一种基于拟Newton法的多非合作外辐射源的无源融合定位算法
2021-09-25石玉璞
石玉璞,袁 键,蔡 伟
(中国电子科技集团公司第五十一研究所,上海 201802)
0 引 言
无源定位系统本身不发射电磁波,而是通过侦收电磁波信号对目标进行侦察,相对于有源定位系统,具有隐蔽性好、作用距离远等优点,最近十几年发展较快。无源定位方法作为无源定位系统的重要组成部分,也有着不错的发展[1]。
非合作定位系统是无源定位系统的重要组成部分,非合作定位系统的基本思想是以侦收到的己方、敌方、中立民用或军用辐射源发射的直达波信号为参考,合并侦收到的该辐射源发射的信号经被探测目标反射后的回波信号,对直达波和回波信号进行分析,从而实现对目标的定位和跟踪[2]。
随着无源定位技术的发展,不同定位体制的无源定位设备越来越多,无源定位设备组网的趋势越来越强烈,不管是无源设备组网还是具有不同定位体制的单个无源设备或者过量的定位参数的输入,都需要定位参数信息的数据融合手段[3-4]。
本文在文献[5]的基础上提出了一种多非合作辐射源的定位融合算法模型,并利用最优化理论中的拟Newton法对该模型进行求解和仿真验证。经过程序仿真验证,该算法在目标匀速直线或者匀速曲线飞行、时差均方根误差和测向均方根误差一定的情形下,收敛速度快,定位精度高,为多辐射源的非合作系统提供了一种融合算法支撑。根据文献[5]和本文的分析,未来该算法模型思想可以尝试应用于各种定位参数(不仅仅局限于时差、测向)场景中,为多定位参数的融合提供了一种思路。
1 多非合作辐射源的融合定位算法
1.1 传统单非合作辐射源的定位
如图1所示,传统单非合作辐射源定位原理为:在以侦察站为切点的局部切面坐标系(NED)下,T为目标,M为侦察站,其坐标在圆心,S为辐射源。令目标T到侦察站M的距离为dMT,目标T到辐射源S的距离为dST,辐射源到目标T的距离为dMS,τ为辐射源S发射电磁波经目标T反射被侦察站M接收到的时间(回波时间)和侦察站M直接接收到辐射源S发射电磁波的时间(直达波时间)的差,c为光速,θ为辐射源S到侦察站M的连线和目标T到侦察站M连线的夹角,则定位公式为:
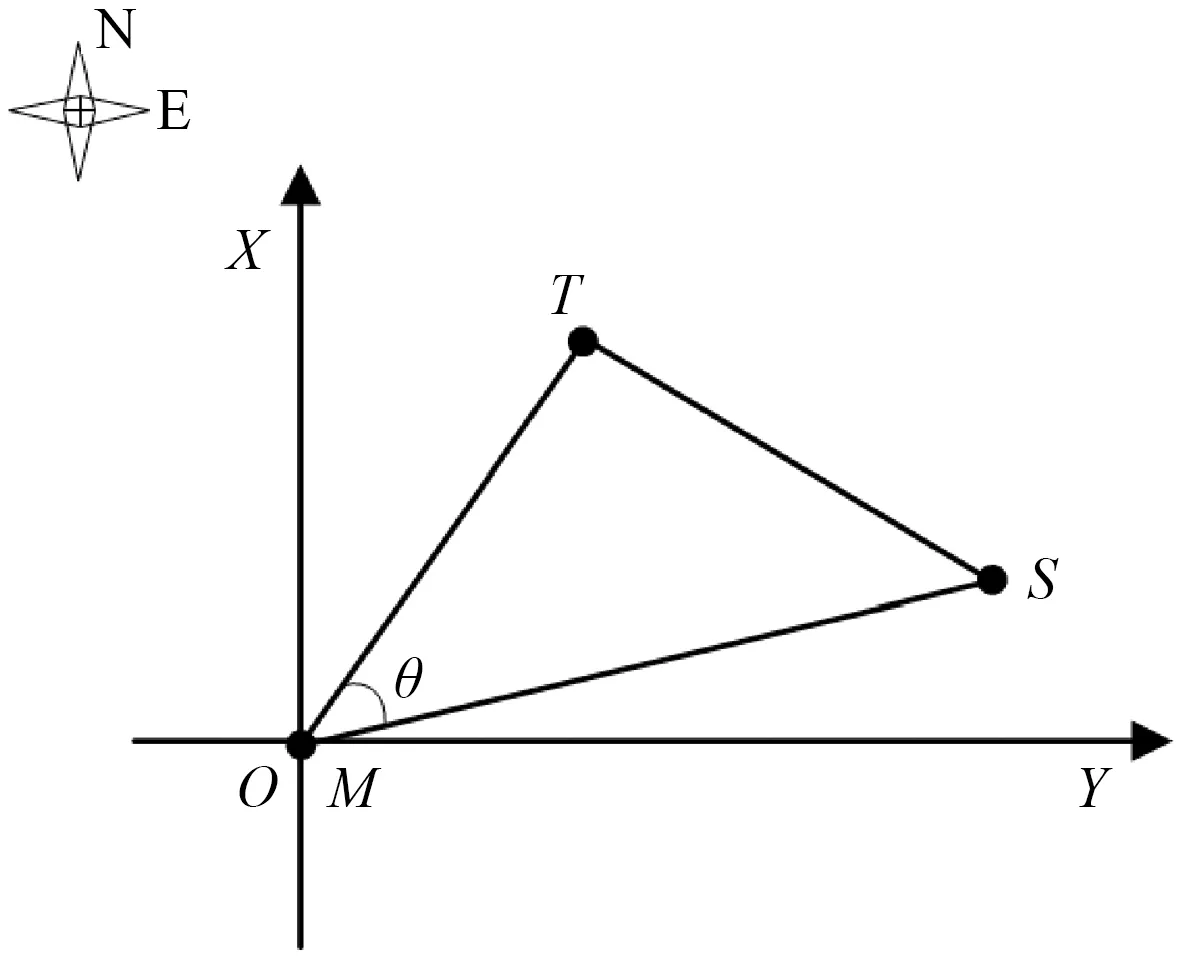
图1 非合作定位示意图
(1)
可以求得:
(2)
