基于无人机低空遥感和现场调查的潮滩地形反演研究
2021-09-24赵志远张晋磊王宪业张利权
李 阳,袁 琳,2,赵志远,张晋磊,王宪业,张利权
(1.华东师范大学河口海岸学国家重点实验室,崇明生态研究院,上海 200241;2.长江三角洲河口湿地生态系统教育部/上海市野外科学观测研究站,上海 202162)
0 引言
潮滩是海陆交界地带受潮汐影响的区域,在长江口,潮滩是滨海湿地的主要类型之一,通常包括光滩、植被带、潮沟等地貌单元。它不但是海岸防护的重要组成部分,还具有气候调节、生物多样性保护、促淤造陆、固碳等显著的生态服务功能[1-2]。在全球海平面上升和人类干扰活动共同影响下,沿海生态系统逐渐丧失和退化,潮滩面临着不断蚀退的威胁[3],如何有效保护长江口的滩涂资源变得至关重要。滩面高程是潮滩地貌形态特征的体现,不同时刻滩面高程变化可以反映该区域潮滩的冲淤动态,同时它也是影响潮滩动态和盐沼植被分布的重要因素[4]。在类似长江口潮滩这样具有潮汐作用的盐沼湿地生态系统中,只有当潮滩高程超过一定阈值,盐沼植被才能成功定居[5]。此外,不同盐沼植物在潮滩分布的最适高程也有所不同[6],厘米级的海拔差异就会导致植被群落结构发生显著变化[7-8]。因此,高精度、大面积的潮滩地形数据是准确分析潮滩冲淤演变和盐沼植被演替趋势的前提[9-10],也是探究潮滩生态系统对环境变化响应以及预测潮滩格局演变不可或缺的数据基础[3,11]。
目前,潮滩地形监测方法通常分为遥感监测和地面监测2类。遥感方法包括立体像对匹配、水边线提取、合成孔径雷达干涉技术测量等,它们具有大范围测量能力,但是精度相对较低、时效性差[12]。地面监测常用方法有全站仪测量、基于全球导航卫星系统(global navigation satellite system,GNSS)和实时动态差分技术(real -time kinematic,RTK)的GNSS-RTK测量、基于非接触式高速激光测量技术的三维激光扫描(terrestrial laser scanner,TLS)测量等[13],它们具有较高的精度,但是测量面积小、仪器和人力成本高、测量效率低[14-15]。RTK和TLS技术是现有方法中较常用且具有最高精度的方法。RTK技术定位快速准确,水平和垂直精度极高[15],但是每次仅能获取单点数据,测量效率低。TLS技术具有极高的垂直和空间精度,能够有效获取平面高程数据,但是TLS扫描范围有限、花费的时间和经济成本较高,由于激光无法穿透高盖度植被,导致TLS观测技术难以准确获得植被覆盖下的潮滩地形[14]。因此,尽管目前已有多种方法可以用来测量潮滩地形,但是依旧难以实现同时具备低成本、高精度、大面积、可滤除植被的潮滩地形测量[16],亟须寻找一种低成本、高精度、易操作且能够较准确滤除植被影响的大尺度地形监测方法。
无人机(unmanned aerial vehicle,UAV)低空遥感是近年来兴起的新型监测技术,具有轻便、易操作、工作效率高等优势,它的发展使得高精度、高时效性的遥感影像获取成为可能[17-18]。运动结构(structure from motion,SFM)算法是基于多个图像的运动视觉差异建立物体3D模型的一种计算机技术,它可以通过大量重叠的2D图像,提取包含高密度三维信息的点云,从而获得准确的数字地形信息[19-20]。将UAV低空摄影测量技术和SFM技术相结合,为低成本、大面积的地形测量提供了可能[16,21]。Mancini等[16]用UAV测量了海岸沙丘的地形,并验证了其精度与TLS技术相当;Dai等[22]用UAV测量了光滩的地形,表明使用UAV定期监测光滩是可行的。然而自然潮滩的潮间带区域往往覆盖有盐沼植物,通过UAV遥感只能测量到植物冠层的高程,为了获得准确地形,还需要进行植被滤除来去除盐沼植被的干扰。植被滤除目前主要是借鉴激光点云数据的滤波算法[13,23],需要有较多的点云穿透植被落到地面上,而盐沼植被密度较高,光线不易穿透,植被滤除精度会大幅降低,因此需要探索一种更加有效的植被滤除方法。
本研究以位于长江口的上海崇明东滩的潮滩湿地为典型研究区,通过UAV低空遥感获取研究区航拍影像与可见光波段信息,然后提取影像三维坐标信息,构建高精度潮滩数字表面模型(digital surface model,DSM),获得光滩地形数字高程模型(digital elevation model,DEM)。此外,将从UAV影像可见光波段中提取的植被指数与野外现场观测的植物株高拟合,建立株高反演模型滤除植被,获得潮滩盐沼植被区的地形DEM数据,综合实现潮滩地形DEM的大尺度的准确反演。以期为大范围监测潮滩地形提供一种易操作、高效、准确的方法,为海岸带滩涂湿地保护和管理提供重要的技术支撑。
1 研究区概况及数据源
1.1 研究区概况
崇明东滩位于上海市崇明岛东部(N31°25′~ 31°38′,E121°50′~122°05′)(图1),为亚热带季风气候,年平均气温为15.3 ℃,年平均降水量为1 022 mm,该区域受不正规半日潮的影响,是长江口规模最大,发育最完善的河口型滩涂湿地[24]。本文的研究区位于崇明东滩鸟类国家级自然保护区南部的团结沙潮滩的盐沼植被前沿(图2),包含了光滩和盐沼植被2种生境(图3)。研究区分布的盐沼植被主要为藨草属(Scirpusspp.)的海三棱藨草(Scirpusmariqueter)和藨草(Scirpustriqueter)混生群落,平均株高约为30 cm,植被盖度60%~90%。

