基于Inception-BLSTM的滚动轴承故障诊断方法研究
2021-09-19赵凯辉吴思成贺才春查国涛
赵凯辉, 吴思成, 李 涛, 贺才春, 查国涛
(1. 湖南工业大学 电气与信息工程学院, 湖南 株洲 412007; 2. 湖南工业大学 交通工程学院, 湖南 株洲 412007;3. 中车株洲电力机车研究所有限公司, 湖南 株洲 412005; 4. 株洲时代新材料科技股份有限公司,湖南 株洲 412007)
滚动轴承是旋转机械的核心部件之一,其健康状况将直接影响机械设备的安全稳定运行。而滚动轴承在运行时长期受到来自机械结构的复杂交变应力,工作状况比较恶劣,发生故障的概率相对较高[1]。一旦轴承失效,则有可能导致机械设备损坏而引发安全事故。因此,对滚动轴承的健康状况进行及时诊断具有重要意义。
滚动轴承的故障通常出现在内圈、外圈及滚动体部位[2],且随着机械设备的运行将产生周期性的冲击,因此轴承的振动信号是识别故障的关键信息。传统基于振动信号的轴承故障诊断方法,通常采用人工提取特征的方式[3],例如快速傅里叶变换[4]、小波变换[5]、经验模态分解[6]等,然后利用支持向量机[7]、k近邻算法[8]以及BP神经网络[9]等分类器得出诊断结果。然而这些特征提取方法依赖大量先验知识,容易引入人为误差且泛化能力差。此外,以支持向量机为代表的浅层模型难以建立复杂的数据识别机制,因此传统的轴承故障诊断方法具有一定的局限性。
随着现代工业的发展,故障监测系统不断完善,用于分析的故障数据也随之大量增加,而深度学习技术具有处理大量数据并进行智能分析的能力,因此逐渐成为了故障诊断领域中的研究热点[10]。其中,卷积神经网络(convolutional neural network, CNN)展现出了强大的特征提取能力,得到了广泛应用。Wang等[11]通过波叠加法对轴承振动信号进行成像,利用CNN提取图像中的故障特征。高佳豪等[12]将自参考适应降噪方法与CNN结合,有效实现了振动干扰下的轴承故障识别。Inception是一种多尺度卷积核并行的结构,相比标准CNN结构能够提取到更丰富的特征,且易于实现深层网络结构。朱浩等[13]基于Inception模型结合注意力机制实现了滚动轴承故障诊断,利用Inception模块提取不同尺度的故障特征,达到了优于单一CNN的识别效果。尽管上述方法能够有效提取抽象特征,然而,对于具有一定周期性的轴承振动信号,单一的卷积核结构难以充分捕捉故障信号在时间上的内在关联。
长短时记忆(long short-term memory, LSTM)神经网络是一种改进的递归神经网络(recurrent neural network, RNN)。其结构可以充分提取信号的时间特征,并通过门控结构保持训练时的梯度稳定,在处理序列数据时具有独特的优势。Shi等[14]通过堆叠降噪自动编码器重构振动信号,并利用LSTM提取出时序关系从而实现轴承状况的预测。池永为等[15]通过傅里叶变换得到振动信号的频谱特征,再利用LSTM捕捉时间依赖性从而实现轴承故障诊断。然而,LSTM每个时间步的记忆单元仅包含之前的输入信息,对轴承振动信号这类周期信号的时间依赖性捕捉不够充分。针对这一问题,Graves等[16]提出了双向长短时记忆(bidirectional long short-term memory, BLSTM)神经网络,从前后双向学习数据的时间依赖性,能够更充分地捕捉时间特征。然而,该结构仍然难以提取故障信息的深层特征,需要结合其他特征提取算法才能有效地识别故障。
针对上述两种模型的特点,许多学者进行了将CNN与LSTM模型相结合的研究。Zhao等[17]提出了一种CNN-BLSTM模型,利用CNN提取局部抽象特征后,再通过BLSTM融合时间特征。Qiao等[18]提出了一种将一维及二维CNN与LSTM相结合的轴承故障诊断模型,分别将原始振动信号与其时频图像作为输入,并分别在不同维度进行特征提取与融合。Wu等[19]提出了一种基于注意力机制的CNN-LSTM-BLSTM模型,取得了优于单一CNN以及LSTM的性能。上述方法展现了CNN与LSTM相结合的优势,然而仍然存在卷积核尺度不够丰富的不足。
为解决CNN提取特征缺少时间关联性且尺度较为单一,以及LSTM难以提取深层特征的问题,本文提出了一种基于Inception-BLSTM(IBLSTM)的滚动轴承故障诊断模型,以进一步提高滚动轴承故障诊断精度。该方法无需相关的先验知识,能够从轴承振动信号中自适应地提取较为全面的特征信息,实现滚动轴承故障诊断。首先,设计Inception模型提取轴承振动信号中的多尺度深层特征;其次,设计BLSTM捕捉特征信息的时间依赖性,然后通过全连接层以及Softmax分类器得出故障诊断结果;最后通过在多种场景下的实验,验证了所提出方法的有效性,并与几种相关模型进行对比,验证了所提出方法的优势。
1 相关理论
1.1 卷积神经网络
CNN是一种具有局部连接、权值共享等特点的深层前馈神经网络[20]。其优势在于能够通过卷积、池化操作自适应地提取隐含在数据中的特征信息,且随着网络层数的加深,提取到的特征信息也更抽象。CNN的结构通常由卷积层、池化层、全连接层组成[21]。
卷积层利用多个卷积核对输入数据通过卷积运算,再经过激活函数映射得到特征信息,计算过程如下
(1)

