机器学习在预测人体运动地面反作用力中的应用综述
2021-09-20李翰君
冯 茹,杨 辰,李翰君,刘 卉
(1.北京体育大学运动人体科学学院,北京 100084;2.南京体育学院运动健康学院,南京 210014;3.北京体育大学中国运动与健康研究院,北京 100084)
引 言
三维地面反作用力(Ground reaction force,GRF)在人体运动分析中非常重要,用以分析人体与地面的相互作用,并通过逆动力学估计关节动力学[1]。跑步中的GRF 垂直分量过大可以用来预测跑者膝关节损伤的发生风险[2],步行中的GRF 可以用于评估跌倒风险和异常步态[3‑4]。作为人体下肢最远端环节的外力,GRF 可用于计算连续的关节动力学,从而得到人体各环节的力、力矩等信息[5]。力在不同的动作任务中用来量化肌肉骨骼负荷,作为损伤风险的量化参数[6]。力矩也是反映动作中肌肉力大小的常用参数,为研究人体运动机制提供了重要的信息[7]。
三维测力台是测量GRF 的黄金标准,然而其成本较高,且具有一定的实践难度[8]。测力台应固定于地下并与地面水平,以准确测量GRF,这使得动作测试时的场地受到一定限制。为了测量使用测力台测量运动任务中的各个阶段,需采用多个测力台同时需调整被测者的动作,已有研究观察到实验室环境与户外环境的动力学差异[9‑10]。可穿戴的压力鞋垫被用来测量足底的动力学数据,其成本和应用场景都优于三维测力台。有研究表明,将4 到8 个压力传感器放置于足底特定解剖区域,可较为精确地预测跑步中的垂直GRF[11]。而压力鞋垫所测得的动力学数据只包括垂直分量,鞋垫的厚度和大小也受到一定限制,其结构和材料性能也会对不同结构的足部受力模式产生显著影响[12]。
各类计算方法被用来预测GRF,但其预测能力都具有一定的局限性。Audu 等[13]使用平衡优化技术预测了不同静态姿势下的两侧足的GRF,然而,由于结果来自有限的静态姿势,因此该方法不适用于动态运动;Bobbert 等[14]建立了下肢髋膝踝三维角度与垂直GRF 的相关函数以预测跑步中的垂直GRF;Ren 等[15]提出了构建线性传递关系模型来计算步行双支撑时相的GRF,但其结果仅限于垂直方向力;相关性分析被用来利用单个加速度计来预测跳跃和落地动作的峰值力,但不能获得全时间序列的动力学信息,因此限制了全运动阶段评估动力学的可能性[16];Fong 等[17]将5 名受试者步行中压力鞋垫所采集的足底压力数据进行逐步线性回归,来预测完整的三维GRF。
随着机器学习和数据科学的发展,通过机器学习模型预测运动中的GRF 已成为可能。机器学习模型是一种灵活的非线性建模工具,需要一定量的训练数据来进行预测。神经网络模型已被证明是在步态动力学预测中一种有效的学习模型[18]。 Sim 等[19]使用小波神经网络(Wavelet neural network,WNN)和主成分分析构建了根据压力鞋垫测得的人体加速度测得的足底压力来预测步行中三维GRF的模型;Ngoh 等[16]使用前馈神经网络构建了根据单加速度计测得的人体加速度预测跑步中垂直GRF的模型;Seung 等[18]使用人工神经网络(Artificial neural networks,ANN)构建了利用全身标记轨迹集预测步行中的两足三维GRF 的神经网络模型,也是最早预测步行中三维GRF 的研究。近两年来,机器学习技术还越来越多地应用在生物力学领域。
