半轮足式机器人的设计及研究
2021-09-23李君科
李君科
(桂林电子科技大学,广西 桂林 541000)
0 引 言
在频发的自然灾害下,人类迫切希望收集灾区相关信息、救助被困人员以及对事故进行评估和防范。这些事故都有共同的特征,即非规整地形,人类很难或根本进不到这样的环境中。因此,迫切需要一种适应于上述环境下的移动设备以达到相应的目的。为此,研究者和学者进行了大量的研究,各种类型的设备被陆续提出。而越障机器人作为其中的重要组成部分,得到了前所未有的重视,其不仅具有较强的地形适应性和越障能力,还能保持一定的移动速度。将越障机器人应用在上述环境中为人们服务,那么将会有巨大的社会效益和经济效益。基于此,非规整地形行走的越障机器人日益得到了国内外众多研究人员和社会的重视,成为移动机器人领域的一个充满活力、具有挑战性的前沿发展方向。
1 相关工作
对于越障机器人,典型的有文献[1]以Mecanum轮为基础设计了轮腿式的机器人以提高登台越障运动的能力。文献[2]设计了一种可变形的轮子机构,使得机器人越障能力得到提高。文献[3]采用六轮越障形式,通过独立驱动差速转向的方式实现了全地形机器人。文献[4]对双摇臂履带式矿山机器人结构进行了优化,利用GA⁃PSO算法对单目标优化问题进行求解,得到机器人最优结构参数。为了减少震动以及提高越障稳定性,文献[5]通过RPY变换,建立坐标系以获得煤矿救援机器人的质心信息,进而分析机器人运动特性以得到机器人最大越障能力。在轮腿越障研究方面,文献[6]对八足腿结构机器人进行设计与越障的仿真,验证了八足腿结构机器人具有良好的越障能力。文献[7⁃9]对仿生六足机器人进行研究,设计越障机构,实现控制系统,研究步态控制,分析越障能力。
目前,使用步态进行运动的机器人中使用最多的为三角步态[7⁃11]或三角步态的衍生步态[12⁃13],这种步态能够保证机器人机体的稳定性[9,12]。文献[7⁃10]是使用仿生步态方式使机器人进行运动的典型代表。文献[9]分析了仿蟹机器人的稳定性及功耗。文献[8⁃10]利用三角步态对六足机器人进行了运动控制,使机器人表现出了良好的运动性。综上,使用轮腿方式使机器人行走和越障,在越障中使用类三角步态行走。在规整地形中使用轮式方式进行行走。使用三角步态不仅能够使得机器人更好的运动,也可以保证机器人的稳定性,但其存在一个明显的不足就是使用这个步态在负重的情况下越障效果不理想。而工作在灾害环境下的机器人要担负一定的设备或仪器来完成任务,因此对使用特定越障机构的机器人在灾害环境下的步态规划及运动控制成为一个亟需解决的问题。
2 半轮足越障机器人的设计
本文提出以半轮足式越障机构为基础构建的半轮足式机器人。首先,在工作环境、越障能力和运动效率等指标的约束下提出半轮足越障机构并以此为基础构建半轮足式越障机器人,根据半轮足式越障情况确定了六足全半轮足式越障机器人以及六足前后半轮足式越障机器人,如图1所示。其次,针对冗余设计的六足半轮足式越障机器人依据越障条件和负重性因素提出前后足交替步态以及前足交替步态。最后,分析了步态的稳定性并确定机器人的参数,在此基础上设计了配合步态运动的控制电路。