池化层通过计算局部最大值或平均值对卷积运算得到的特征序列进行降采样[22],在减小网络参数的同时过滤了部分冗余信息,计算公式如下
(2)

通过多个卷积、池化层得到特征信息后,全连接层进一步拟合特征数据与真实标签之间的映射关系。对于多分类任务,最后一个全连接层将利用Softmax得出分类结果。
1.2 Inception模型
Inception模型是一种对卷积层的深度及宽度进行扩展后得到的模型。相对于传统CNN只能对具有相同超参数的卷积层进行堆叠,Inception模型在同一卷积层中可以具有多个通道,每个通道能够包含不同尺寸及深度的卷积核,从而使网络能够在不同级别上提取特征。本文的Inception模块基于Inception v1[23]结构,由不同尺寸的一维卷积核构成,如图1所示。通过这种结构,网络能够从原始振动信号中提取到多尺度的抽象特征。此外,每个通道都具有尺寸为(1, 1)的卷积核对输入数据进行降维,同时增加了网络的深度以及非线性能力。

图1 Inception模型结构Fig.1 The structure of Inception
1.3 长短时记忆神经网络
针对RNN在训练时容易产生梯度消失及爆炸的问题,Hochreiter等[24]提出了一种改进的序列模型LSTM。其特点是在每个记忆单元中都引入了门控结构,使网络具有控制内部信息积累的能力,其结构如图2所示。
