风浪流载荷下超大型海洋平台拆解船运动特性数值模拟
2021-09-18刘永泽李政谋任少飞
刘永泽,李政谋,任少飞
(哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001)
0 引言
随着全球海洋油气开采设施日益增多,未来将有大量海洋平台因达到工作年限而需要拆解[1]。在对超大型海洋平台进行一体化拆解时一般需3 艘拆解船在海上进行协同作业,2 艘采用举升臂将切割后的海洋平台托起并转移至第3 艘运输船甲板上,在固定后进行运输。其中,举升臂为可拆解装置,且安装数目可根据待拆解海洋平台重量进行调整[2]。
目前,对风浪流载荷下海上作业船舶及海洋平台的运动特性开展了较为广泛的研究。Hu 等[3]针对大型海上平台上部组块浮托安装作业问题,基于数值模拟与模型试验对风浪流耦合载荷下非线性冲击载荷、作业船运动特性进行了研究。李文魁等[4]基于海浪幅值响应算子对船舶在波浪载荷下的纵荡、横荡和首摇运动进行了数值分析。黄致谦等[5]对半潜式海洋平台在极端海况下的运动特性及系泊性能进行了分析。翟佳伟等[6]研究了涡激振动对风浪流耦合载荷下Spar 型浮式风机的运动的影响。袁洪涛等[7]研究了风浪流耦合载荷方向对海洋平台系泊系统运动特性的影响,确定了系泊系统危险工况。李巍等[2]基于模型实验开展了风浪流耦合载荷下双船起重及运输过程,验证了双船运输平台的可行性。孙承猛等[8]对风浪流耦合载荷下深水钻井船漂移载荷进行时域模拟,分析了风浪流分别引起的漂移载荷比例。
研究风浪流耦合载荷下超大型海洋平台一体化拆解船运动特性,对于保证作业安全具有极其重要的意义,但目前相关研究相对较少。针对上述问题,本文基于Sesam 软件研究了风浪流耦合载荷下超大型海洋平台拆解船的运动特性,首先采用HydroD 频域分析模块得到波浪载荷下拆解船运动特性,然后将频域分析得到的船体运动传递函数、附加质量等导入Sima 时域分析模块,求解风浪流耦合载荷下拆解船运动特性,并探讨了举升臂及载荷方向对拆解船运动特性的影响规律,旨在为超大型海洋平台拆解作业提供一定的指导。
1 拆解船及环境载荷参数
本文所研究的拆解船总长200 m,宽45 m,吃水9.5 m,拆解船及举升臂如图1 所示。拆解船首部布置2 套侧推进器,尾部布置2 套SSP-5 吊舱式全回转电力推进系统,并配合DP3 动力定位系统实现船舶精准定位,推进器布置及坐标系规定如图2 所示。
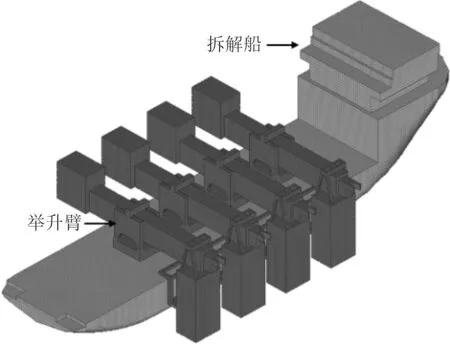