图1 六足全半轮足机器人及六足前后半轮足机器人
图2展示了六足机器人的控制电路图。其中,控制器为两块AT89C52,一块用于控制电机工作,另一块负责接收红外控制信号,如图2右下端所示,红外接收器为SM0038。图2中,M1~M6为机器人马达,用于驱动机器人的半轮足。其驱动芯片为L298N,由于一块L298N芯片可以驱动2个电机,因此驱动六足需3块L298N芯片可以完成6个电机的驱动。为了隔离L298N芯片和AT89C52控制器的信号之间的干扰,采用广电耦合器进行信号隔离,单片机的每个控制引脚和L298N控制器的输入信号之间设置了光耦隔离,如图2中的OPS01到OPS12。为了更好地检测到半轮腿的状态,采用安装在机体上的一体化反射型光电探测器RPR220,在半轮腿上对应位置上贴有缩小的和半轮足形状相同的黑白相间的信号反射源。为了更好地采集信号,采用了LM339电压比较器,如图2右上角所示。为了更好地获取机器人的状态,采用了串口的方式收集机器人的状态信息,如图2左上角所示。
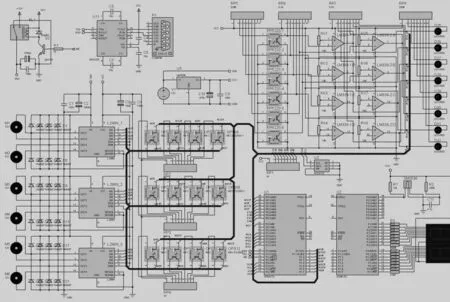
图2 六足机器人控制电路图
3 半轮足机器人的步态控制及其稳定性分析
依据提出的半轮足越障机构建立两类半轮足越障机器人,分别为六足全半轮足机器人和六足前后半轮足机器人。在此基础上,针对典型的三角步态的负重面不足的问题对半轮足机器人进行了步态研究,提出了六足前后半轮足机器人的前后足交替步态,如图3所示。在图3中,L1,L2及L3表示机器人左侧从上到下编号为1,2和3的轮足;R1,R2及R3表示机器人右侧从上到下编号为1,2和3的轮足。步态中的黑色区域表示机器人当前轮足是支撑态,而白色区域则表示为腾空态。图3中,由于采用的是前后半轮结构,因此左右两侧位于中间的轮足是标准的圆足。其行走按如下规则进行,L1和R1为一组,L3和R3为一组,相互在腾空态和支撑态交替,以此完成机器人的行走。全半轮足机器人的四足交替步态如图4所示。其中,L1和R2为一组,R1和L3为一组,L2和R3为一组。其行走规则如下,在两组为支撑态时,第三组为腾空态。当切换为下一状态时,支撑态中的一组保持,另一组则配合第3组切换为支撑态,以此循环往复。前后半轮足机器人四足交替步态如图5所示,与前后半轮足机器人的前后足交替步态类似,再次不再赘述。全半轮机器人五足步态如图6所示。其行走规则如下:每一个轮足都为一组,在当前时刻,总有5个足处于支撑状态,第6个处于腾空态。

图3 前后半轮足机器人的前后足交替步态

图4 全半轮足机器人的四足交替步态

图5 前后半轮足机器人四足交替步态
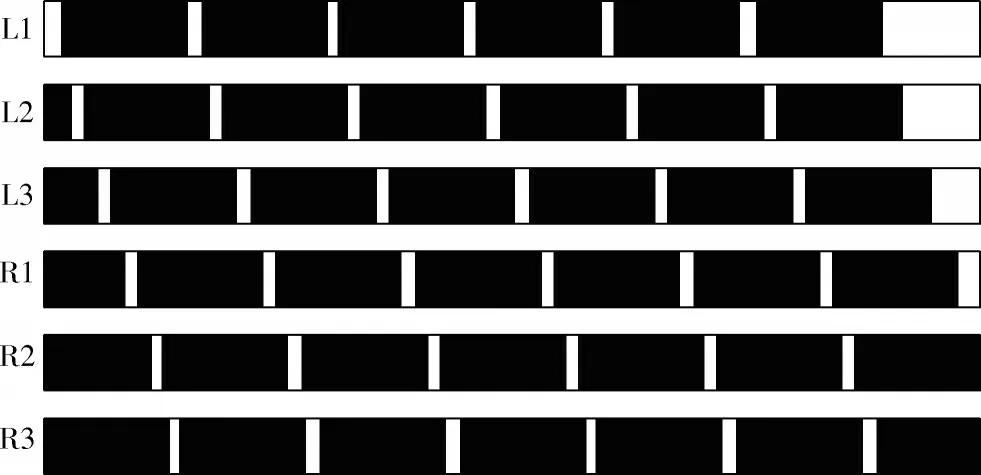
图6 全半轮机器人五足步态
其次,对步态进行了稳定性分析,采用了重心投影法选取了典型的四足步态进行了分析,如图7所示。根据静态稳定裕度法,重心投影到支撑边的距离最小值为静态稳定步行的稳定裕度。设稳定裕度为Sssm,则Sssm=min(PF,PR,PE)。由图7可以看出,当机器人处于该状态时为其行走的极限状态。此时PF是最小的,如果点F(xF,yF)的yF值小于0,则机器人的重心落在ABDC区域内,此时机器人的步态是稳定的。此时yF为:
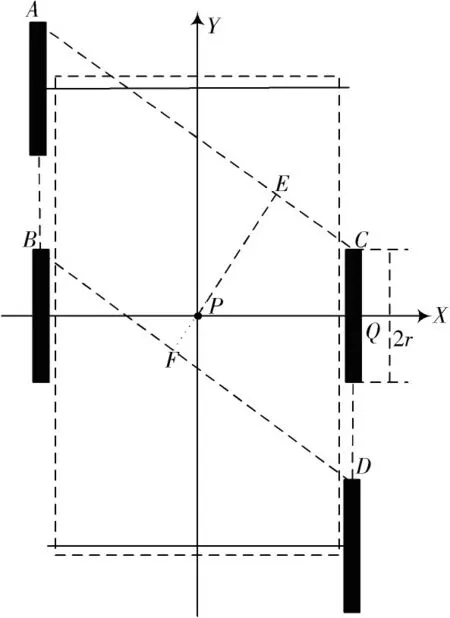
图7 四足步态的稳定性分析

