基于卫星遥感影像的线树距离测量与树障预警技术
2021-09-24刘兰兰李勃铖毛盾顾苏杨嘉妮杨利波段启平
刘兰兰,李勃铖,毛盾,顾苏,杨嘉妮,杨利波,段启平
(1. 智能带电作业技术及装备(机器人)湖南省重点实验室,长沙410100;2. 带电巡检与智能作业技术国家电网有限公司实验室,长沙 410100;3. 国网湖南省电力有限公司输电检修分公司,湖南 衡阳 421000)
0 引言
由于空间走廊资源的稀缺,输电线路不可避免地要大量穿过各类人迹罕至的山区、林地。随着输电线路下方树木的不断生长,导线与树木之间的距离不断缩小,当小于某一限值后,便会发生树障事故(短路跳闸或树木导电等)[1-2],从而对电力系统的安全稳定运行造成极大威胁,因此需要提前测量和防范。线树距离是指架空线路与树木间的最短距离,运检人员通过测量该距离的大小,即可掌握树障发生的概率,从而判断是否需要进行人工处理。因此,对线树距离进行常态化、大范围、高精度、无风险、经济性测量和及时预警处置,是确保线路安全稳定运行的重要环节。
早期的线树距离测量多以目测法为主,这种方法主要依靠巡检人员的经验和直觉,可信度较低。相关单位为了提高线树距离监测的准确度,先后引入了激光测距仪和光学经纬仪等测量仪器。但由于输电线路空间走廊长、途径区域地势复杂,采用仪器测量需要耗费大量人力物力,难以满足线树距离测量需求。
为提高巡检效率,东北电力大学构建了包含风速、温度、树高预测等因素在内的线树距离预判模型,并使用输电线路在线监测设备完成了对线树距离的测量[3]。这种方法虽然能够实现线树距离的实时稳定监测,但在线监测设备投资高昂、维护困难、数据传输不便,因此并未能得到推广应用。为降低测量成本并精准掌握输电线路沿线的数据,南方电网超高压公司采用直升机搭载激光雷达获取了输电线路沿线的三维激光点云数据,构建出了包含高程信息在内的沿线三维模型,实现了对线树距离的快速、精确测量[4],但这种方法专业性较强,难以实现线树距离的常态化监测。针对这一问题,技术人员开始尝试使用立体像对来匹配空间点云数据。得益于高精度相机的应用和摄影测量技术的突破,这种方法得到的点云数据具备和激光雷达相类似的精度,使得利用便携无人机搭载高清相机进行倾斜摄影并构建输电线路沿线三维模型的方法成为了可能[5-6]。贵州电网输电运行检修公司利用这一技术成功实现了线树距离的测量[7]。然而无人机的续航里程和通信距离均较短,难以实现输电线路通道的快速覆盖,且存在无人机坠机的风险,会对输电线路的安全稳定运行造成潜在威胁。