本文为综述性研究,根据PubMed、Web of Science 和Elsevier 数据库中已发表的文献,系统归纳机器学习在预测人体运动GRF 中的应用现状。提取当前研究中已采用的机器学习模型、运动任务和GRF 预测方案等信息,对未来无测力台下获取人体运动中的GRF 提供可行性方案。同时总结当前研究中的局限性并展望机器学习在GRF 测量中的应用前景,为后续应用提供方向和参考。
1 文献检索方法
以“ground reaction force”与“machine learning”“neural network”组合为关键词在PubMed、Web of science 及Elsevier 数据库中检索,检索时间从1960年1 月到2020年12 月。
文献纳入标准:(1)全文以中文或英文撰写;(2)研究包括明确的运动任务;(3)研究应用了机器学习模型;(4)机器学习的输出参数包括GRF 参数;(5)研究评估了模型的学习效果。并使用以下排除标准进行进一步筛选:(1)运动主体是动物或器械;(2)全文为会议性文章。
根据选取文献的方法和结果提取信息。从每篇文献中提取的信息包括:动作任务类型、机器学习模型类型、学习的样本集大小、输入参数、输出参数,训练集验证集比例及模型的评价指标。
2 文献检索结果
以“ground reaction force”和“machine learning”以及“ground reaction force”和“neural network”为关键词组合在PubMed、Web of science 及Elsevier 数据库中搜索,共搜索到228 篇文献。去重82 篇,根据纳入标准和排除标准,最后筛选出14 篇文献纳入本研究,筛选流程如图1 所示。

图1 文献筛选流程Fig.1 Search strategy and literature screening
表1 依次列出了纳入本研究的14 篇文献的动作任务、机器学习模型类型、输入参数、输出参数、数据集大小、训练集验证集比例及模型评价选取的指标。
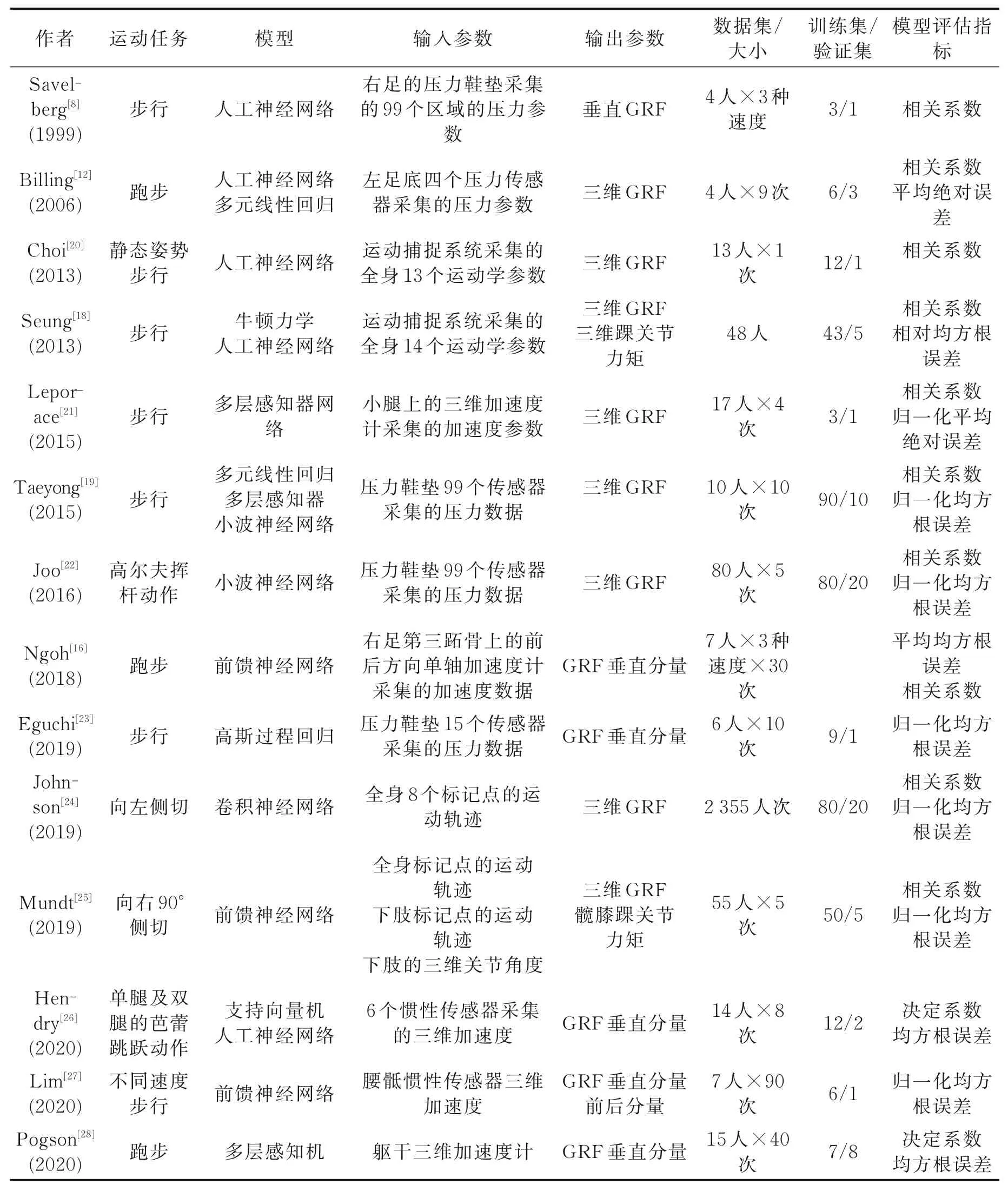
表1 预测GRF 的机器学习模型的方案Table 1 Projects of machine learning model for predicting GRF
1999年出现了对应用机器学习算法预测人体动作中GRF 的最早研究,而近两年来的相关研究数量大大增加。研究探究了不同运动任务中的GRF,其中7 篇分析了步行动作、3 篇分析了跑步动作、1 篇分析了不同静态姿势,2 篇分析了专项技术动作(高尔夫挥杆动作和芭蕾跳跃动作),2 篇分析了运动中的侧切任务。
不同的机器学习模型也被用于该类研究中,其中5 篇文献应用了一般人工神经网络,3 篇应用了多层感知机网络,2 篇应用了小波神经网络,3 篇应用了前馈神经网络,2 篇应用了多元线性回归算法,1 篇应用了局部线性神经模糊算法,1 篇应用了高斯过程回归,卷积神经网络也在1 篇文献中被应用。
各机器学习模型的输入参数选择不同,5 篇文献以压力传感器测得的足底压力信息作为模型的输入参数,5 篇文献以放置于人体上的惯性传感器或加速度计所采集的信息作为输入,4 篇文献应用运动捕捉系统获取的人体运动学信息作为输入。其中所有研究都预测了全时间序列的GRF,8 项研究预测了三维GRF,5 项研究仅预测了GRF 的垂直方向分量,另有两项研究预测了下肢关节的三维力矩。