而B点和D点的坐标分别为:

式中:m为机体横向长度;l为机体纵向长度。
将式(2)代入式(1)得:

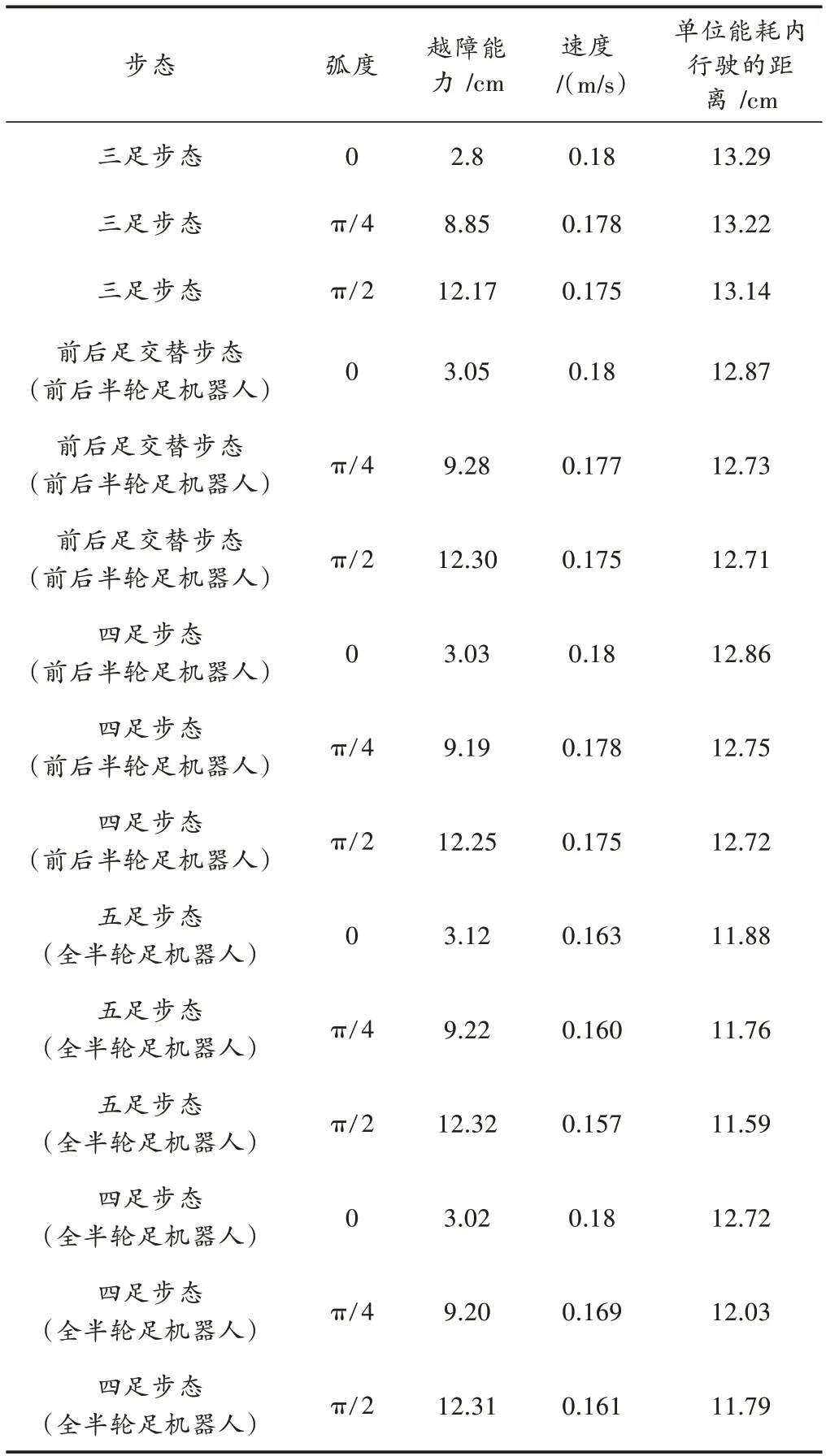
而在机器人机体设计中,机体纵向长度大于3个轮子直径,即6r 图8 负重物放置范围分析 对于机器人的越障能力的分析,采用理论分析和实践结合,以及静态和动态分析相结合的方式。单个半轮足的越障能力静态分析中,其理想越障高度L与所缺弧度W有关,它们之间的关系如下: 在六足机器人整体越障能力分析中,其理想越障高度L除所缺弧度W有关外,还与机体驱动力F以及越障系数γ有关,它们之间的关系如下: 针对上述提出的前后半轮足机器人的前后足交替步态、前后半轮足机器人四足交替步态、全半轮足机器人的四足交替步态以及全半轮机器人五足步态,通过实验验证步态、弧度与越障能力之间的关系,如表1所示。由表中的弧度和越障能力之间的关系可以看出,无论采用任何步态,弧度越大则越障能力越强,最大的越障能力对应的弧度为π2。