建立楼梯扶手清扫机器人数字化模型基础上,通过ADAMS对其攀爬齿轮传动机构的动力特性进行分析,分析结果表明:齿轮驱动传动时受力较为平稳,楼梯扶手清扫机器人的攀爬过程较稳定,几乎没有振动;对夹紧固定机构的连接杆和圆柱销的动力特性进行分析,研究表明,机器人在攀爬和固定时,夹紧固定机构的传动和受力较平稳,且不会在启动时产生较大冲击,具有良好的稳定性,本文研究结果可为楼梯扶手清扫机器人的设计提供理论依据。