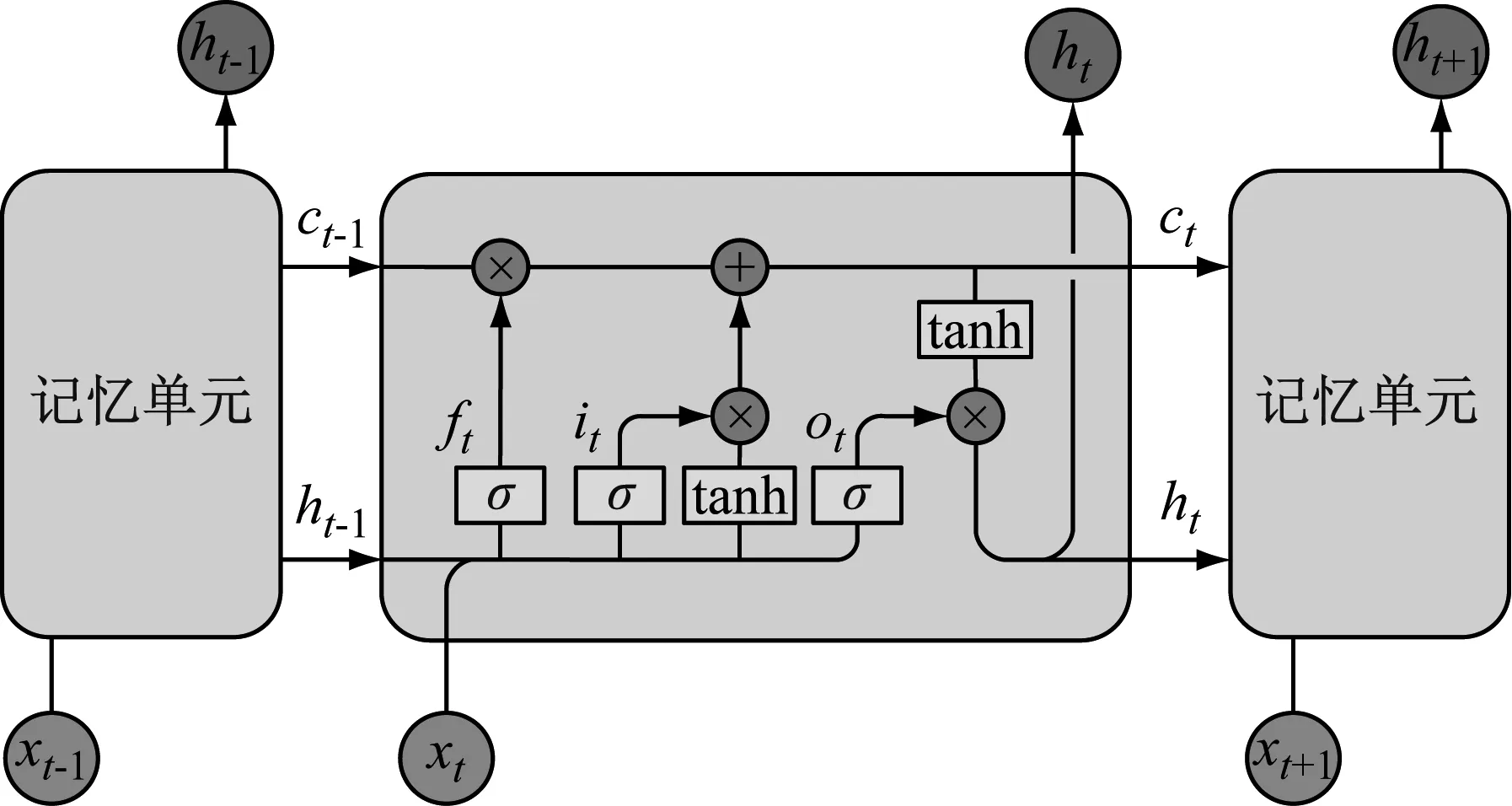
图2 LSTM记忆单元结构Fig.2 The structure of LSTM memory cell
LSTM单元中最核心的部分是3种门控结构,分别为遗忘门ft、输入门it、输出门ot,表达式如下
ft=σ(Wf·[ht-1,xt]+bf)
(3)
it=σ(Wi·[ht-1,xt]+bi)
(4)
ot=σ(Wo·[ht-1,xt]+bo)
(5)
式中:ht-1与xt分别为上一时刻的输出与当前输入信息;W为权重;b为偏置项;σ为Sigmiod激活函数。
得到门控值后,记忆单元更新状态并得到输出,计算过程如下
(6)
(7)
ht=ot·tanh(ct)
(8)

1.3 BLSTM
BLSTM是在LSTM基础上引入时间方向形成的改进结构,通过两个LSTM层分别从前、后两个方向对输入数据进行序列建模,假设输入序列的长度为T,BLSTM结构如图3所示。
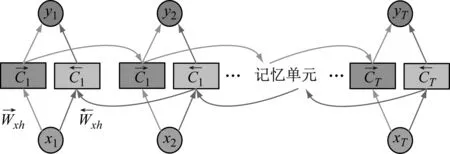
图3 BLSTM结构Fig.3 The structure of BLSTM
在图3所示的BLSTM网络中,前向层从时间步1迭代到T,后向层则与之相反,两层LSTM单元的状态信息共同决定输出,计算过程如下
(9)
(10)
(11)