式中:c,τ,dMS都是已知量;θ可以由辐射源S相对于侦察站M真北角θMS和目标T相对于侦察站M的真北角θMT求出,即θ=θMS-θMT,也为已知量。
因此根据式(2)求出侦察站和目标的距离dMT后,再根据θMT可以求出目标T的在NED下二维坐标(不考虑高度)x=(xx,xy),再根据NED坐标系和大地坐标系的转换关系,可以求出目标T的大地经纬度。
1.2 多非合作辐射源的融合定位模型
如图2所示,存在多个非合作辐射源的情形下,假定目标在做匀速直线运动,目标T的初始位置为l0=(xx0,xy0),速度为v=(vx,vy),运动tn时间后,当前位置Tn为ln=(xxn,xyn)=(xx0+tnvx,xy0+tnvy),相对于主站M的真北角为θn。假设有k个辐射源,则第1个辐射源S1的位置为s1=(sx1,sy1);第i个辐射源Si的位置为si=(sxi,syi);第k个辐射源Sk的位置为sk=(sxk,syk)。目标在Tn位置时分别在辐射源S1、Si和Sk下的回波和直达波的时差为τn1、τni和τnk,光速为c,则根据非合作原理可以得到:

图2 多非合作辐射源的融合定位示意图
(3)
式中:l0和v是未知量,其他均为已知量。
