一类植物-草食动物扩散系统的动力学分析
2021-09-22麻晓琦赵治涛
麻晓琦, 赵治涛
(黑龙江大学 数学科学学院, 哈尔滨 150080)
0 引 言
捕食模型在构建生物群落、 促进物种进化以及保护生物多样性等方面具有重要作用, 目前已得到广泛关注[1-5]. 经典的捕食者-食饵模型中, 食饵多以Logistic形式增长, 但自然界中的一些食饵并不符合上述规律, 如植物经常表现出抗食草性, 植物的根部不容易被捕食, 或者种子不能被消化等. 于是, 一些研究者提出了食饵具有抗食草性的捕食模型[6-13], 即食饵增长时, 总有一部分不能被捕食者捕食, 该部分仍能继续生长成完整植株. 这种防御机制更符合实际.
植物与草食动物之间的相互作用是生态学、 进化生物学和资源管理等领域的研究热点. Feng等[6]认为植物可通过补偿性再生长恢复被草食动物损失的生物量, 进而提出利用可食用和可被草食动物获取的生物量进行建模, 分析植物-草食动物群落的种群变化; Agrawal[7]研究了植物具有防御性时对环境的适应能力及其未来的进化趋势, 进而影响系统的生物多样性; Nalam等[8]指出因为植物地下生物量(种子, 根部)可很快地再生成完整植株, 因此根作为合成防御化合物的主体, 发挥着抗草食动物的作用; Mortensen等[9]指出了Logistic模型的不足, 并提出将再生模型和Logistic模型相结合, 考虑植物种间竞争因素对种群的影响.
本文考虑如下一类再生模型和Logistic模型相结合的植物-草食动物扩散系统的动力学性质:

(1)
其中N表示植物在地表上的生物量,P表示草食动物的生物量,R表示植物在地表下的生物量或根部,r表示植物的内禀增长率,a表示草食动物的捕食率,K表示环境最大容量,c表示草食动物的营养转换效率,d表示草食动物的死亡率,d1,d2分别表示植物和草食动物的扩散系数,n为边界∂Ω上的单位外法向量,α和β为正常数. 首先, 讨论系统(1)解的长时间性质, 包括解的全局存在性、 耗散性和持续性; 其次, 分析系统(1)常值稳态解的存在性、 局部渐近稳定性和全局渐近稳定性, 并给出系统(1)图灵不稳定的判别准则; 最后, 通过数值模拟验证所得结果的有效性.
1 解的长时间性质
下面讨论系统(1)解的长时间性质, 包括解的全局存在性、 耗散性和持续生存.

证明: 首先, 注意到系统(1)在区域{N≥0,P≥0}上是一个混拟单调系统.令


(2)


定理2设(N(x,t),P(x,t))是系统(1)的任意解, 则有

(3)

(4)

证明: 因为N(x,t)满足
设z(t)是下列初值问题

再由ε的任意性可得

同理, 可得

因此式(4)成立.证毕.


(5)

(6)
即系统(1)是持续生存的.
证明: 由系统(1)的第一个方程, 有
设w(t)是初值问题
的唯一正解.因为(ca-dα)(rβ-a)K>rβd, 所以存在充分小的ε>0, 使得

2 常值稳态解的存在性与稳定性
系统(1)的常值稳态解有E1=(K,0)和E2=(N*,P*), 其中(N*,P*)满足
经简单计算可得
令
易得

因此当d<(ca-dα)N*时, 系统(1)有唯一的正常值稳态解.
设算子-Δ在Ω上具有齐次Neumann边界条件的特征值为
μi∈Λ≜{μi: 0=μ0<μ1<…<μi<…,i∈}.
设S(μi)是特征值μi对应的特征子空间,m(μi)是特征值μi的重数, {φij|1≤j≤m(μi)}是S(μi)的一组标准正交基.记
则
其中(φ,ψ)∈X, 且

λ2-Tiλ+Di=0,i∈
的解, 其中
Ti=-μi(d1+d2)+a11+a22,

首先, 考虑常值稳态解E1=(K,0)的稳定性.

证明: 通过简单计算可得
于是, 系统(1)在E1处线性化系统对应的特征方程为


其次, 讨论常值稳态解E2=(N*,P*)的稳定性.

证明: 由d<(ca-dα)N*可知E2存在.经简单计算有
其中
于是, 系统(1)在E2处线性化系统对应的特征方程为
λ2-Tiλ+Di=0,i∈,
其中



(7)
则E2是局部渐近稳定的.