2 基于Inception-BLSTM的滚动轴承故障诊断
2.1 模型结构
由于Inception模块能够自适应提取信号中的深层特征,减小对故障诊断先验知识的依赖以及人为选择特征导致的误差,而BLSTM能够从前后两个方向学习序列的时间依赖性,使特征信息更加全面。本文结合两种模型的优势,构建了Inception-BLSTM模型进行滚动轴承故障诊断,其结构如图4所示。

图4 Inception-BLSTM模型结构Fig.4 The structure of Inception-BLSTM model
该模型将原始振动信号作为输入,由Inception模块提取多尺度局部抽象特征。之后利用BLSTM从前向和后向对其进行序列建模,充分学习特征在时间上的前后依赖性。最后使用全连接层对特征信息与故障模式之间的关系进行映射,并通过Softmax分类器输出诊断结果。
2.2 模型训练
模型在训练期间将不断根据当前误差更新网络参数,以拟合输入信息与真实标签的映射关系。本文采用交叉熵损失函数(cross-entropy loss function)作为误差的代价函数,其表达式如下
(12)

为了提高模型的训练效率并避免网络参数陷入局部最优的问题,使用分批训练的方法。训练方式为监督学习,采用小批量梯度下降(mini-batch gradient descent)算法更新参数,网络中第l层的权重W以及偏置项B通过以下公式更新
(13)
(14)
式中:η表示学习率;(X,Y)为输入的训练数据,X与Y分别表示样本序列以及对应的标签;L为损失函数。
3 实验与分析
3.1 实验数据集
实验数据来自美国凯斯西储大学(CWRU)滚动轴承数据中心[25],数据集包含不同负载下、不同故障位置及损伤程度的轴承振动信号。CWRU轴承故障实验平台如图5所示。实验轴承型号为SKF6205,在0 HP、1 HP、2 HP、3 HP 四种不同负载下运行,故障包括内圈、外圈及滚动体3种位置,损伤直径分别为 0.007 inch、0.014 inch、0.021 inch 三种尺寸。实验平台以12 kHz采样频率通过加速度传感器采集得到轴承的振动信号,图6展示了0 HP 负载下0.007 inch 的3种故障信号以及正常信号的时域波形。