求解上述非线性方程组可以得到l0和v的值,并根据tn计算出ln的值,但是上面方程组在某一时刻,方程个数不一定,可能未知数个数比方程多,也可能比方程少,不太容易求解。
根据上述方程组,可以把它转化为最优化问题如下:
令距离差为:
(4)
角度差为:
(5)
则可以得到如下无约束最优化问题:
(6)
式中:x=(xx0,xy0,vx,vy)。
由于角度存在2kπ的关系,对式(5)两边取正弦可得:
(7)
则式(6)可转化为:
(8)

(9)

1.3 带时间窗的多非合作辐射源的定位模型
当目标处于匀速直线运动或者近似匀速直线运动时,1.2的模型是可行的。但是当目标处于匀速圆周或者曲线运动时,上述模型需要进行稍微修改。即按照时间Δt滑窗取数据(如图3所示),在比较小的区间中,一般目标运动状态可以近似为匀速直线运动。模型形式仍为式(9),只是式(9)中只用Δt时间段的数据,而不是整个tn时间段的数据。
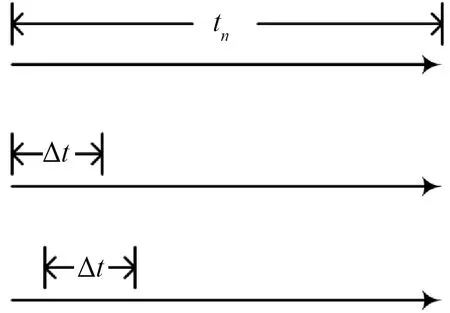
图3 多辐射源非合作定位示意图
2 模型解法