图1 拆解船及举升臂示意图Fig.1 Schematic diagram of the dismantling ship and lifting arms
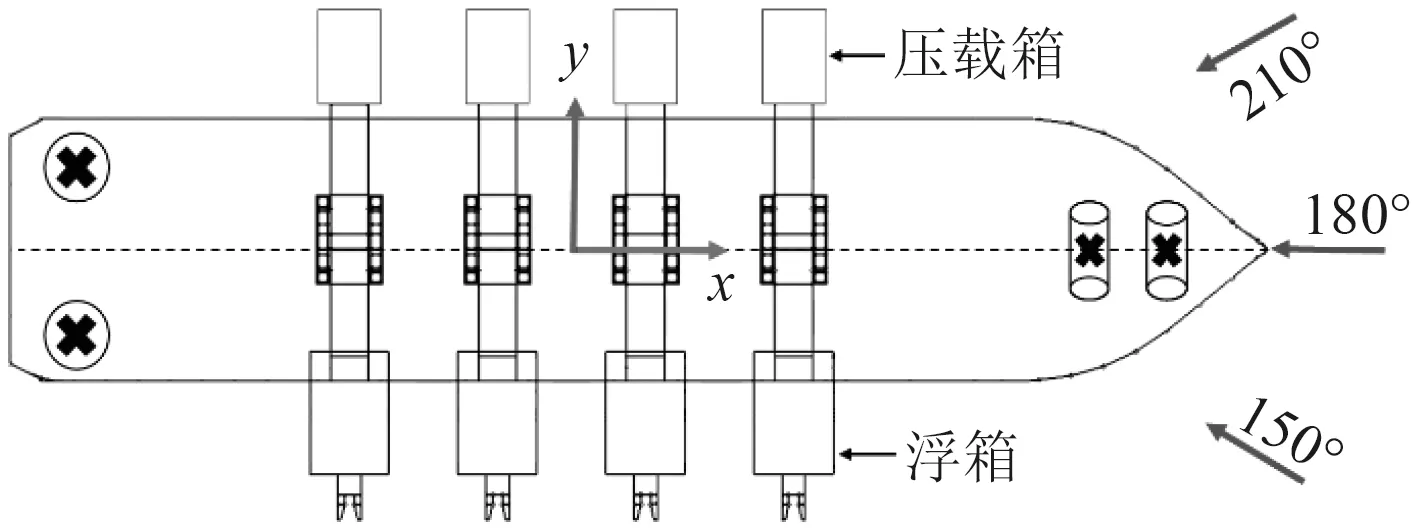
图2 推进器布置及坐标系规定Fig.2 Propeller arrangement and the definition of coordinate system
拆解船作业海域为挪威北海,为保证安全在3 级及以下海况下进行拆解作业。因此,采用3 级海况参数进行数值计算,得到拆解船在风浪流载荷下的最大运动幅值。具体环境载荷参数设置如下:采用NPD 风谱模拟风载荷,平均风速7 m/s;采用Jonswap 谱模拟波浪载荷,有义波高1 m,谱峰周期4 s;流速0.5 m/s[9]。
2 拆解船运动特性频域分析
本文首先使用Sesam 软件中的HydroD 模块进行频域分析,得到仅考虑波浪载荷时拆解船运动特性及Sima 时域分析模块所需的船体运动传递函数和附加质量等参数。考虑到船舶在作业时将船首朝向风浪加载方向能显著提高船舶操控性[10],因此将浪向角分别设置为150°,180°和210°(见图2)。为了对比举升臂对拆解船运动特性的影响,本文同时模拟了不考虑举升臂船舶的运动特性,此时由于结构关于船体中纵剖面对称,只需考虑150°和180°浪向角。根据挪威北海波浪平均周期概率分布,设置作业水深为100 m,波浪周期为0.1~1.1 rad/s[9]。
安装举升臂和未考虑举升臂影响的拆解船运动特性频域计算结果如图3 所示。可以发现:1)举升臂对拆解船在波浪载荷下的纵荡、垂荡及纵摇运动影响较小,如图3(a)、图3(c)及图3(e)所示;2)对于安装举升臂的拆解船,波浪频率为0.55 rad/s、浪向角150°时拆解船运动相对较大,此时横摇RAO 为210°浪向角下的2.75 倍,首摇RAO 为210°浪向角下的2.96 倍,这主要由安装举升臂后船舶不对称性引起,如图3(d)和图3(f)所示;3)波浪频率为0.55 rad/s、浪向角150°下安装举升臂的拆解船横摇RAO 为未考虑举升臂的2.79 倍,且首摇RAO 为未考虑举升臂的3.93 倍,如图3(d)和图3(f)所示,即安装举升臂后拆解船横荡及首摇运动显著增大,且举升臂造成的不对称性会使拆解船对浮箱侧加载的波浪载荷更加敏感。
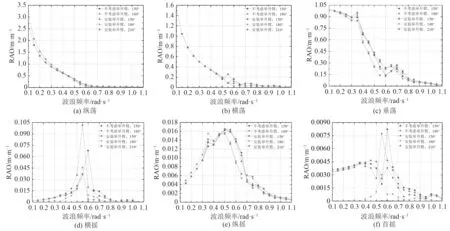