图5 CWRU轴承故障实验平台Fig.5 Bearing fault experimental platform of CWRU
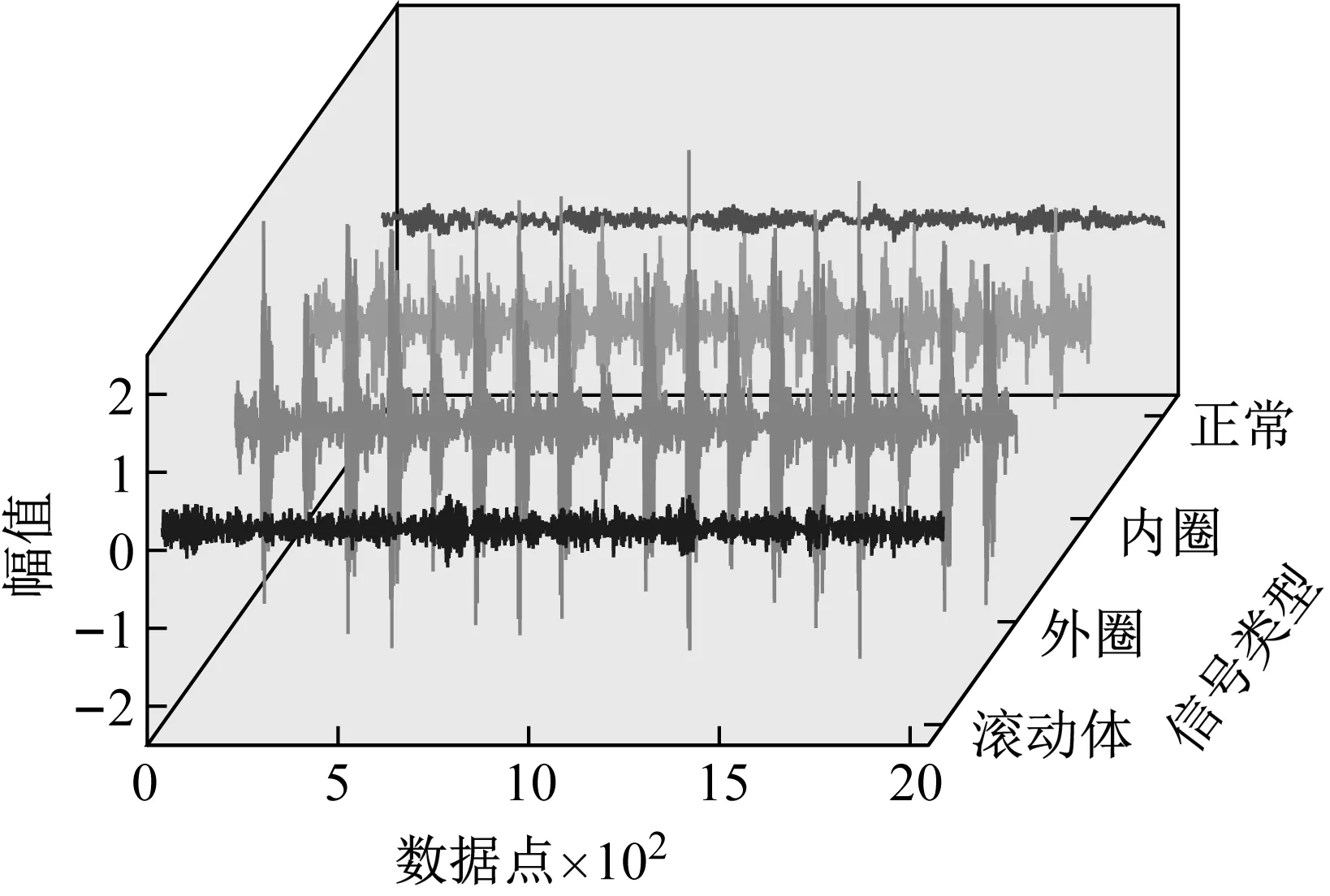
图6 0 HP下4类时域信号Fig.6 Time domain signal of 4 class under 0 HP
3.2 数据增强及标准化
实验将每500个数据点划分为一个样本,由于每种信号的样本数量较少,模型训练时容易出现过拟合的现象。为了避免这一问题,本文使用重叠采样的方
法增强数据集,将长度为500的采样窗口沿时间轴以350个数据点的步长移动,重叠部分为150个数据点,具体过程如图7所示。这样得到的增强数据集共有4 000个样本,如表1所示。

图7 数据增强Fig.7 Data augmentation
此外,为了使训练过程更稳定,采用Z-Score标准化将数据的所有特征都映射到同一尺度上,公式如下
(15)


表1 实验数据集Tab.1 Data set of experiment
3.3 模型参数
Inception-BLSTM模型结构中, Inception模块分别设计尺寸为(1, 8)、(1, 32)、(1, 64)的卷积核[26],以提取多尺度局部抽象特征;BLSTM从双向提取时间特征,设置其隐藏层为40;3个全连接层实现特征对故障模式的映射,从而得出故障诊断结果。经过多次实验后,最终确定的模型参数如表2所示。

表2 Inception-BLSTM模型参数Tab.2 The parameters of Inception-BLSTM
为了验证Inception-BLSTM(IBLSTM)模型结合Inception模块与BLSTM的优势,将其分别与CNN[27]、BLSTM、LSTM[28]模型相比较,此外也加入了CNN-LSTM(CLSTM)模型进行对比。各模型结构如表3所示。

