变电站无人机智能巡检航迹规划算法的研究与探索
2021-09-23周云雅
李 游,周云雅,彭 聪
(1.国网湖南省电力有限公司 检修公司,湖南 长沙 410004;2.变电智能运检国网湖南省电力有限公司实验室,湖南 长沙 410004)
0 引 言
目前,电力设备检修面临很多问题,如运维和检修周期长,任务工作量大、大多依靠人工,工作效率低以及电力需求量大,技术人员不能及时发现故障信息等[1]。而且在故障发生之前,传统的电机设备运维和检修方法难以对相应的异常情况给予足够的重视,无法及时解决故障问题。
将无人机设备运用到电力设备检修中形成无人机检巡,具有全方位、多角度以及工作效率高的优点,能够解决电力设备巡检存在盲区的问题,从而解决电力故障问题[2]。但是,无人机巡检仍处于初级阶段,无人机在变电站的应用存在许多安全问题和需要解决的技术难题,从而阻碍了无人机巡检在变电站行业的发展[3-5]。为了解决无人机巡检的技术问题,提出复杂环境下变电站无人机智能航迹规划算法和智能巡检模式。
1 项目介绍
1.1 项目背景
2019年8月,公司开展轻型和小型无人机巡检工作,从安全距离、飞行稳定性以及拍摄效果等方面进行了验证,遥信遥控均显示正常,至今未发生巡检炸机事故。2020年,国网湖南检修公司采用500 kV鼎功智慧变电站不断拓展无人机应用领域,开展无人机自主巡检技术前期研究及试点应用,成为全国首例无人机智能巡检案例。2020年10月,湖南公司探索无人机变电站复杂环境下的智能巡航技术,构建“无人机+机器人+人工巡检”相结合的设备巡检体系,降低无人机自主巡检风险,减少了运维人员的工作量。
1.2 项目框架
本项目提出了一种基于移动智能机巢的变电站无人机多机协同智能检测解决方案,无人机智能巡视项目总体框架如图1所示。完成无人机智能巡检过程需要巡检装备、通信设备以及供电设备共同发挥作用,其中巡检装备主要由移动式智慧机巢、无人机、人工智能服务器和照明设备等组成,通信设备主要包含光纤、4G、5G等通信模式,供电设备有220 V交流供电设备和锂电池供电设备两种[6-7]。
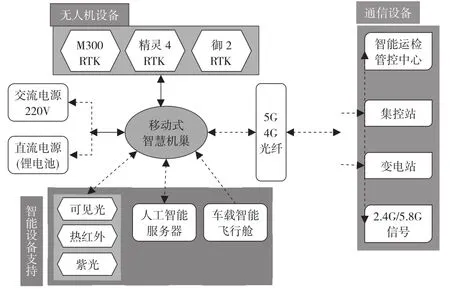
图1 无人机智能巡视项目总体框架
1.3 项目难点
目前,无人机应用于电力设备检修行业仍存在许多安全问题和技术难点,复杂环境下的电磁场不稳定且输电线路复杂,对无人机的正常使用产生不利影响,加大了无人机自主巡检的难度,当务之急是解决无人机巡检的航线问题。
单一算法难以智能规划航迹,不能降低无人机自主巡检的风险。完成本项目的关键是研究变电站复杂环境下智能航迹规划算法模型,以实现无人机智能巡检、智能避障以及及时应对复杂环境变化,解决无人机航迹问题。
2 三维航线智能规划技术研究
无人机巡检路径安全可行的关键是三维航线规划,变电站三维航线规划流程如图2所示,主要由台账关联、点云数据处理以及地图使用3部分组成。

图2 三维航线规划全局处理流程
基于无人机巡检任务智能避障、稳定工作、提供结果准确以及减少运维人员工作量等要求,研究基于台账关联、点云数据处理以及地图使用的三维航线规划技术,依次通过绑定台账、区域划分、加载数据、处理数据、导出数据、道路节点开发和计算应急返航点等关键步骤,合理设置巡检点和辅助点,调整无人机性能参数,实现无人机巡检路径的高效性、可行性、准确性以及安全性等。
3 变电站复杂环境下航线智能规划系统
在变电站复杂环境下开展无人机自主巡检工作需要更高的要求,需进一步提高变电站多旋翼无人机巡检的可靠性、安全性以及准确性。研究变电站无人机巡检航线智能规划系统,该系统的核心是基于激光点云模型的PC端App“智能航线规划”。基于点云模型,分析多旋翼无人机相机参数、最小安全距离以及巡检要求等多方面因素,根据无人机各部件的特点,分别对低空和高空巡检进行航线设计,从而提供高度可行的巡检航线,以供多旋翼无人机自主巡检作业。