根据文献[6]可知,式(9)为无约束最优化模型,无约束最优化的解法可以分为解析法和直接法,解析法使用导数,直接法不使用导数。这里虽然目标函数式(9)形式复杂,但是仍连续可导,因此我们选择解析法。为了避免求目标函数的二阶偏导数矩阵(Hesse矩阵)影响实时性,选取解析法中的拟Newton法进行模型求解。
具体算法流程如下:
(a) 判断当前批号信号是否有拟Newton法的初始点;
(b) 若无初始点,则收集至少2个时刻测量值,并利用传统方法(2)计算出x=(x0x,x0y,vx,vy),作为拟Newton法的初始点,否则继续;
(c) 判断该批信号的最新数据和最早数据时间差是否超过规定时间段Δt,若超过,则删除超过的数据,删除超过Δt的数据后,若该批信号有过最优解,则把最优解作为拟Newton法的初始点,否则转向(b)重新计算拟Newton法的初始点;
(d) 取适当ε和迭代最大次数N,利用拟Newton法中的BFGS算法计算出优化点x=(x0x,x0y,vx,vy),并按照信号批号存储该优化点。其中BFGS算法每步迭代中步长的算法为不精确一维搜索法[6]。
(e) 根据当前时间差Δt,计算出当前位置ln=(xxn,xyn)。
3 仿真验证
3.1 目标匀速直线运动仿真