用于构建机器学习模型的数据集大小在各研究中也不相同,从最早研究的12 人次的数据集到2019年1 篇研究中的2 355 人次的数据集。纳入本文研究中用于机器学习模型构建的数据集大部分都较小,仅有一项研究的数据集包含了超1 000 人次的数据,相对于其他类研究的机器学习模型,数据集较小。数据集中用于验证的验证集所占比例也在各研究中不同,大部分研究的训练集/验证集比例在70/30 到90/30 之间。所有的机器学习模型的预测性能都采用了预测值与真实值之间的相关系数来评价,除此之外,归一化平均绝对误差和归一化均方根误差也被用于模型评价中。
3 分 析
机器学习(Machine learning)自20 世纪被提出后,已经被包括机器人、遗传学和经济学在内的各个学科所采用,并且越来越多地应用于生物力学领域[29]。由于生物力学数据收集和数据处理的复杂性,计算机在运动动作的模拟和数据优化中也起着重要的作用,Yeadon 等[30]则提出与运动性能相关的生物力学研究的重大进展将需要更加创新的方法。本文分析了机器学习在预测GRF 中的应用现状及当前存在的问题,旨在为后续机器学习在生物力学中的应用提供方案参考及研究方向。
3.1 预测GRF 学习模型的构建
机器学习的流程包括使用大量和任务相关的数据集来训练模型;通过模型在数据集上的误差不断迭代训练模型,得到对数据集拟合合理的模型;将训练调整好的模型应用到真实场景中[31]。一个构建预测GRF 学习模型的过程包括输入参数、输出参数及学习算法的选择。
在14 篇被纳入本研究的文献中,不同的机器学习算法被应用于GRF 预测中。ANN 是预测GRF 最早使用的神经网络模型[8,12,18,20]。然而早期的人工神经网络可能忽略了局部数据结构[32],并且由于初始权重是随机的,其训练过程缓慢[19],因此更多的机器学习模型被用于预测GRF 中。后续预测GRF 的研究中所采用的多层感知器、卷积神经网络和前馈神经网络实际上都属于人工神经网络[33]。多层感知器(Multilayer perceptron,MLP)是现在最常用的人工神经网络,具有运算速度快、易于实现、训练集要求小等特点[34];卷积神经网络(Convolutional neural networks,CNN)常用于图像处理,应用该模型进行GRF 预测时需预先将输入的运动学参数处理为图像信息[24];多元线性回归(Multiple linear regression ,MLR)是一种利用一个因变量和多个自变量之间线性关系进行建模的方法,也被用于预测GRF 中;WNN 是利用小波函数的正交分解和多分辨率来映射输入和输出之间的非线性关系[22],具有时域的局部化特性和较强的非线性逼近能力;局部线性神经模糊模型(Locally linear neuro fuzzy model)基于神经网络和模糊集理论,可以有效降低计算成本。
有多项研究对比了各机器学习模型预测GRF 的能力。在以压力鞋垫的压力传感器预测步行中三维GRF 的研究中,WNN 被证明相对于MLR、MLP 和局部线性神经模糊模型,具有更优的预测性能[19]。相对于人工神经网络,WNN 在高尔夫的三维GRF 中也表现出了更好的预测能力[22]。神经网络模型在变量关系建模中的应用通常被认为比传统的分析方法更合理,然而在基于足底压力传感器预测三维GRF 的研究中,MLR 在预测GRF 的垂直分量和内外侧分量方面优于ANN,而ANN 模型在预测GRF前后分量获得了更好的效果[12]。