图1 崇明东滩地理位置Fig.1 Location of Chongming Dongtan

图2 研究区地理位置Fig.2 Location of study area
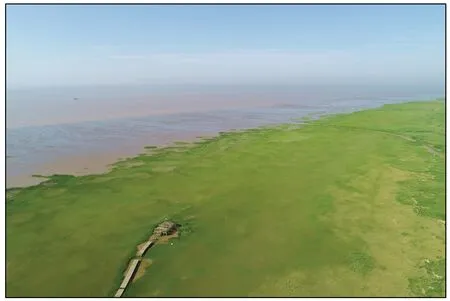
图3 研究区的倾角拍摄图Fig.3 UAV oblique photography picture in study area
1.2 UAV低空航拍及图像处理
2019年5月,天气晴朗的小潮汛低潮期间,使用大疆Phantom 4 Pro四悬翼无人机对研究区进行UAV航测,航向重叠度80%,飞行高度为60 m,地面分辨率为2 cm/像素,航拍区域的面积约为0.3 km2,涵盖了前沿的植被(图4)和光滩(图5)。使用DJIGO 3.1.5控制自动飞行与正射拍照。UAV飞行前,在研究区8个基本方向按米字形结构设立了8个0.5 m×0.5 m的地面控制点(ground control point,GCP),使用RTK(Trimble R8 GNSS接收机)收集了GCP中心的坐标(采用WGS1984坐标系)和高程(采用吴淞高程系统)的RTK测量值,后期通过GCP的校正,可以将UAV航测的成果变换到指定参考系中。

图4 盐沼植被的正摄图像Fig.4 UAV orthophoto picture of saltmarsh plants

图5 光滩的正摄图像Fig.5 UAV orthophoto picture of bare flat
1.3 现场观测
在UAV飞行结束后立即对研究区的光滩区和植被区展开现场的高程和植被观测:①高程观测使用RTK(Trimble R8 GNSS接收机)测量了光滩区14个地面点和植被区域30个地面点的坐标和高程(图6),用于后期UAV影像反演地形的精度验证;②植被区内分别设置2条垂直和平行于海堤的样带,在样带上随机选取30个样点,以每个样点为中心设立0.5 m×0.5 m的样方,使用 RTK(Trimble R8 GNSS接收机)测量每个样点的坐标,并使用5点法现场测量样方内植株株高,后计算平均株高。