为解决上述问题,本文依托摄影测量原理,从卫星遥感影像的立体像对中匹配并得到输电线路沿线的点云信息,从而构筑出三维立体模型。在此基础上,分别结合监督分类法和架空导线的悬链线方程,获得树冠和输电线路的空间参数信息,并依照相关规程,制定预警策略,研发相应的预警软件,实现了线路距离的常态化、大范围、高精度、无风险、经济性测量及树障风险的及时预警。
1 线树距离测量需求分析及方法选择
1.1 测量需求分析
输电线路沿线跨越距离大[8],地形环境复杂[9],再加之树木具有不断生长的特性,导致线树距离始终处于动态变化中,因此对线树距离的测量需要同时满足常态化、大范围、高精度、无风险、经济性的要求。从现有的线树距离测量方法来看,主要分为直接测量法和间接测量法2类。
直接测量法的思路主要是通过目测或使用各类观测仪器对输电线路沿线进行巡视和测量,从而得到线树距离。这类方法的优点在于方式灵活,测量精度较高,但存在工作强度大,测量周期长,隐患排查不及时等缺点。
间接测量法的思路主要是通过各种方式和方法直接或间接获取到输电线路和树冠的空间参数信息,再通过换算得到线树距离。现有的间接测量方法如利用在线监测设备测量、利用直升机或无人机进行实地激光点云测量、利用无人机进行倾斜摄影均能够实现线树距离的测量,但由于这些技术自身的局限性,均无法同时满足线树距离的测量需求。
综上所述,在线树距离测量方面亟需一种更为有效的方法,使之能够同时满足所有的测量需求。
1.2 测量方法选择
从上述分析来看,间接测量法无疑更能满足大范围测量要求,但现有的间接测量方法无法满足常态化、无风险和经济性测量的要求。
近年来,卫星遥感测绘技术、立体像对数据处理技术以及图像识别提取技术得到了长足的发展[10]。同时,卫星处于太空轨道中,环绕地球飞行一圈的时间较短,并且能够无视地形环境等因素的影响,影像更新周期短。因此,采用卫星遥感影像对线树距离进行常态化、高精度、无风险、经济性测量及风险预警逐渐成为可能。
与其他的间接测量方法相类似,采用卫星遥感影像进行线树距离测量和风险预警的核心依然是获得输电线路沿线的三维点云数据并得到输电线路和树冠的空间参数信息。因此,整项技术需要分别完成输电线路走廊立体模型建立、树冠及输电线路空间参数获取、线树距离测量及预警3个环节。
2 线树距离测量原理
从上述分析来看,线树距离的测量包含3个主要环节,其中重点是得到树冠及输电线路的精确空间参数信息。下面逐一对其进行分析和处理。
2.1 输电线路走廊立体模型建立