表3 各模型结构Tab.3 The structure of each model
此外,模型的训练设置如下:训练轮数为20;每轮训练的数据随机排序并将每400个样本分为一批;初始学习率为0.002且每5轮训练以0.8的倍数减小;优化器为adam;执行环境为单GPU。
3.4 单负载场景实验
为了验证模型在单负载场景下对轴承故障诊断的有效性,将数据集划分为 0 HP、1 HP、2 HP、3 HP 负载下的4个子集,使用上述5种模型分别进行实验。由于网络初始参数均随机生成,且每轮训练的数据都随机打乱顺序,为了避免偶然误差,将每组实验重复进行10次并记录平均准确率。
图8和表4为5种模型的单负载场景实验结果,可以得出基于LSTM以及BLSTM结构的序列模型识别精度不到80%,远低于具有卷积核结构的模型。原因是其结构难以提取高级特征,对故障特征的表达能力不足。而三种具有卷积核结构的模型均取得了较高的准确率,其中精度最低的单一CNN模型也超过了98%,体现了卷积核能够捕捉深层抽象特征的优势。而本文提出的IBLSTM模型则能够提取出信号的多尺度抽象特征,并且从前后两个方向进一步对特征赋予时间依赖性。因此,IBLSTM模型取得了最好的轴承故障诊断效果,体现了所提方法的有效性及优势。

图8 单负载场景实验结果Fig.8 The result of experiment under single load
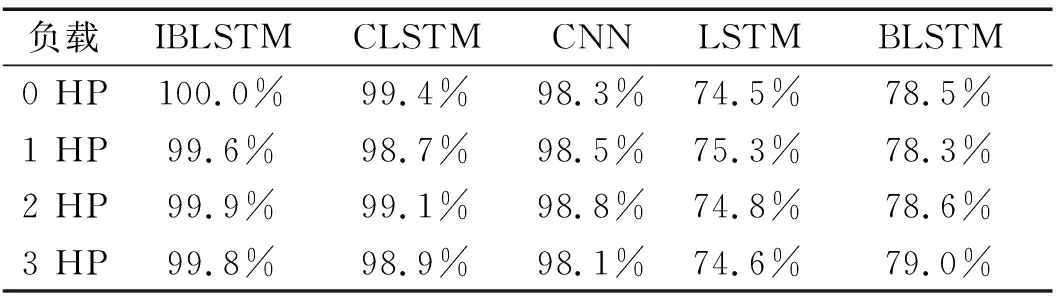
表4 单负载场景平均识别准确率Tab.4 Average recognition accuracy under single load
3.5 多负载场景实验
实际应用场景中,轴承通常在不同负载的工况下运行,为了验证模型在该场景下故障诊断的有效性,将4种负载的数据混合进行实验。加载数据集后,同样使用上述5种模型进行训练并测试。训练过程中,网络将随着迭代过程记录模型的故障识别性能,训练过程准确率曲线如图9所示。从图9可以得出:IBLSTM在50次迭代后准确率接近100%,且具有最快的收敛速度,这表明该方法在多负载场景下也能够提取到信号中更全面的特征。

图9 训练过程准确率曲线Fig.9 Accuracy curve of training process
训练完成后使用测试集检验模型的性能。为了验证所提出方法的稳定性,重复进行10次实验并记录平均准确率及标准差,结果如表5所示。图10展示了5种模型故障识别准确率的分布情况。

图10 多负载场景准确率分布Fig.10 Accuracy distribution under multiple load
通过表5和图10可得,在多负载场景下,两种序列模型的识别精度反而有所上升,原因是训练样本的增加提高了模型的泛化能力。而具有卷积核结构的模型识别精度均超过了97.5%,仍然明显高于两种序列模型,但相较于单负载场景有所下降,原因是多负载场景下不同故障信号的特征频率更容易发生混淆。其中IBLSTM仍然保持了最高的准确率,达到了99.6%且具有良好的稳定性。此外,单一CNN模型与CLSTM模型相比较也展现了将卷积核结构与LSTM模型相结合后,特征提取更为充分且显著减少训练时间的优势,其原因是卷积核提取的局部特征经过序列建模后,输入到全连接层的数据显著减少,降低了模型训练过程的计算量。相比之下,所提出的IBLSTM方法取得了最优的故障诊断性能,并保证了相对较高的学习效率。