仿真场景如图4所示,其中主站(侦察站)为固定站,非合作辐射源0和非合作辐射源1为固定站,非合作辐射源2为运动的辐射源,以500 m/s的速度做圆周运动。未知目标0为待测目标,以500 m/s的速度做匀速直线运动,每隔5 s 1个定位点,一共144个定位点,运动轨迹如图中点迹1。

图4 匀速直线运动仿真场景
时差均方根στ为200 ns,测向均方根σθ为1°。在目标飞行过程中,非合作辐射源0、非合作辐射源1、非合作辐射源2分别用式(2)定位的点迹,如图5、图6、图7所示。融合算法Δt取值为1 min,定位点迹如图8所示。
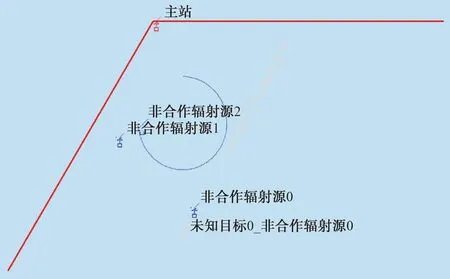
图5 非合作辐射源0定位点迹
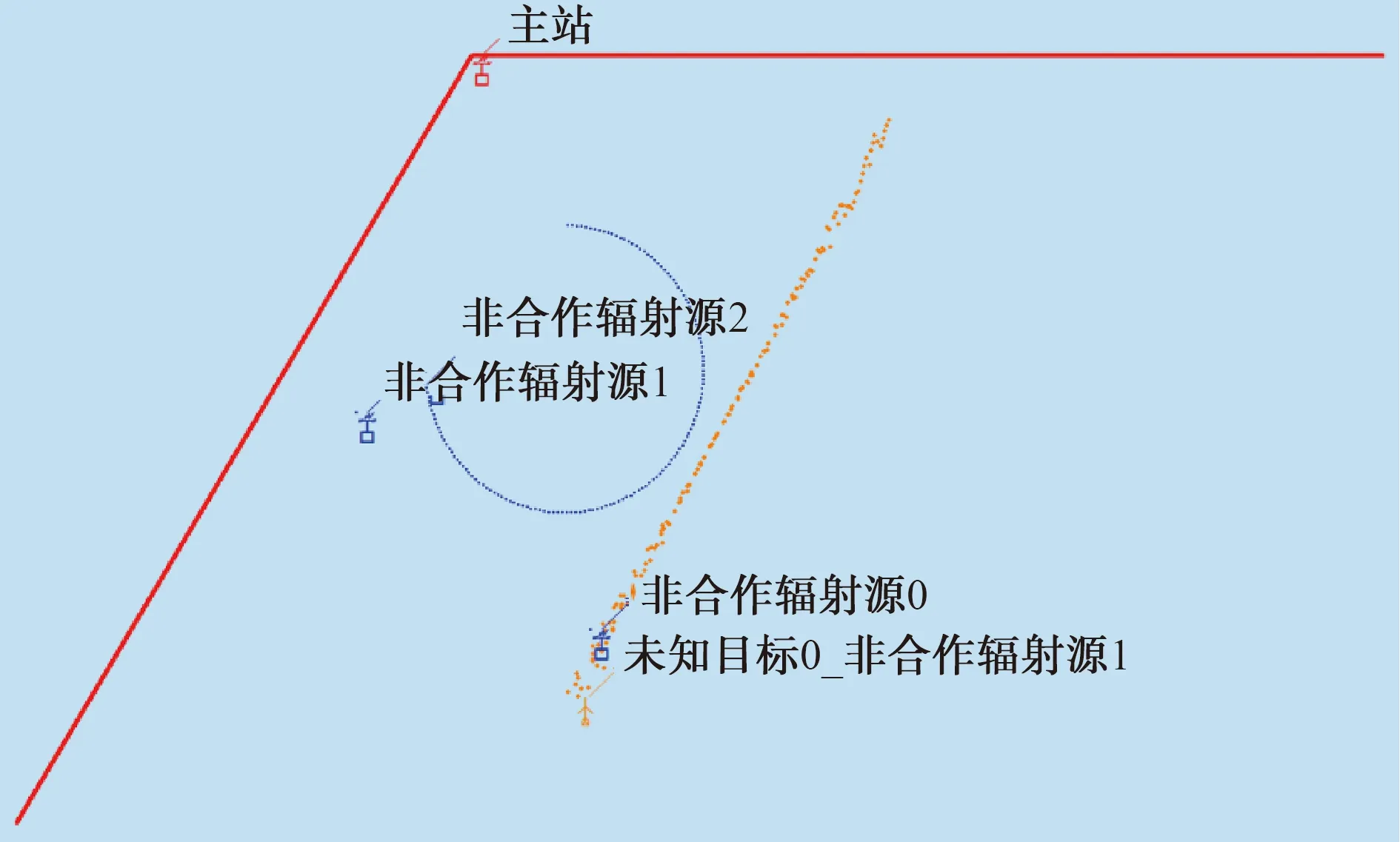
图6 非合作辐射源1定位点迹

图7 非合作辐射源2定位点迹
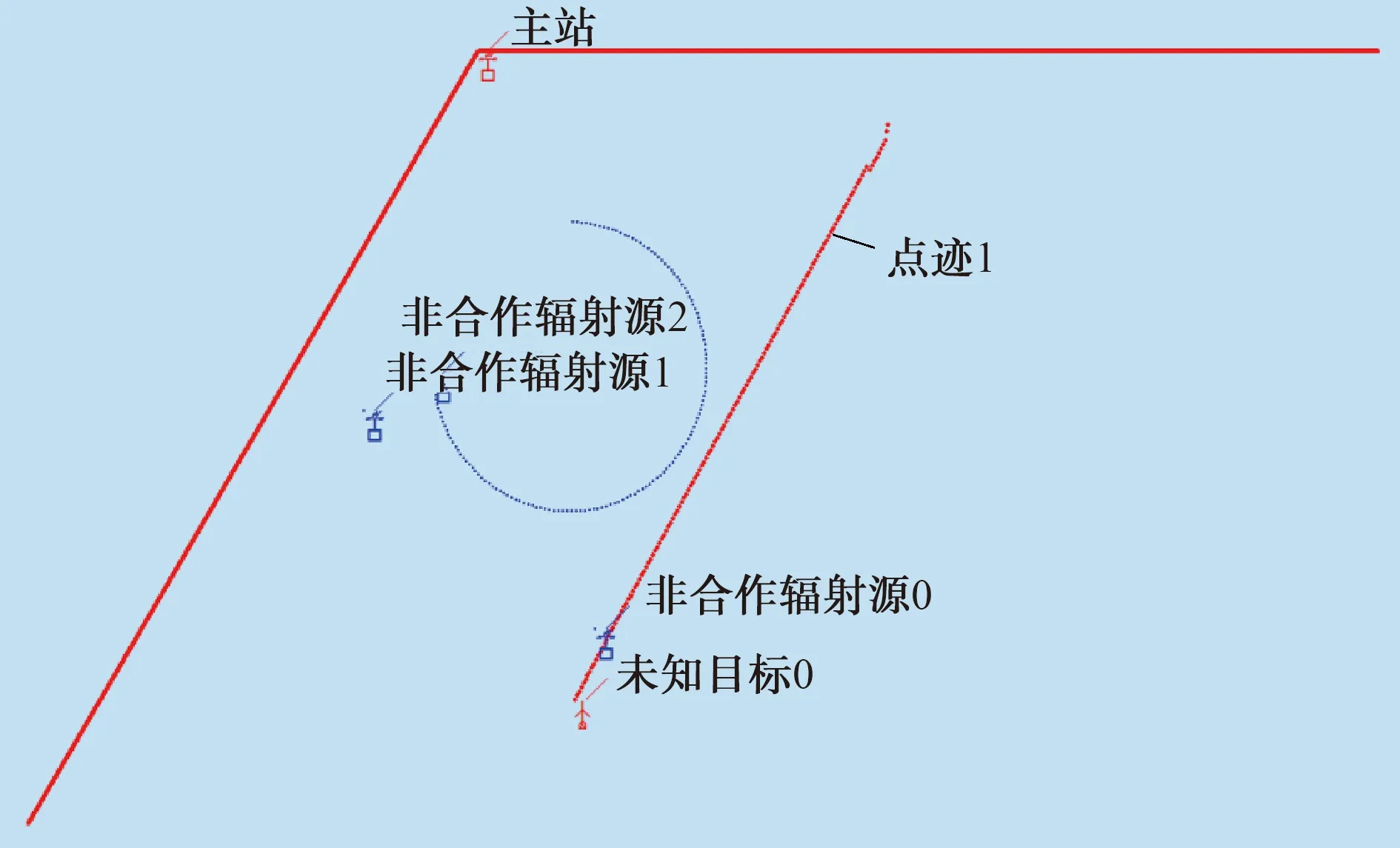
图8 非合作融合定位点迹
由图4到图8的仿真结果对比可以看出,融合定位算法产生的点迹(图8点迹1)明显比传统算法的点迹更平滑,和真实点迹(图4中点迹1)贴合程度更高,并且连续性更好。