图6 研究区的采样点分布Fig.6 Location of sampling points distribution
2 研究方法
2.1 潮滩植被滤除及DEM反演
利用Pix4D Mapper 4.4.3软件对野外拍摄获取的UAV影像进行数据处理,在该软件中,通过SFM点云生成、GCP坐标校正、创建网格、生成纹理等处理后,生成研究区域的DSM和包含红光、绿光、蓝光波段信息的正射遥感影像。由于SFM算法测算出的是地物间的相对高差,所以再通过GCP坐标校正将坐标系和高程转化到了统一的参考系统当中(本研究采用吴淞高程基面、WGS84坐标系和UTM 51N投影),以便与不同时期、不同地形测量方法获取的DEM产品进行比较。
UAV影像经过Pix4D Mapper 4.4.3软件处理后生成的研究区的高精度DSM显示了潮滩表面的DEM。在光滩表面没有建筑或植被遮挡,该区域的DSM即为光滩区地形的DEM。
对于植被区,由于有盐沼植被遮挡,DSM显示的是潮滩植被冠层的高程,而不是滩面的高程信息。为了获取植被区DEM,首先使用ENVI 5.3软件提取UAV正射遥感影像中的波段信息,基于UAV影像的红绿蓝3个波段的像素值,获得研究区的可见光差异植被指数(visible-band difference vegetation index,VDVI)[25]。其表达式为:

(1)
式中,ρ红,ρ绿和ρ蓝分别为影像在红光、绿光、蓝光波段的像素值。
利用MATLAB 2019软件将地面采样点处的VDVI指数的值与野外样方调查的植物株高建立株高反演模型,建模时随机选取70%株高数据用于建模,剩下30%用于反演模型精度评估。
在ENVI 5.3软件中通过株高反演模型将整个研究区的空间VDVI指数分布反演为整个研究区的空间植被株高分布,再利用ArcGIS10.5软件将植被株高从植被区的DSM中滤除,获得潮滩地形的植被区地形的DEM,潮滩DEM的具体测量流程如图7所示。

图7 潮滩地形测量流程Fig.7 Flow chart of tidal flat topographic reconstruction
2.2 地形精度验证
以RTK野外现场测量的滩面高程数据为真实值,UAV地形反演结果为测量值,计算均方根误差(root mean square error,RMSE)[26]进行地形精度验证,评估UAV植被滤除和地形反演的效果。
3 结果与分析
3.1 盐沼植物株高与植被指数关系
图8为株高的VDVI反演模型,图中阴影为95%置信区间。从图8可以看出,UAV影像反演获得的研究区藨草属植物VDVI指数值主要集中在0.04~0.15之间,野外监测获得的株高范围是18~45 cm。通过拟合可以看出,藨草属植物株高与VDVI指数之间具有显著正相关关系(R2=0.71,RMSE=4.07 cm),表现为随株高的增加,VDVI指数值也呈现增大趋势。当藨草属植物株高在25~35 cm区间时,株高反演的置信区间最窄(±1.7 cm)。

图8 株高的VDVI反演模型Fig.8 VDVI inversion model of plant height
3.2 潮滩地形反演结果
UAV遥感影像经过式(1)反演后,研究区内藨草属植物群落的VDVI指数值在0.02 ~ 0.16之间(图9)。进一步利用株高反演模型获得的研究区盐在沼植物株高结果表明,该区域盐沼植物株高变化范围为20~50 cm (图10),与野外实测的株高变化范围一致。当使用VDVI模型滤除植被后,可以看出研究区域整体高程变化在2.0~5.0 m之间(图11),由陆向海呈现逐渐递减的趋势,且呈带状分布。

图9 研究区盐沼植被VDVI分布Fig.9 VDVI distribution of saltmarsh in study area

图10 研究区植物株高分布Fig.10 Saltmarsh height distribution in study area

图11 滤除植被后的潮滩地形Fig.11 Tidal flat topography after filtering vegetation
3.3 地形反演的精度验证
反演得到的高程与RTK测量高程比较结果如图12所示。从图12可以看出,在光滩区域,UAV反演地形结果与野外实测的RTK测量高程较为接近1∶1(RMSE=0.07 m),表明使用UAV反演的光滩地形较为可靠,能够直接应用于光滩地形的反演。而在植被区,从误差分析结果可以看出(表1),受到盐沼植被的干扰,若不进行植被滤除,植被区地形反演精度(RMSE=0.33 m)显著低于光滩区,且UAV反演的潮滩高程略高于野外现场RTK实测值(图12(a))。在使用株高反演模型滤除植被后,植被区地形精度显著提升,RMSE从0.33 m减小至0.14 m,地形反演精度提高了约60%。对于整个研究区的地形反演结果而言,通过植被滤除后,地形精度RMSE为0.12 m,与未进行植被滤除时的反演精度(RMSE为0.28 m)相比,精度大大提高。