在不同的应用中选择合适的机器学习算法较为复杂,输入参数特征、输出参数特征和训练集的大小等因素都会影响算法的选择。目前GRF 预测模型中的输入参数主要包括:可穿戴式压力传感器测得的力学数据、惯性传感器测得的运动学数据和影像学测得的运动学数据。早期研究多集中在前两类可穿戴测量设备,其优点是成本低、操作简便,但压力传感器不适用于裸足完成的运动[21],且有研究者提出可穿戴设备的建模往往只适用于特定的简单运动(如步态)或者更倾向于预测GRF 的垂直分量[24]。低成本的测量设备测量误差也较大,会降低神经网络模型的性能[23]。通过提供更全面的输入参数可以提高模型的预测精度,并将影像学获得的人体运动学参数用于模型建立中。Billing 等[12]结合足底压力传感器与惯性传感器来提高GRF 预测精度。Mundt 等[25]选取了全身标记点轨迹、下肢标记点轨迹和下肢关节角度作为不同的输入参数来预测GRF 及关节力矩,并观察到利用标记轨迹预测GRF 的精度更高,而利用关节角度,下肢关节力矩的预测精度更高。也有研究认为在人体运动学分析中所得到的关节角度、身体姿态参数的误差比关节旋转中心的位置、运动标记轨迹的误差要大,因此用于神经网络的输入变量应选取关节中心运动轨迹、速度和加速度的原始数据[18]。
GRF 包含3 个分量,对于三维GRF 的预测,各学习模型将会被执行3 次,且各分量在同一模型中的预测效果也不同。在基于全身运动学参数预测三维GRF 的研究中,预测GRF 垂直分量的相关性最高,而前后分量的相关性最低[20],而与垂直分量相比,前后分量和左右分量的相对均方根误差更小[12,20]。
3.2 GRF 学习模型预测效果的评价与优化
GRF 的预测模型为回归模型,目前的研究中多采用平均绝对误差(Mean absolute deviation,MAD)、归一化平均绝对误差(MAD%)、均方根误差(Root mean square error,RMSE)、相对均方根误差(Relative RMSE)及相关系数(Cross‑correlation coefficient)。相关系数是最常用的神经网络模型的评价指标,在参数预测中代表预测值与实际值的时间相似性,但不能反映大小差异。而平均绝对误差和均方根误差代表了预测值与实际值的空间相似性[12],该值在接近0 时具有较强的估计能力,具有较好的预测精度[35]。
由于各研究中都构建了不同输入参数和不同输出参数的多个学习模型,其模型评估结果较为复杂,因此在表1 中并未完整列出各模型的评价结果。在本文筛选出的14 篇研究中,利用神经网络模型都获得较高的预测值与真实值的相关系数,Seung[18]的人工神经网络模型的相关系数在0.91 到0.99 之间。Johnson 等[24]得到了高达0.97~0.98 相关系数的卷积神经网络模型,通过单一躯干的加速度计也在跑步中垂直GRF 的预测性能上达到了大于0.9 的相关系数[28]。各研究的高相关系数证明了机器学习在预测GRF 中的可行性。