传统算法和融合算法的圆概率误差(CEP)对比如表1所示。

表1 传统算法和融合算法对比
由表1可以看出,在定位个数上,融合定位除去一个初始点外,均收敛到一个定位值。从CEP对比上可以看出,融合定位比传统算法在定位精度上有比较大的提升。
由图9可以看出,最高迭代次数不超过30次,而且由于后面初始点(清理超过Δt的信号参数后)用的是前面的最优解,因此后面点迹的迭代次数很小。
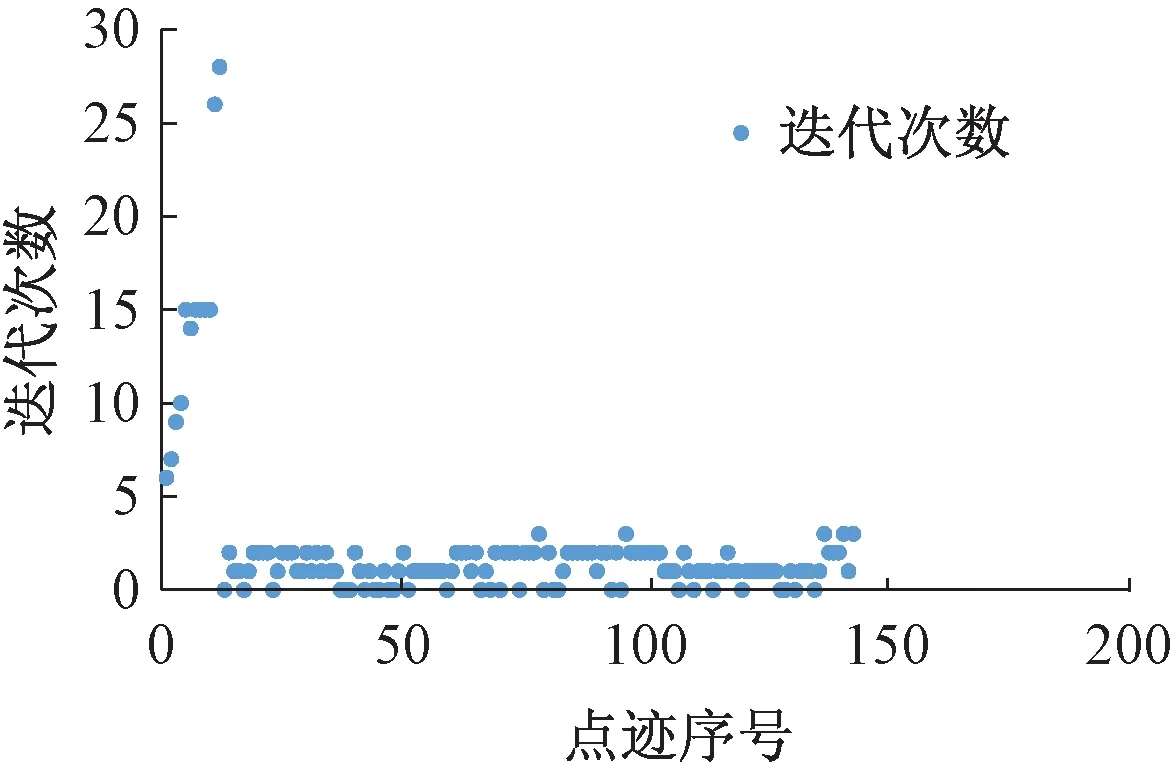
图9 迭代次数分布图
3.2 目标匀速曲线运动仿真
仿真场景如图10所示,其中主站(侦察站)为固定站,非合作辐射源0和非合作辐射源1为固定站,非合作辐射源2为运动的辐射源,以500 m/s的速度做圆周运动。未知目标0为待测目标,以500 m/s的速度做匀速曲线运动,每隔5 s 1个定位点,一共145个定位点,运动轨迹如图10中曲线1。
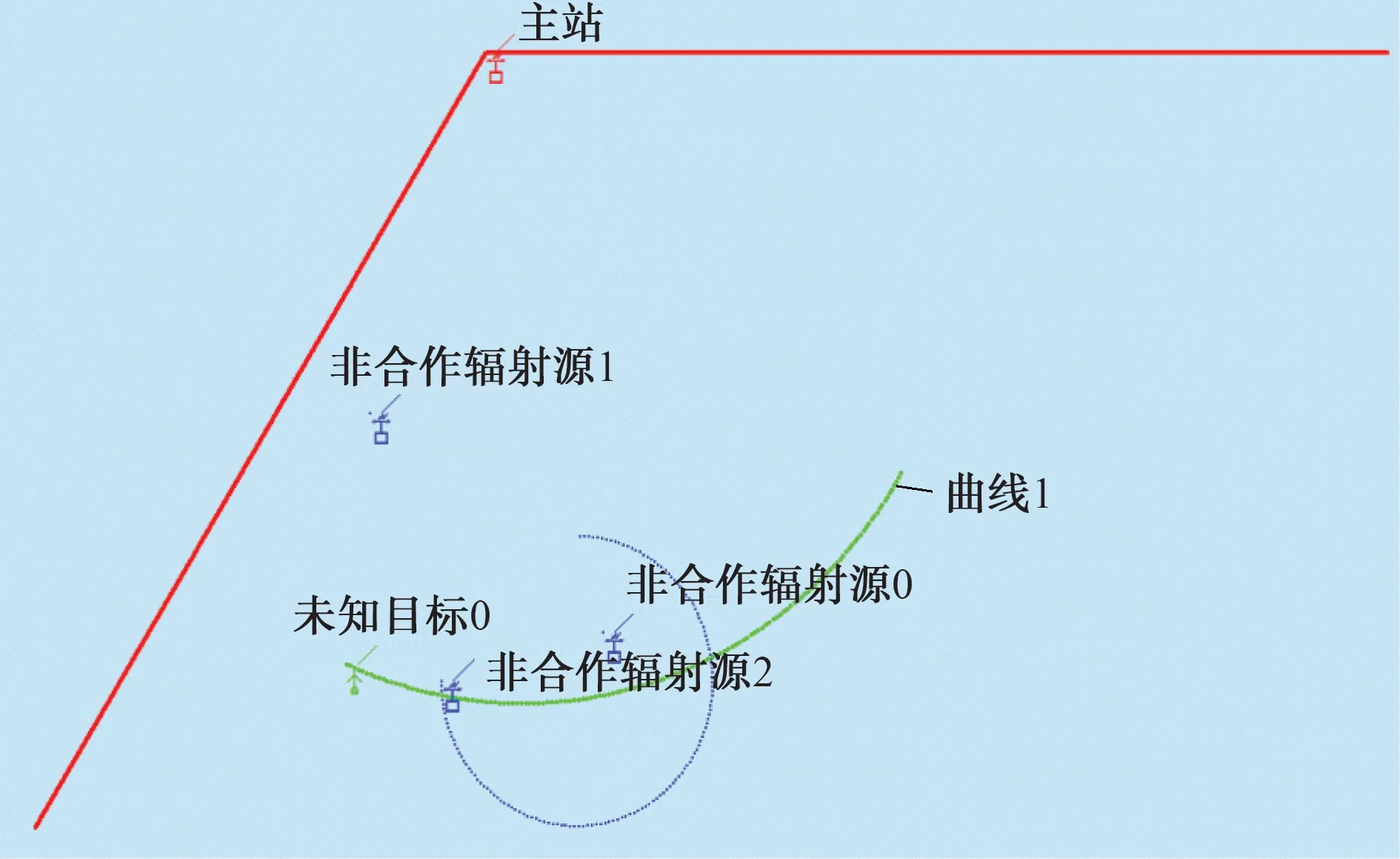
图10 匀速曲线运动仿真场景