(a)植被滤除前 (b)植被滤除后
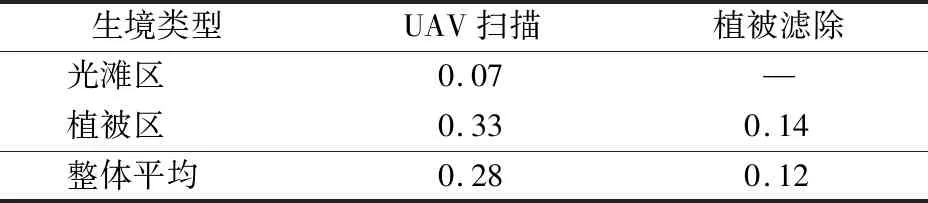
表1 不同生境植被滤除前后的地形反演RMSETab.1 Terrain error of inversion before and after vegetation filtering in different habitats (m)
4 讨论
在潮滩生态系统中,厘米级的地形高程差异就能对潮滩的生态结构和功能造成影响,因此获取高精度的地形对潮滩湿地生态系统研究十分重要[7-8]。到目前为止,传统遥感方法获取的地形DEM精度较低,难以满足研究的需要,而高精度的地形DEM构建大都需要费时费力的现场工作来进行,在潮滩地区更是受到有限调查时间和范围的限制[21]。目前的SFM技术由于具有易于使用、自动化程度高、对图像采集和相机校准容易等优点,使得用低成本的设备来快速获得高精度的DSM成为可能[27]。而轻小型UAV具有轻便灵活、云下飞行和高时效性等特点,为SFM技术提供了极佳的应用场景,其数据产品的优秀质量已被多个研究验证[16-22]。对于受潮汐影响的复杂潮滩区域而言,由于部分潮滩表面积水和水饱和度较高,基于SFM技术有时难以从积水和水饱和沉积物中提取出足够的点云来构建地形[21]。对于这些区域,通过UAV近距离飞行可获取足够多的高空间分辨率图像,以帮助识别光滑表面的地面纹理,减少计算误差,可大大提升自动点匹配和SFM点云提取的成功率[21,28]。
本研究将SFM技术与野外监测和遥感图像处理相结合,开展潮滩地形反演研究,结果表明结合现场观测和UAV技术的地形反演可以实现高精度植被下潮滩地形反演目标。该方法与常规方法相比具有以下显著优势:
1)潮滩植被区地形反演精度显著优于其他技术。本研究在光滩区地形的RMSE为0.07 m,与TLS技术监测的地形精度接近[13,23];但在植被区地形精度为0.14 m,优于谢卫明等[23]使用TLS技术的潮滩地形监测结果得到的0.25~0.35 m误差。且TLS技术在植被密度高于60%时,激光无法穿透植被,地形精度还将显著下降[13],而本研究中,植被区盖度均在60%~90%,依然可以获得令人满意的精度,很好地解决了TLS等技术难以准确滤除潮滩盐沼植被高度的问题。
2)UAV的监测范围显著扩大。TLS设备的扫描范围仅有2~3 km,在潮滩上的有效范围不超过半径1 km,且远距离的扫描精度较低,而多站扫描较为耗时。RTK单点精度极高[15],能够直接测量到植被下方的潮滩地形,但是RTK将多个单点数据建立网格生成DEM,而在潮滩地区手工测量只能获得十分有限的观测点,极大限制了RTK观测大范围地形监测范围。而UAV扫描范围可以通过更换电池持续飞行不断扩展,精度不会随着范围扩展有任何改变。
3)UAV监测的人力成本和经济成本显著降低。首先传统的RTK技术完全依靠观测人员通过行走获得指定地点的数据,而TLS观测技术需要将仪器运输到扫描区域进行工作,TLS及它的标靶、三脚架等相关配套设备重达数十斤,若在泥泞难行的潮滩环境中操作,非常费时费力。UAV通过远程操控,不受地域条件限制,方便易行,效率高。其次,UAV地形监测技术更加经济和高效。TLS设备价格通常在百万元级别,UAV的设备价格通常在万元到几十万元级别,且UAV观测的人力成本也大大低于TLS观测技术。