在立体模型建立方面,首先利用卫星获取输电线路所在区域内的一对立体像对,并进行影像配准和RPC参数精化[11-12]。在此基础上,利用式(1)对两张卫星影像的内方位元素坐标进行恢复,即可确保立体相对的坐标与仪器坐标一致。
(1)
式中:x′、y′为内方位元素的初始坐标;Δx、 Δy为遥感卫星的镜头畸变;dx、 dy为大气的折光修正系数;δx、δy为地球的曲率修正参数。
由于立体像对的摄影基线不统一,因此在完成卫星影像的内定向后,还需要进行相对定向,从而恢复立体像对的对关位置。以左像对O1所在的影像观测点S1为原点,Y1轴为主轴,建立如图1所示的空间直角坐标系。
图1中,图1(a)和图1(b)分别为侧视角和重叠角的卫星影像,B为摄影基线。对于每个影像,其空间相对位置都可由位置(X、Y、Z)和姿态(φ、ω、κ)共6个参量表示。其中,φ、ω、κ分别为航向倾角、旁向倾角和影像旋角。
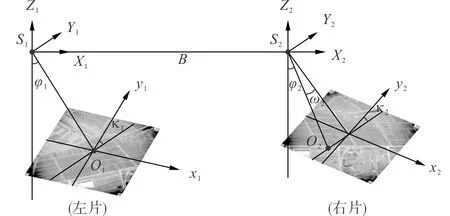
图1 立体像对的相对定向示意图Fig.1 Relative orientation diagram of stereo pairs
结合图1中的几何关系,对于图1(a)而言,有:
XS1=YS1=ZS1=0
(1)
ω1=0
(2)
对于图1(b)而言,有:
YS2=ZS2=0
(3)
其中摄影基线B的长度(即XS2的值)与实际摄影基线的比即为建立起来的立体模型与实际模型的尺寸比,因此摄影基线B(XS2)值的大小可根据需要直接进行设定,剩余需要计算的定向元素即为φ1、κ1、φ2、ω2、κ2。
图1中矢量S1O1、S1S2、S2O2共面,由共面理论可得:
S1S2×(S1O1×S2O2)=0
(4)
对外方位元素(位置)参量而言,其与内方位元素的坐标变换关系为:
(5)
式中:R1、R2分别为φ1、κ1和φ2、ω2、κ2的函数矩阵;x1、y1与x2、y2分别为像点O1和O2在S1-X1Y1Z1和S2-X2Y2Z2坐标系中的坐标;f为主距,即投影中心与影片的距离,由遥感设备自身属性决定。
将式(5)代入式(4)中并进行整理后可得到:
(6)
引入各待定值的近似值之后,将式(6)线性化展开,从而得到:
(7)
式(7)中的5个未知的定向元素只要采用5个以上的同名点进行定向求解,即可实现立体像对的相对定向,使立体像对的相对位置关系得以恢复。