成立, 则有
表明对任意的i∈, 均有Di>0.又因为
于是当式(7)成立时, 对任意的i∈, 均有Di>0.因此E2是局部渐近稳定的.证毕.
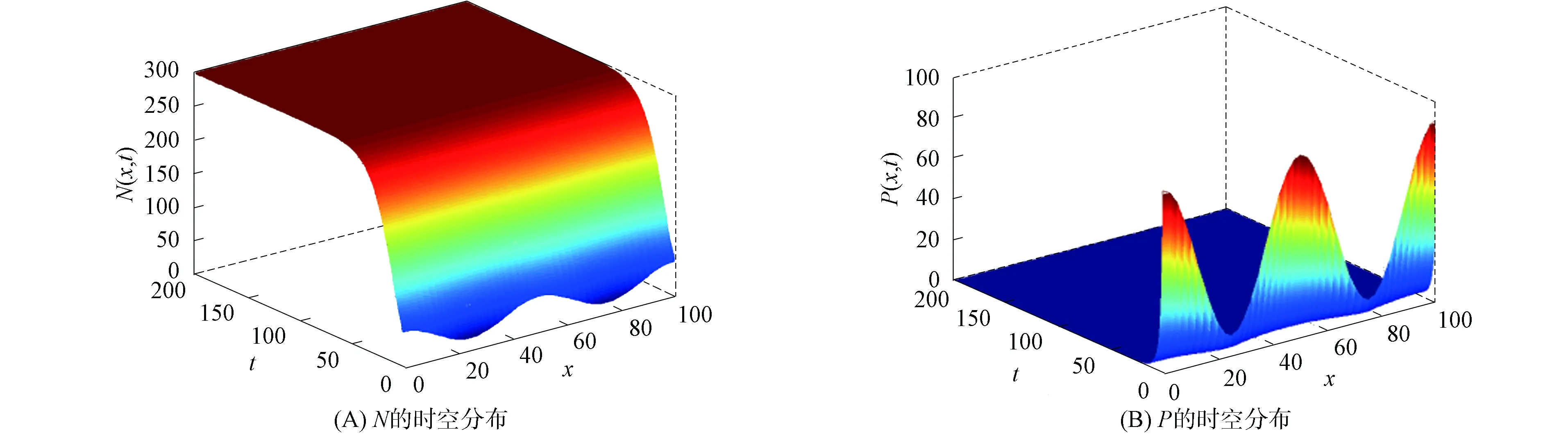
定理7设d<(ca-dα)N*, 如果(caαK-dα2K-rcβ)N* 证明: 定义Lyapunov函数为 沿系统(1)的解(N(x,t),P(x,t))计算其导数, 可得 其中 注意到(P-P*)2的系数小于0, (N-N*)2的系数满足 最后, 考虑系统(1)在常值稳态解(N*,P*)处的图灵不稳定性[14].图灵不稳定性也称为扩散驱动不稳定性, 是指在无扩散作用时系统稳定, 但在扩散作用下当满足某些条件时系统不稳定, 从而导致非均匀的空间分布. (8) 成立, 则方程 有两个正根: 3) 对固定的d2>0, 存在d*>0, 使得当0 证明: 1)和2)显然成立. 3) 对固定的d2>0, 有 下面利用MATLAB进行数值模拟, 以验证本文所得常值稳态解的相关结果.固定R=10,K=300,r=0.06,a=0.033,c=0.8,α=0.06,β=0.4,d1=1,d2=1.取d=0.5, 则 于是定理4的条件成立.图1为边界稳态解E1的分布.由图1可见, 常值稳态解E1=(300,0)是全局渐近稳定的, 表明定理4成立.取d=0.4, 则 (ca-dα)N*=0.695 7, (caαK-dα2K-rcβ)N*=6.957 1,dαK=7.200 0, 于是定理7的条件成立.图2为正常值稳态解E2的分布.由图2可见, 常值稳态解E2=(289.879 5,1.848 2)是全局渐近稳定的, 即定理7成立. 图1 边界稳态解E1Fig.1 Boundary steady state solution E1 取R=2,K=6 000,r=0.6,a=0.033,c=0.8,α=0.05,β=0.03,d1=0.01,d2=10, 则 于是定理8的条件成立.图3为正非常值稳态解的分布.同理由图3可见, 定理8成立. 图3 正非常值稳态解Fig.3 Positive nonconstant steady state solution




3 数值模拟