基于变电站复杂环境下无人机巡检的要求,提出了变电站复杂环境下航线智能规划系统。变电站航线智能规划主要分为预处理点云数据、制作台账文件、制作App、初始化App以及调整航线5个步骤。其中,制作App由新建工程文件、导入点云文件、导入台账文件3部分组成,初始化App的实现需要索引管理、台账管理、航点管理以及地图管理4部分功能发挥作用,通过删除当前变电站、航点微调、辅助点添加与采用成果服务,实现调整航线功能[8,9]。
4 三维航线智能规划的算法融合研究
4.1 算法流程
4.1.1 单源点最短路线算法
为了节省多旋翼无人机巡检时间,提高工作效率,首先需要解决飞行路径问题,即寻找最短的飞行路线。通过比较两集合内的结点间最短距离,选择最短的飞机路径。但是,在选择最短路径的过程中,需要存储每个结点的最短路径估计,因此该算法的复杂度高、需要的存储空间大,不能单独使用。
4.1.2 动态规划算法
动态规划算法的本质是解决多阶段决策问题,通过由初始状态、中间阶段决策以及结束状态组成的决策序列,确定航线规划最优路径。使用动态规划求解问题的关键是确定动态规划三要素,即问题的阶段、每个阶段的状态及前后两个阶段之间的递推关系。确定了三要素之后,将决策阶段与问题状态相对应,根据递推关系,求得整个问题的最优解。
运用动态规划算法解决智能航线问题需要通过以下几个步骤来实现。一是分析最优解的性质,描述最优解的结构特征。二是通过递归方法定义最优解。三是通过备忘录法计算最优值,即自下而上或者自上而下的记忆化方式。四是根据计算最优值时或缺的信息,构造问题的最优解。
动态规划算法在解决智能航线规划问题上具有一定的优势,能够以简便的方法计算出最优值,确定最优路线,但是在理论设计上具有难点,需要将该算法与其他算法结合降低理论设计的难度。
4.1.3 A*算法
A*算法解决智能航线规划问题的关键是计算每个节点的优先级,在运算过程中,将优先级最高的节点作为下一个待遍历的节点,计算节点优先级的公式为:

式中:f(n)表示节点n的综合优先级,优先级越高,值越小;g(n)表示节点n距离起点的代价;h(n)表示节点n距离终点的预计代价,即A*算法的启发函数。
启发函数在控制A*算法的精度和速度上发挥着重要的作用,同时能够采用曼哈顿距离或者对角距离解决指定路线上的距离问题。
4.2 智能巡检模型设计
在变电站复杂环境下,无人机自主巡检存在一定的风险,在选择最优路径的同时要满足变电站的巡检要求和电力设备的安全距离标准,融合单源点最短路径算法、动态规划算法以及A*算法形成智能航线规划算法模型,进行智能巡航模式设计。通过采集各变电站的光点云数据,构建点云模型,根据巡检要求和安全因素,智能选择全方位、立体化的最佳路径[10-13]。
5 结 论
传统电力设备检修方式操作危险、存在安全隐患,工作人员手动对无人机进行操控的方法因人而异,主观因素对巡检结果产生较大干扰,限制了无人机的应用。而无人机自主巡检在电力设备检修中具有极大地优势,不仅降低了操作的危险性,还提高了工作效率。实现无人机自主巡检的关键是选择最佳的航迹,最佳航迹的选择取决于智能航线规划算法。
基于前人对无人机自主巡检算法模型的研究,单一航迹规划算法难以规划出最佳航迹,因此融合单源点最短路径算法、动态规划算法以及A*算法,提出一种智能航线规划模型。根据各变电站、电力设备、无人机自身条件和巡检部件的要求,智能航线规划模式选择最佳的航迹,以提高变电站复杂环境下多旋翼无人机自主巡检的效率和稳定性。