由式(2)—(7)可以求得立体像对的5个相对定向元素,但要进一步恢复其对地的绝对位置,还需要依托地面控制点来求得剩余7个绝对定向元素,从而将相对立体模型纳入到地面摄影测量的坐标体系内,并构建出三维模型,为空间参数的获取提供依据。
在控制点选取上,由于输电铁塔的空间精确三维坐标已知,故可选取输电铁塔作为地面控制点。由三维空间相似变换公式可得:
(8)
式中:Xtp、Ytp、Ztp分别为输电铁塔的空间精确三维坐标;Xp、Yp、Zp分别为输电铁塔的摄影测量坐标;λ为模型缩放比;ai、bi、ci为φ、ω、κ计算出的方向余弦;ΔX、 ΔY、 ΔZ为坐标平移量。
式(8)中有7个未知数,至少需要列7个方程求解,由于每个控制点都包含Xtp、Ytp和Ztp共3个参量,因此3个控制点可满足求解要求。现有文献已经证明,当地面参考点的数量达到7个时[13],可使得平面和高程的定位精度误差分别缩小至0.6 m和2.2 m,继续增加控制点对精度影响不大,故最终选择7个控制点,多余控制点的观测值按照最小二乘法进行平差求解。
求解得到绝对定向元素后,再将摄影测量坐标转换为地面坐标,即可实现输电线路走廊立体模型的建立。
2.2 树冠及输电线路空间参数获取
在得到输电线路沿线的三维立体模型后,还需要获取输电线路与树冠的空间参数信息,才能最终实现线树距离的测量。
2.2.1 输电线路空间参数获取
在导线空间参数获取方面,由于输电线路的直径约为10~50 mm,而包含Worldview-2在内的主要商业卫星所能提供的卫星影像分辨率普遍在0.4~2 m之间,仅通过图像识别难以准确区分。再加之超、特高压输电导线多为分裂导线,上层导线易遮挡下层导线,也会给输电线路的空间参数提取造成困难。
为克服这一问题,可通过已有数据库获取待测输电线路沿线铁塔下横担的空间参数,再利用弧垂计算公式,计算并得到输电线路的空间参数信息。在xoz平面内,通过式(9)所示的弧垂计算公式[14]计算得到输电线路上任意点空间参数。

(9)
式中:σ0为导线的应力;γ为架空输电线路的比载;l为该线路档距距离;h为导线两侧挂点的高差;Lh=0为假设悬链线等高时的导线长度;y坐标由两基杆塔的相对位置和导线挂点所决定。
2.2.2 树冠空间参数获取
在树冠空间参数获取方面,重点是要从输电线路沿线三维模型中精确识别出树冠的区域,并从中找到高程最高的点。
由遥感卫星影像建立起来的输电线路沿线的三维立体模型包含光谱、纹理、大小、形状、相对位置等重要特征信息。根据输电线路沿线可能出现的内容,建立起具体如图2所示的解译标志。