表5 多负载场景测试集实验结果Tab.5 The result of experiment under multiple load
图11为IBLSTM模型的故障识别混淆矩阵,其纵坐标为网络预测的标签,横坐标为真实标签,斜对角线上的元素表示模型预测正确的结果,最底层一行统计了每种故障的识别精度以及平均值。从图11可以得出模型在多负载场景下取得了接近100%的故障识别精度,这表明该方法能够较为准确地判断故障的位置以及损伤程度,且具有良好的负载适应性。
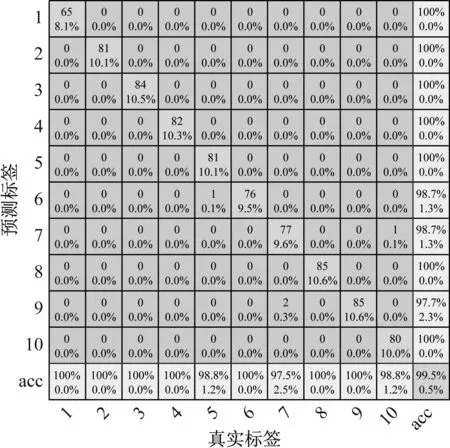
图11 IBLSTM混淆矩阵Fig.11 Confusion matrix of IBLSTM
3.6 随机干扰场景实验
在实际应用场景中,轴承在运转时通常会产生不规则的振动,为了验证模型的抗干扰能力,在多负载场景的数据集中添加高斯白噪声得到不同信噪比的样本,以模拟不同干扰强度下的工况。图12展示了0 HP负载下4类加入噪声后的振动信号,其纵坐标为加速度幅值a,横坐标为时间t。与原始信号相比,添加噪声后其周期性冲击分量明显减弱,随着信噪比不断降低,模型对轴承故障的辨识将更加困难。

图12 加入噪声的轴承振动信号Fig.12 Bearing vibration signal diagram with noise
图13展示了5种模型在信噪比为10 dB~30 dB场景下的实验结果。可以得出所提出的IBLSTM在随机干扰场景下仍然具有最优的性能,当信噪比超过20 dB时准确率达到了99%以上,接近模型对原始信号的识别精度,表明该模型具有一定抗干扰能力。随着信噪比不断降低,5种模型的识别准确率也随之下降,而具有卷积核结构的模型相较于两种序列模型具有更好的抗干扰能力,其原因是卷积、池化层结构可以提取更抽象的特征,从而减小了随机干扰的影响。相比而言,所提出的IBLSTM方法在噪声干扰下仍然展现了最优的故障识别性能,这表明该模型具有良好的鲁棒性。

图13 不同信噪比场景下识别精度Fig.13 Recognition accuracy testing on signals with different SNR
4 结 论
本文提出了一种Inception-BLSTM滚动轴承故障诊断模型,通过Inception模块自适应提取多尺度特征并利用BLSTM赋予时间依赖性,能够有效识别不同工作状况下的轴承故障,并准确定位故障位置以及损伤程度。通过理论分析与实验验证得到了以下结论:
(1) 该方法直接将原始一维振动信号作为网络的输入,利用深度学习模型自适应学习故障特征信息,有效避免了人工提取特征主观、片面的缺点。
(2) 克服了单一CNN模型提取特征尺度不够丰富且缺少时间依赖性的问题,也弥补了序列模型无法学习深层特征的缺陷,并针对轴承振动信号具有周期性特点采用BLSTM进一步捕捉特征序列的前后关联性。
(3) 采用重叠采样的方法进行数据增强,得到更多的样本来扩充数据集,克服了小样本训练容易出现过拟合及泛化能力弱的不足。
(4) 由实验结果可知,提出的Inception-BLSTM方法在多负载下的轴承故障诊断精度达到了99.6%,能够准确识别出轴承故障程度并定位,具有良好的负载适应性。此外,该模型在信噪比高于20 dB的条件下几乎不受随机干扰的影响,表现出了较好的抗干扰能力。