时差均方根στ为200 ns,测向均方根σθ为1°。在目标飞行过程中,非合作辐射源0、非合作辐射源1、非合作辐射源2分别用传统方法(2)定位的点迹如图11、图12、图13所示。融合算法Δt取值为1 min,定位点迹如图14所示。
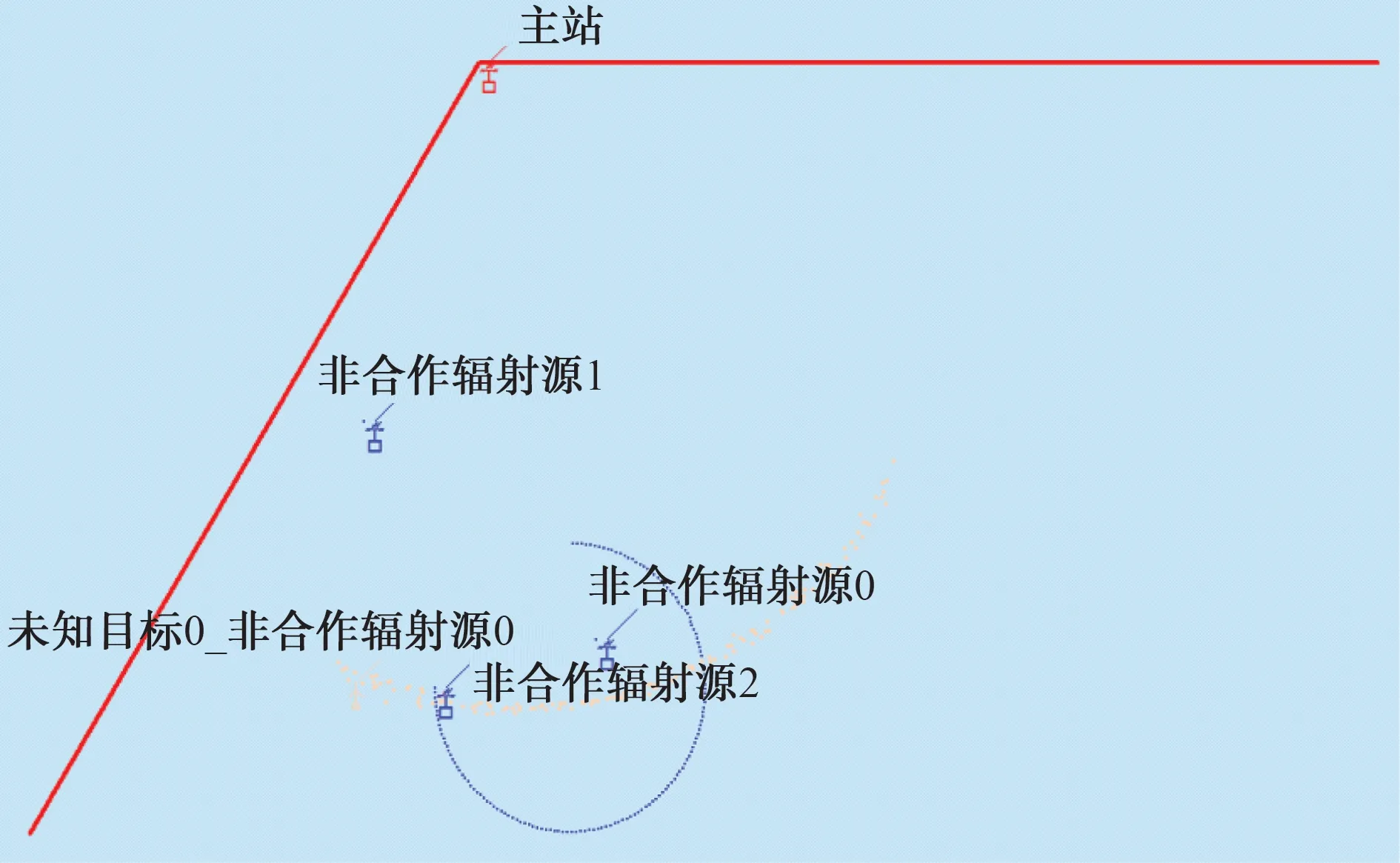
图11 非合作辐射源0定位点迹

图12 非合作辐射源1定位点迹
图13 非合作辐射源2定位点迹

图14 非合作融合定位点迹
从图10到图14的仿真结果对比可以看出,在目标匀速曲线运动状态中,融合定位算法产生的点迹也能达到3.1节匀速直线运动的效果。
传统算法和融合算法的CEP对比如表2所示。
由表2可以看出,在目标匀速曲线运动状态中,融合定位算法比传统算法在定位精度上也能有比较大的提升。

表2 传统算法和融合算法对比
根据图15可以看出,和3.1节相比,最高迭代次数仍不超过30次,但是由于目标做曲线运动,后面点的迭代次数明显高于3.1节匀速直线运动场景。

图15 迭代次数分布图
4 结束语
综上所述,本文提出的这种多非合作辐射源的融合定位算法,在目标近似匀速直线运动和转弯弧度不大的匀速曲线运动状态下,融合算法的迭代次数不高,在截获次数、点迹平滑度、定位精度上有所提升,特别是定位精度有比较显著的提升。