图2 遥感影像的解译标志Fig.2 Interpretation mark of remote sensing image
在监督分类方法中,由于最大似然法的适用条件最广、分类错误小且精度高,因此选用其进行监督分类。采用该方法进行监督分类的核心是:假设影像中每个波段中的每一类统计都近似正态分布,在此基础上计算出影像中所有像元与训练样本的似然度。像元与某一训练样本似然度最高,则该像元即被认为与训练样本归属一类。对任意像元xi,有:

(10)
式中:wi为树冠像元;wl为树冠像元区域;wk为第k类像元;N为影像大小;c为类别大小。若满足式(10),则xi∈wi[15]。
通过上述方法,即可实现对树冠的识别和空间参数提取。
2.3 线树距离测量及预警
在得到树冠和输电线路的空间参数信息后,即可进行线树距离的测量及预警。
线树距离测量过程中,由于只重点关注输电线路沿线附近的树冠空间参数信息,因此只需要根据所获得的铁塔的位置、高度等信息,重点监测以输电线路为中心、左右各50 m范围内的树冠区域中的最高点A(xA,yA,zA)的空间参数。计算点A与输电线路L的最短距离s,该距离即为所需监测输电线路线的线树距离。
得到线树距离后,最后还需依照规范和标准要求,制定预警策略并及时通知巡线人员进行实地勘察并处置,才能最大程度降低安全风险。表1为现行规范下,各电压等级输电线路与树木、作物、灌木等的最小安全距离限值[16]。

表1 输电线路与树木安全距离Tab.1 Safety distance between transmission lines and trees
现行的树障缺陷等级根据线树距离的大小分为一般缺陷(s接近或等于D)、重大缺陷和紧急缺陷等3类,但一般缺陷发展为更为严重的缺陷所需的时间往往较短[17],留给运检人员巡视和处理的时间窗口有限。为此,以安全距离D为标准,对线树距离小于3D的杆塔区间进行重点关注,对线树距离小于2D的杆塔区间进行风险预警,从而使运检人员能够根据全面掌握线路情况,合理安排树障清除时间。
2.4 整体流程
综上所述,可得到如图3所示的线树距离测量与风险预警流程。
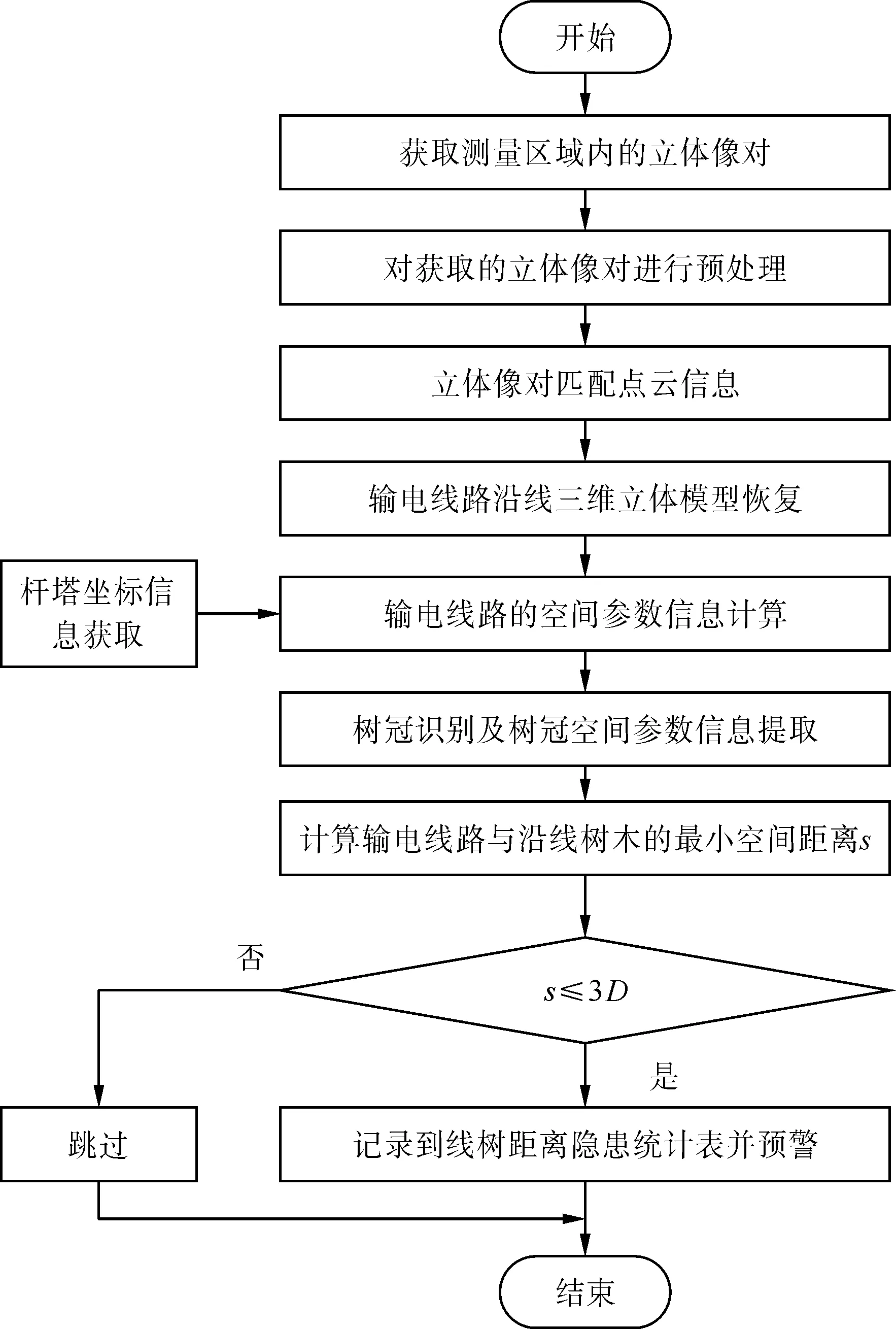
图3 线树距离测量与风险预警流程图Fig.3 Flow chart of measurement and early warning of line-tree distance
3 线树距离实测及结果分析
3.1 输电线路沿线三维模型建立