本研究和已有研究均表明,UAV技术和传统技术对光滩地形可获得精度较高的结果[22],但相比光滩,潮滩植被区的地形监测存在更大的难度,主要原因是植被株高滤除的准确性决定了地形反演的准确性和误差[13,23]。目前潮滩地形监测中植被滤除方法并不多,主要是通过激光点云数据的滤波算法[13,23]提取出穿透植被的激光为地面点,从而滤除与地面点相差过多的植被点。这类算法需要足够的点云穿透植被落在地面上,如果植被群落密度过大,激光较少穿透植被,传统的点云过滤算法很难实现对植被的滤除。相较点云植被滤除方法的局限,UAV遥感影像中含有丰富的地物光谱信息,利用UAV影像波段数据进行植被滤除,能够有效弥补点云滤除的缺陷。首先,UAV所摄可见光图像由红光、绿光、蓝光3个波段构成,由于不同生理状况的绿色植被在各个波段反射率不同,通过波段运算获得的不同植被指数,已被证实可以用来反映植被的生长信息[29]。目前研究者基于UAV的可见光波段,组合开发了许多植被指数用来提取植被生长发育信息[30-31]。其中VDVI指数包含了红光、绿光、蓝光3个波段的信息,提取精度高且阈值容易确定,对健康绿色植被信息具有较好的提取效果,是常用的可见光植被指数[25]。采用VDVI指数与株高建立反演模型进行植被滤除,仅需要采集标准样方数据并与VDVI指数建立关系,实施十分便捷,大大节省了人力物力。但受到地理位置和季节因素影响,植被VDVI指数会随地点和季节变化发生变化,因此本文建立的株高反演模型在更大范围应用时,需要在指定地点的不同季节采集数据构建反演模型,再进行地形反演。
尽管利用UAV技术进行潮滩地形反演作为遥感技术的一种应用,具有显著的优越性,但依然会受到气候和地表物理因素的影响,因此在具体实施过程中应注意以下要点:①观测时应该尽量选择小潮和阴天的清晨或者傍晚进行飞行,这样可以减少滩涂表面积水或沉积物的反射对结果的影响;②观测时要避免在大风天气飞行,因为轻小型UAV抗风能力偏弱,大风造成的机身稳定性下降会降低数据精度甚至危及UAV安全;③合理布设GCP,研究证明在研究区外围不同方向布设5~8个GCP是较优方案,即使GCP数量大量增加,数据的精度性并不会随之明显增加[17,28]。当然,在泥泞的潮滩布设GCP是一项耗时耗力的工作,对于某些具有GNSS-RTK定位的UAV,由于摄像机精确位置已知,每张影像都包含了精确定位并可以从相对系统转换到绝对系统,因此UAV内置天线位置能够极好代替地面GCP,可大幅削减了UAV地形反演过程中的人力成本,大大扩展了UAV的工作范围,使得利用UAV进行地形反演成为了一项低成本低劳动力的监测工作。利用搭载RTK的UAV进行一次低空飞行,便能够带来具有精准坐标系的高分辨率正射影像和地形DSM,这对于利用UAV实施潮滩地形反演具有极大的帮助。
5 结论
本研究表明结合UAV低空遥感和现场调查的方法可以实现对潮滩光滩地形和草下地形的精确反演,其光滩区地形精度与高精度三维激光扫描仪测量结果接近;植被区地形经过植被滤除后精度可提升60%。利用UAV低空遥感,将SFM技术与野外监测和图形处理相结合进行潮滩地形反演,将大大减少地形监测的人力与经济成本,在拥有高精度的同时还能较好地解决植被滤除的技术问题,实现大面积自然潮滩的地形反演,凸显出了UAV地形反演方法大面积推广的价值。可以预见,随着UAV搭载RTK技术的普及和推广,以UAV低空遥感和SFM算法为基础的低成本、高效率、高精度地形反演技术将越来越被广泛应用于潮滩地形监测、冲淤演变分析、地貌-盐沼植被相互作用,滩涂湿地环境的保护与修复等方面的研究。