训练神经网络需要大量的数据,用于训练的数据越多,神经网络的预测效果就越好[16],用包含更大范围信息的数据集训练的网络比用小范围信息训练的网络能更好地映射关系[8]。在Johnson 等[24]的研究前,GRF 机器学习模型都仅限于小样本,该研究采用西澳大利亚大学生物力学实验室从2001 到2017年的433 186 条数据筛选出的2 355 个左侧切动作数据作为数据集构建了卷积神经网络模型。可能与生物力学数据的获取难度有关,单个实验室包含的数据集大小受到一定的限制。机器学习方法必须基于大量样本的数据,虽然世界各地的生物力学实验室和诊所都有大量运动学动力学的数据,但数据共享还远远不够。数据共享可以让研究者们获得更多更全面的数据集,从而推进机器学习在生物力学中的发展。研究人员已经开始在Simtk.org 以及ODHSI.org 和CrowdSignals.io 等平台上公开分享生物力学数据,未来研究中可利用共享数据构建更全面的机器学习模型[36]。
3.3 机器学习在预测GRF 中的局限性及应用前景
目前机器学习在生物力学的应用包括不同动作模式的分类、神经肌肉疾病的鉴别诊断[37]、运动成绩的预测及测量方法的改进[38]。本研究讨论的预测地面反作用力即为机器学习对生物力学测量技术的改进。
人体运动学分析包含大量的动作任务,但目前仅有步行、跑步、侧切等动作任务被用于研究中,并没有基于人体运动学输入预测多种动作任务中GRF 的研究,这就限制了机器学习在人体动作中的广泛应用。
大部分研究只选取了某一类人群,然而由于性别、年龄和身体素质等因素,不同人群的输入参数分布并不一致,如中风、糖尿病等人群的异常步态可能不在正常人构成的步态训练集内,因此正常人所得到的学习模型不能用于该类人群中[19]。在未来的研究中,应增加训练集样本的多样性,不同人群和不同运动模式都应被纳入到学习模型中。
在实验室测量中,动力学数据内测力台采集,可直接测量人与地面间的作用力,包括三维力及压力中心位置。目前的研究都仅限于三维GRF,仅两项研究对下肢关节的三维力矩也进行了预测。完整的测力台信息应包括三维GRF 及压力中心,且仅当GRF 的数据完整输入后,才可以进行逆动力学的解释,因此有必要对压力中心参数数据构建预测模型[18,20]。
当前预测GRF 模型的输入参数多集中在压务鞋垫采集的压力参数、惯性传感器及红外捕捉系统采集的人体运动学参数,其测量需要较为昂贵的设备或需受试者自身佩戴设备,无法满足步态采集的便携化。为进一步推进测量的便捷和低成本,最便捷的影像分析及近年来发展的自动识别技术在未来的研究中应被采用。全自动、无创、无标记的方法是人体运动分析的未来发展方向,这也将为运动生物力学的研究和实践提供一个重大突破。各种计算机视觉和机器学习方法被提出用于三维人体运动跟踪和姿态估计[39‑40],在正常的训练环境和日常环境中,此类方法可以更容易地分析运动,还可为减小实验室环境下的运动与自然状态下运动之间的差异提供解决方案[41]。
4 结束语
本文通过当前文献讨论了利用机器学习模型预测GRF 的应用现状,并分析了当前研究的缺陷及未来的发展趋势。当前预测GRF 的机器学习模型采用了不同的输入参数和不同的学习算法,但各模型的相关系数均高于0.9,说明应用机器学习预测GRF 是科学可行的。但目前的机器学习模型都基于较小的数据集,数据共享可提供更大的数据集以构建全面的学习模型,以应用于更广泛的不同类型的人群。同时目前的学习模型主要用于步行、跑步及部分专项动作,它在人体不同运动中的广泛应用还有待进一步研究。机器学习在人体运动跟踪和姿态估计中的应用也可进一步为GRF 的预测提供更便捷的解决方案。