在得到基于卫星遥感影像的线树距离测量方法后,需要进行实测和分析,从而验证该方法的可行性。
本次测量区域为±800 kV复奉、锦苏线路并行段,其中复奉线、锦苏线所测量杆塔区间各128处,杆塔编号如表2所示。

表2 复奉线、锦苏线测量区间Tab.2 Measuring area of Fufeng Line and Jinsu Line
依照图3所示的线树距离测量与风险预警流程,首先获取测量区间内所有杆塔的位置坐标、高程信息,并得到Worldview-2卫星在2019年11月22日(第1期)、2020年4月13日(第2期)和10月15日(第3期)所拍摄到的±800 kV复奉、±800 kV锦苏线沿线立体像对。通过影像预处理、内定向、相对定向和绝对定向,得到了WGS-84坐标系下的输电线路沿线空间点云信息,并构建出如图4所示的三维立体模型(由于篇幅原因,仅以10月15日为例),其中高程零点为WGS-84坐标系中的椭球表面。
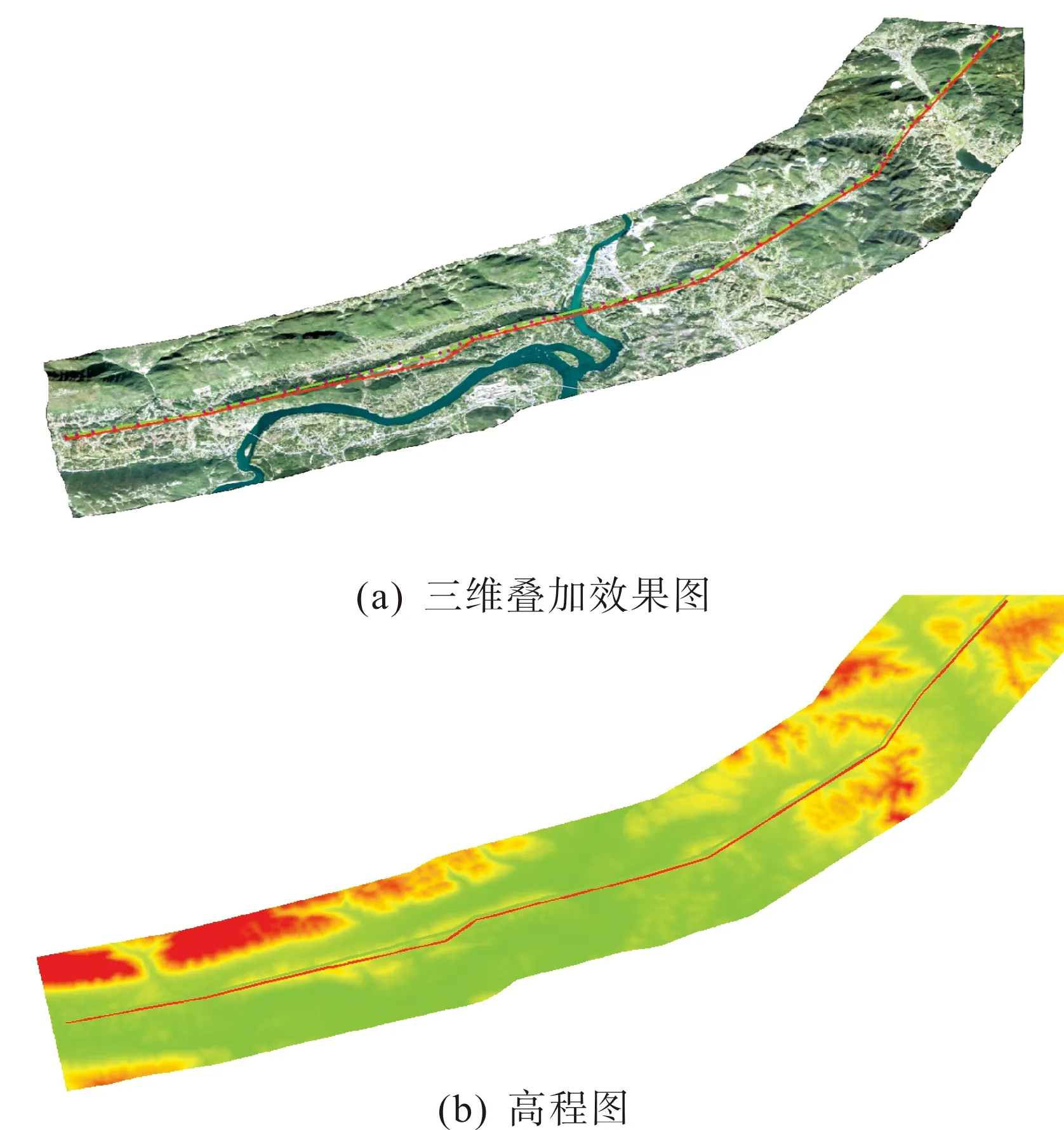
图4 输电线路沿线三维模型Fig.4 Three-dimensional model along the transmission line
结合±800 kV复奉、锦苏线杆塔的坐标信息,并利用架空输电线路的悬链线进行计算,得到了输电线路的空间参数信息。再利用监督分类法中的最大似然法,结合解译标志,识别并得到输电线路沿线树木的树冠区域及树冠最高点的空间参数信息。
3.2 线树距离测量
在得到树冠和导线的空间参数信息后,依次计算得到±800 kV复奉、锦苏线在3期测量中各杆塔区间的线树距离。在3期测量结果中,共发现20处杆塔区间内的线树距离小于3D(复奉线7处、锦苏线13处),其中15处线树距离小于2D,需要重点进行关注。提取线树距离小于3D的20处区间,得到如表3、图5所示的重点关注区间线树距离变化情况。
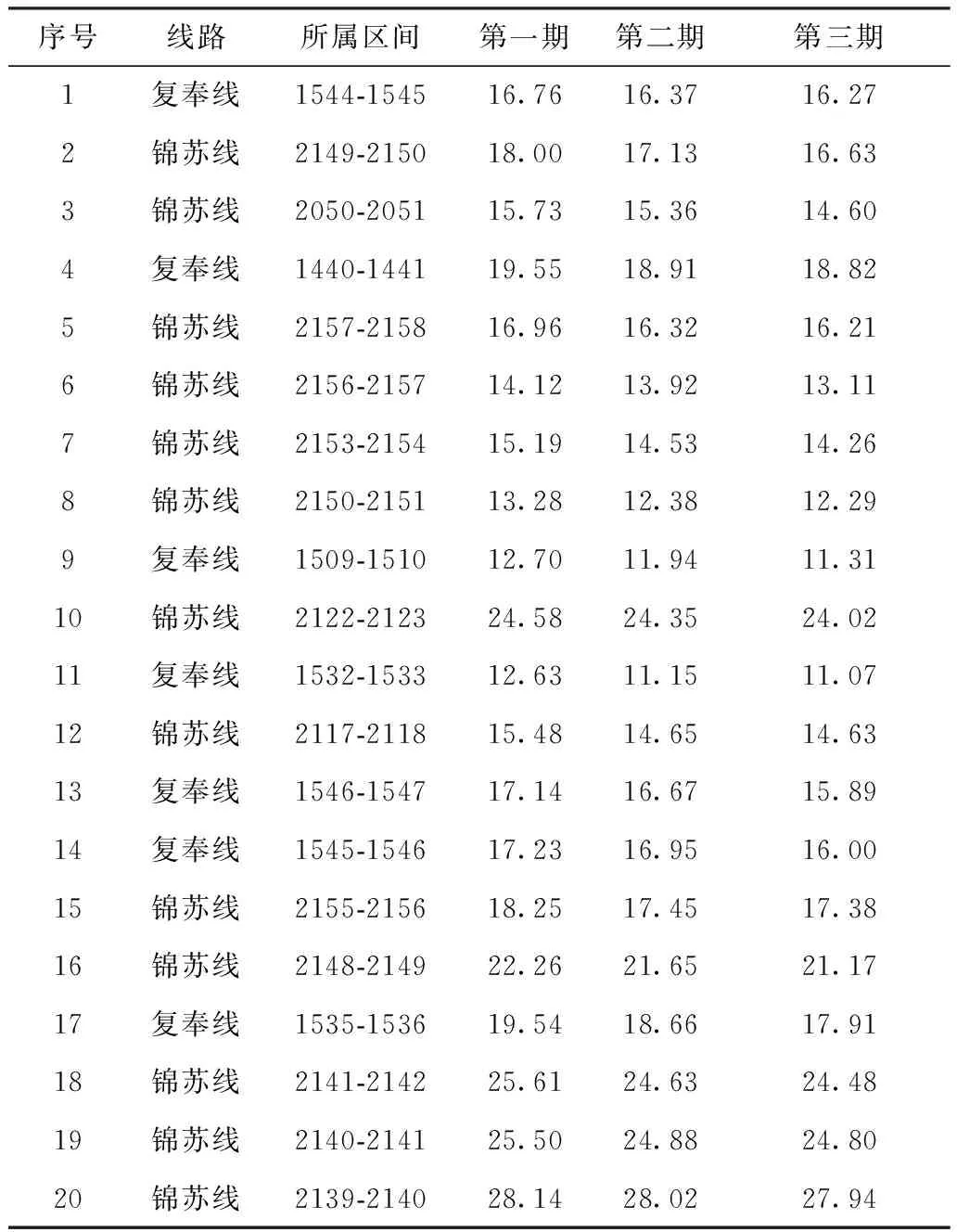
表3 重点关注区间的杆塔区间线树距离Tab.3 Line tree distance between poles and towersm
通过3期的测量结果对比可以发现,20处重点关注区间内的线树距离随着时间的推移而逐渐缩短,缩短区间为0.20~1.63 m,平均缩短0.99 m。而在±800 kV复奉、锦苏线测量区间内,线路下方主要生长亚热带树种,多年生树木的年生长变化趋势[17]与上述测量结果较吻合较好,证明了测量结果的有效性。