对比典型的三足步态,前后半轮足机器人采用的前后足交替步态及四足步态,在越障能力上弧度为π2时分别提高了0.13 cm和0.8 cm;在弧度为0和π4时也有所提高,主要在于弧度为0时,有多个电机驱动产生了较三足步态更多的驱动力而使越障能力得到提高。同样,效果也反映在全半轮足机器人中的四足步态和五足步态上。对比五足步态和四足步态,可以看出五足步态在越障能力上要比四足步态有一定的优势,但是其是以损失速度和单位能耗内行驶的距离为代价的。综上所述,步态和弧度影响越障能力;步态中驱动力越大,越障能力越优;弧度越大(最大为π2),越障能力越优。 表1 步态、弧度与越障能力之间的关系 针对当前越障机构存在的问题,本文提出半轮足机器人并对其展开研究,分析其越障能力,设计其对应的步态并实现了对应步态的控制。最后对步态及其对应的越障能力进行了实验,实验结果表明,本文设计的越障步态验证了提出的越障机构具有一定的越障能力且验证了步态和弧度影响越障能力;步态中驱动力越大,越障能力越优;弧度越大(最大为π2),越障能力越优。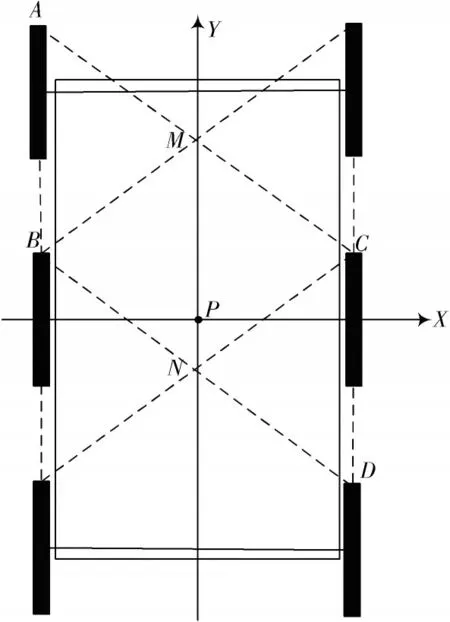


4 实验结果及分析
5 结 语
