蠕动泵控制系统设计*
2021-09-24唐家伟王志强王孟
唐家伟,王志强,王孟
(陕西理工大学物理与电信工程学院,陕西 汉中 723000)
蠕动泵所用电机一般分为直流有刷电机、直流无刷电机、交流电机、步进电机等几类。无感无刷直流电机(BLDCM)没有机械换向器和电刷,它不仅在结构和功能上保留了有刷直流电机的优秀的特性,还具有比传统电机更优良的电气调试性能,噪音更小,体积更小,可靠性更高,电机稳定性更好,维护更简单。凭借着无刷直流电机出色的转矩特性,在工业生产和生活中有着广泛的应用[1-3]。在制药行业中用于药物包衣制粒和药业分装,需要精准控制灌装量,为更好地控制流量,设计一种无刷电机蠕动泵控制系统,实现数字式流量、转速控制。
1 系统设计方案
本系统无位置传感器无刷直流电机的控制系统中必须要求实时无误地检测转子的位置信号,根据位置信号来实现对电机的启动和停止控制,根据对电机的PWM控制、PID调节等对无刷直流电机的转速实现控制[4-6]。系统结构总图如下图1所示:
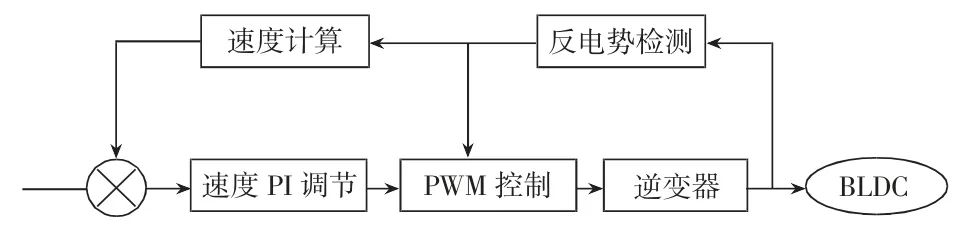
图1 系统结构总图
1.1 驱动电路设计
无刷电机驱动电路采用IR2101S与N沟道MOS方式。IR2101S芯片是半桥驱动,采用上桥跟下桥的驱动方式,也就是一路驱动需要1个IR2101S和2个MOS,三路总共需要6个。U2是IR2101S,Q1,Q2是IRF540NS N沟道MOS,D1,C2组成上桥自举电路,R1,R11为MOS基极限流电阻[7]。R18为驱动采样功率电阻,大负载时可以更换大功率的,防止电流大时烧毁。通常用一个电容和一个二极管组成的自举升压电路,电容存储电荷,二极管导通和截止作用可以防止电流倒流,在系统频率相对较高的时候,电容电压就会和电源电压相叠加,起到升压作用。驱动电路图如图2所示:

图2 无刷电机驱动电路图
1.2 反电势位置检测电路设计
反电势位置信号检测模块的芯片采用了LM339N芯片,它的响应时间为1.3us,满足电机设计的控制要求。电路工作原理为:直流电机A、B、C三相绕组端电压UA、UB、UC通过相关电路(电容滤波电路和电阻分压电路)传至LM339N芯片的MA,MB,MC三个引脚(实际工作的时候是六相导通模式中的一种),然后将得到的电压值与中点的电压值相比看是否相等,当小于中点值时输出低电平,当相等时就是要检测的过零点,当大于中点值时输出高电平,如此便得到三相电机反电势的过零点。反电势电压比较电路图如图3所示:

图3 反电势电压比较电路图
2 控制系统软件设计
基于STM32主控芯片的编程实现对无位置传感器无刷直流电机的控制、电机启停与电机调速等。总体软件设计首先是对端口和定时器等部分进行定义和初始化,然后就是对电机启动方法的定义和无感启动的转子位置检测方法定义、换相控制以及转速的调节等。然后确定是否符合目前电机转速的控制要求,初始化完成对单片机I/O端口、系统的控制时钟、系统内部的定时器进行初始化。判断电机状态处于静止还是运行状态,扫描按键,未做任何按键操作时,B key=0,根据B key来判断当按下按键2的时候电机是启动还是停止,后面的两个按键则是对电机进行调速用的。按键统一采用低电平有效。如图4所示:

图4 系统主程序流程图
2.1 流速控制设计
在该设计中,通过按键控制电机的转速来改变蠕动泵流速,按键采用低电平有效。当key1按下时,速度会按照设定的步进值进行累加,根据该设定的速度来调节电机当前的转速。当key2按下时,速度会按照设定的步进值进行减小,根据该设定的速度来调节电机当前的转速。直流电机的PWM调速是通过调幅的方式,改变了传输到电机电枢电压的幅值达到电机调速,从而控制蠕动泵流速[9]。PWM调速不是调节电流的,它是通过调节方波高低电平在一个周期内的时间比,比如当占空比为20%的时候,就会有20%的高电平和80%的低电平。占空比越大,高电平时间越长,输出脉冲幅度越高,电压越高,电机转速越快。设计采用的STM32内部具有高级定时器,可以用定时器模拟PWM调速,通过程序执行软件延时程序交替改变端口某个二进制输出逻辑状态来产生脉宽调制信号,设置不同的延时时间得到不同的占空比。流速控制流程图如图5所示:
同时,按照《绿色生态城区评价标准》(GB/T 51255—2017)中关于绿色建筑的评价要求2),为高标准规模化推动绿色建筑发展,拟在广州市选择5个具备一定规模、二星级潜力较大区域作为绿色生态示范区的试点(图9),包括中新广州知识城南起步区、广州国际创新城南岸起步区、广州空港经济区起步区、广州南沙新区明珠湾区起步区和海珠中央创智岛。

图5 流速控制流程图
3 实际测试与分析
电路正常工作电压为24V,最大工作电流10A。通过PWM控制信号实现无刷直流电机的启动以及调节PWM占空比实现电机转速控制,整体电路部分和反电势检测电路部分。用称重式测量,将容器放在安装有称重传感器的装置上,在检查之前需要将质量数据清零。启动蠕动泵控制系统,设定流速分为慢速(10ml/min)和中速(50ml/min),以及快速(100ml/min)。控制水流流入容器,称重传感器将采集到液体质量。记录液体质量和时间,并依此数据计算流速,蠕动泵流速如表1所示:

表1 蠕动泵流速测量结果表
经过测试,根据表中的数据可以看出,在三种不同的灌注速度下,测量误差都小于1%。达到精准控制流速的目的。
4 结论
本文设计了无刷直流电机蠕动泵控制系统。该系统通过STM32主控实现对无位置传感器无刷直流电机的控制电机启停与调速调整实现蠕动泵灌注液体流速及流量控制。通过实际测试和应用整个系统运行可靠,流速及流量控制准确,流速控制测量最大误差小于1%。该系统传输实用性较好,相对已有的同类设备系统噪声小,具有一定的应用价值。