同时在测量过程中发现,±800 kV复奉线的1509-1510、1532-1533杆塔区间内线树距离已十分趋近输电线路与树木安全距离的限值要求,需要及时进行排查处置。
3.3 测量结果对比
为掌握线树距离测量的精度并处置潜在隐患,2020年10月16日至20日,国网湖南省电力公司输电检修分公司输电运检三分部使用六旋翼无人机搭载Pandar40P激光雷达,对上述20处重点关注区间进行了实地激光点云复测,得到了各区间内的点云信息并计算出了线树距离。测量平台和实测结果如图6所示。

图6 实测结果Fig.6 Measurement results
将实地激光点云复测结果与第3期卫星遥感影像测量结果进行对比,结果如表4、图7所示。

图7 测量结果对比Fig.7 Comparison results of measurement

表4 结果分析Tab.4 Result analysis
从对比结果中可以看出,与实地激光点云复测结果相比,卫星遥感影像得到的树冠高程误差平均为5.26%,最大误差为10.69%,测量偏差最大为1.72 m。因此,基于卫星遥感影像所还原的输电线路沿线三维模型整体精度较高。
在第3期测量中,20个重点关注区间内的线树距离最小值为11.07 m,最大值为27.93 m。与激光点云实地观测值对比分析,测量误差平均为6.09%,最大误差为15.80%,测量偏差最大为2.42 m,满足工程实际要求。其中,±800 kV复奉线1509-1510、1532-1533杆塔区间的线树距离点云复测结果分别为10.317 m、10.540 m,线树距离已无法满足安全距离限值的要求,故进行了现场处置。
3.4 误差分析
通过对本文方法的分析,线树距离测量误差的来源主要有2个方面:1)树冠空间参数的测量误差;2)导线空间参数信息的计算误差。
在树冠空间参数测量中,造成误差的原因有:1)三维模型还原过程中的系统误差;2)树冠识别误差。在三维模型还原过程时,进行了内方位元素恢复、相对定向和绝对定向3个步骤。相关参数的测量、同名点的选取误差都会使得最终得到的三维模型与实际产生误差。并且,以铁塔作为控制点时,虽然铁塔坐标参数准确,但铁塔范围较大,难以精确选点,也会造成三维模型还原过程中的误差,从而影响树冠坐标的准确性;在树冠识别时,监督分类法能够较好地识别树冠信息,树冠的识别准确率达99.76%,整体识别准确率达96.08%,整体效果如图8所示。但受到三维模型精度和复杂背景的影像,算法对零星的树冠识别准确率还不够高;此外,树冠高度易受到环境和风的影响而发生波动,少部分树冠还易受到杆塔等物体的遮挡,这也是造成树冠空间参数测量误差的重要来源。
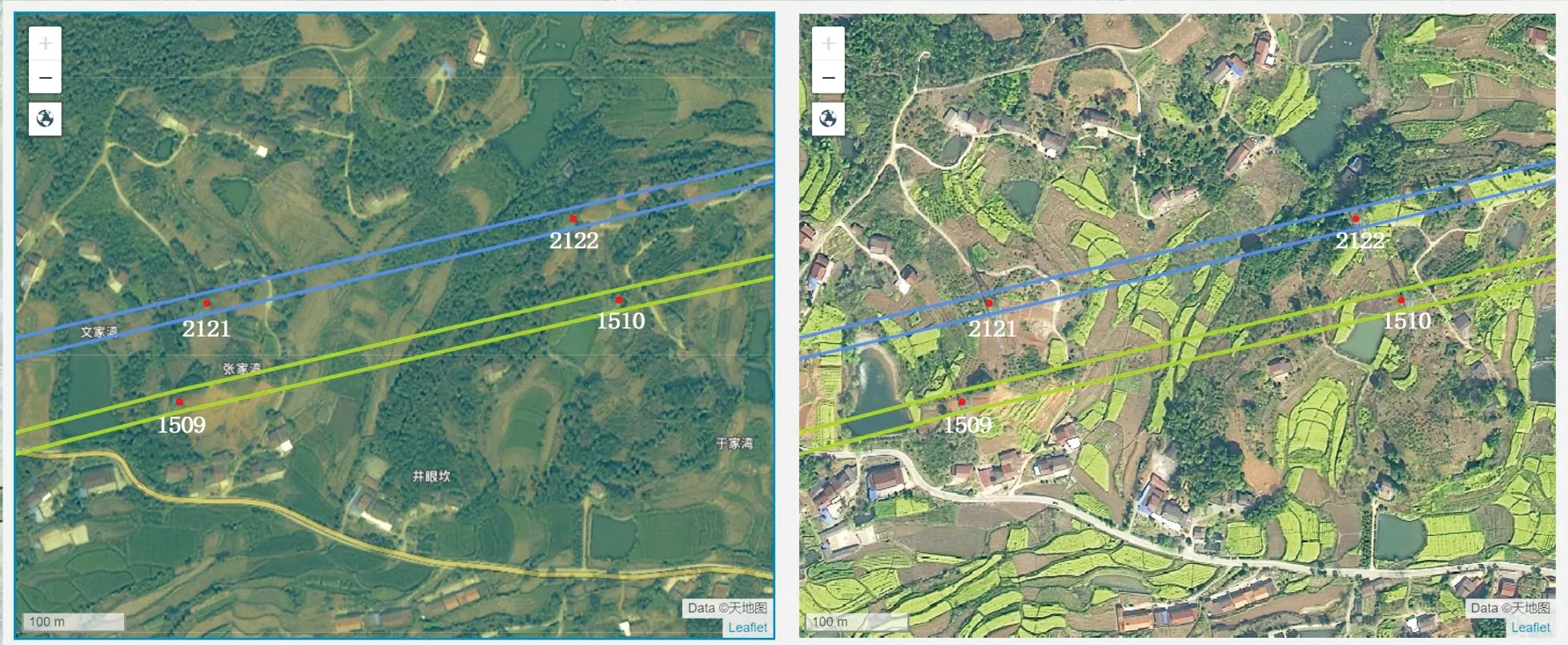
图8 监督分类方法效果Fig.8 Effect of supervised classification method
而在导线空间参数信息计算中,由于数据库内的铁塔空间参数经过了多次校正,因此在采用弧垂计算公式计算导线空间参数时,输电导线在铁塔上的挂点信息可视为准确,误差主要集中在弧垂计算上。由弧垂计算公式(9)可以看出,影响弧垂大小的参量主要为:1)导线的应力σ;2)导线的比载γ。对应力σ而言,影响其变化的主要因素为导线运行温度,温度越高导线弧垂越大,线树距离也就越小。实际导线运行温度受到载流量变化的影响而在某一范围内波动[18],但采用弧垂计算公式进行计算时无法准确得知导线的运行温度,故而造成计算结果的误差;对比载γ而言,在不考虑覆冰影响的情况下,能够使其发生显著变化的主要是风。由于在导线空间参数信息计算时按照气象区条件考虑了风速,而采用无人机进行实地激光点云复测时多要求无风或微风环境,条件的差异从而产生了计算误差。
3.5 小结
通过测量结果对比与误差分析,本文所提出方法的测量精度符合工程预期,且该方法无需携带任何巡检设备对输电线路沿线进行实地测量,能够满足对树障距离常态化、无风险和经济性测量的要求,并能精准分析和定位重点关注区间,可为运检人员提供充足的复测确认及树障风险处置时间。
同时,依托本文方法搭建出了树障预警平台,运检人员结合平台提供的预警信息,合理安排树障复检及处置时间,可做到发现一处树障隐患处置一处树障隐患,实现了对线树距离小于阈值的杆塔区的持续测量和及时预警,有利保障了输电线路的安全可靠运行。
4 结语
本文采用卫星遥感影像,基于摄影测量原理,从立体像对中匹配出空间点云信息并构建了三维立体模型。在此基础上,结合树冠识别和输电线路空间参数的计算,实现了线树距离的测量。
通过与实地激光点云复测结果的对比,采用卫星遥感影像所构建的输电线路通道三维模型(树冠)的高程误差最大10.69%,平均5.26%;线树距离的测量误差最大15.80%,平均为6.09%。
配合重点关注区间(3D)和风险预警区间(2D)的预警策略和预警平台的搭建,能够实现输电线路线树距离的常态化、大范围、高精度、无风险、经济性测量和风险预警,有力保障了输电线路的安全可靠运行。