图3 波浪载荷下拆解船六自由度运动特性频域计算结果Fig.3 The 6-DOF motion characteristics of the dismantling ship under wave predicted by the frequency domain algorithm
3 拆解船运动特性时域分析
将频域计算得到拆解船六自由度运动传递函数和附加质量等导入至Sima 时域分析模块中,同时考虑风和流耦合载荷的影响,对安装举升臂的拆解船在150°及210°风浪流载荷下的运动特性进行模拟,数值结果如图4 所示。从图中可以看出,当风浪流载荷方向为210°时,拆解船的纵荡、横荡运动幅度都小于150°方向加载,而首摇运动幅度则大于150°方向加载时。图5 给出了上述2 个方向下安装举升臂拆解船的运动轨迹点,从图中可以看出风浪流载荷从210°方向加载时船舶的在X-Y平面的运动轨迹所在范围相较150°时更小,即风浪流从压载箱侧加载时拆解船运动幅值相对较小,有利于拆解作业。
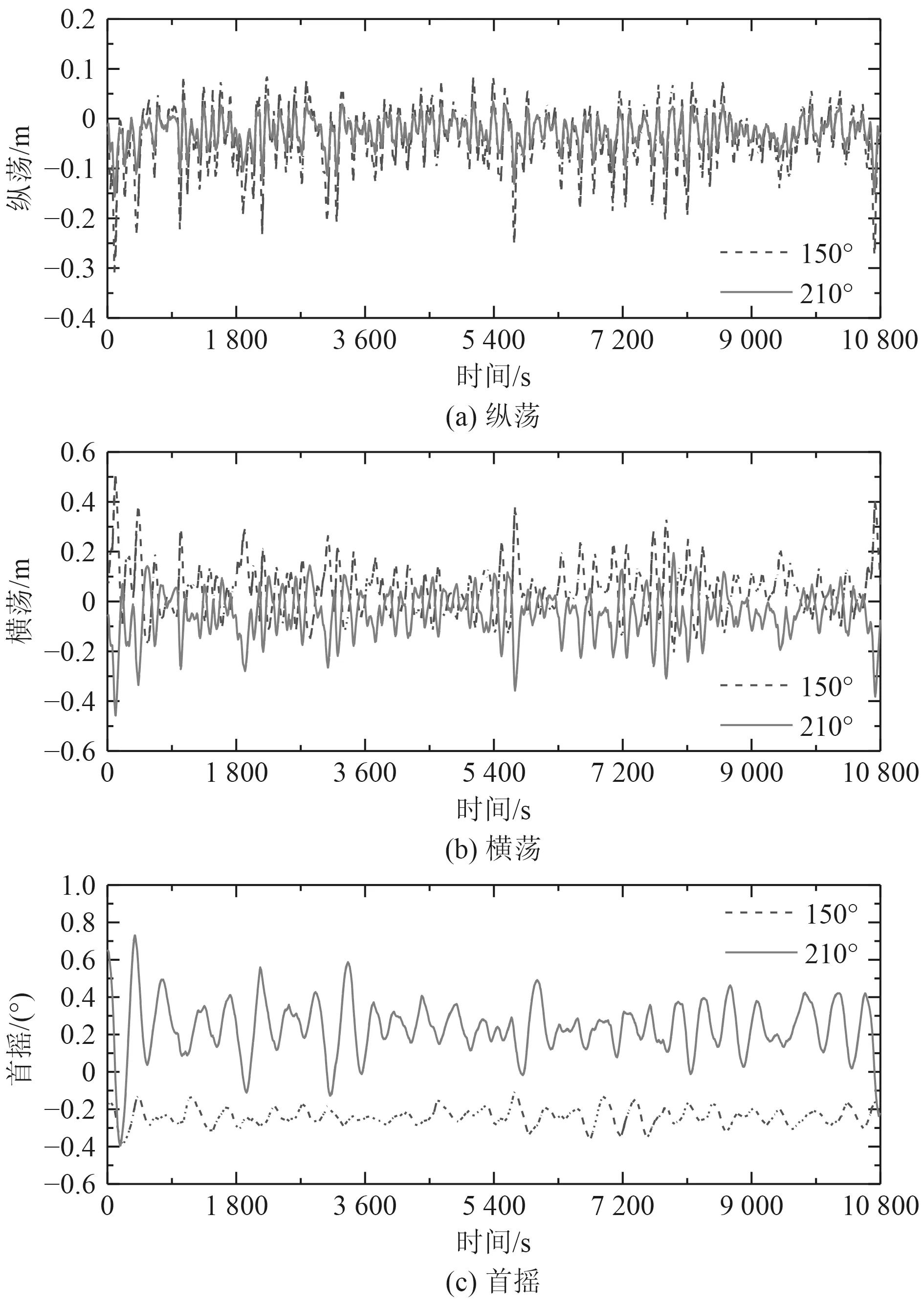
图4 安装举升臂拆解船在150°和210°风浪流载荷方向下时运动时历曲线Fig.4 The motion-time curves of the dismantling ship with lifting arm under wind,wave and current loads of 150° and 210° directions
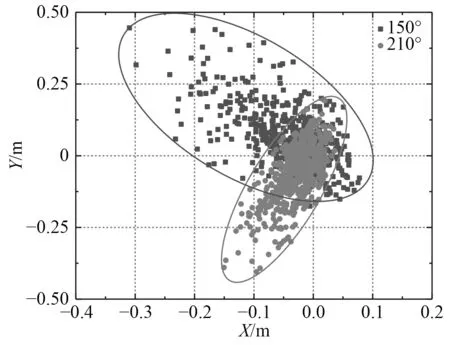
图5 安装举升臂拆解船在150°和210°载荷方向下运动轨迹点Fig.5 The trajectory points of the dismantling ship with lifting arm under wind,wave and current loads of 150° and 210° directions
由于纵荡、横荡及首摇运动对拆解作业影响最大[3],因此对上述3 个方向的时域计算结果进行统计分析,得到考虑和不考虑举升臂的拆解船在150°,180°及210°载荷方向下的运动最大值、最小值及运动幅度(最大值-最小值)[11],数值计算结果见表1。从表中可以发现:1)风浪流载荷从180°方向加载时,拆解船在安装举升臂后纵荡运动幅度增加了102.4%;2)风浪流载荷从150°加载时,拆解船在安装举升臂后纵荡运动幅度增加了87.3%,横荡运动幅度增大了9.1%,首摇运动幅度减小了75.5%;3)对于安装举升臂的拆解船,风浪流载荷从210°方向加载时比从150°方向加载时纵荡运动幅度减小了51.1%,横荡运动幅度减小了8.9%。
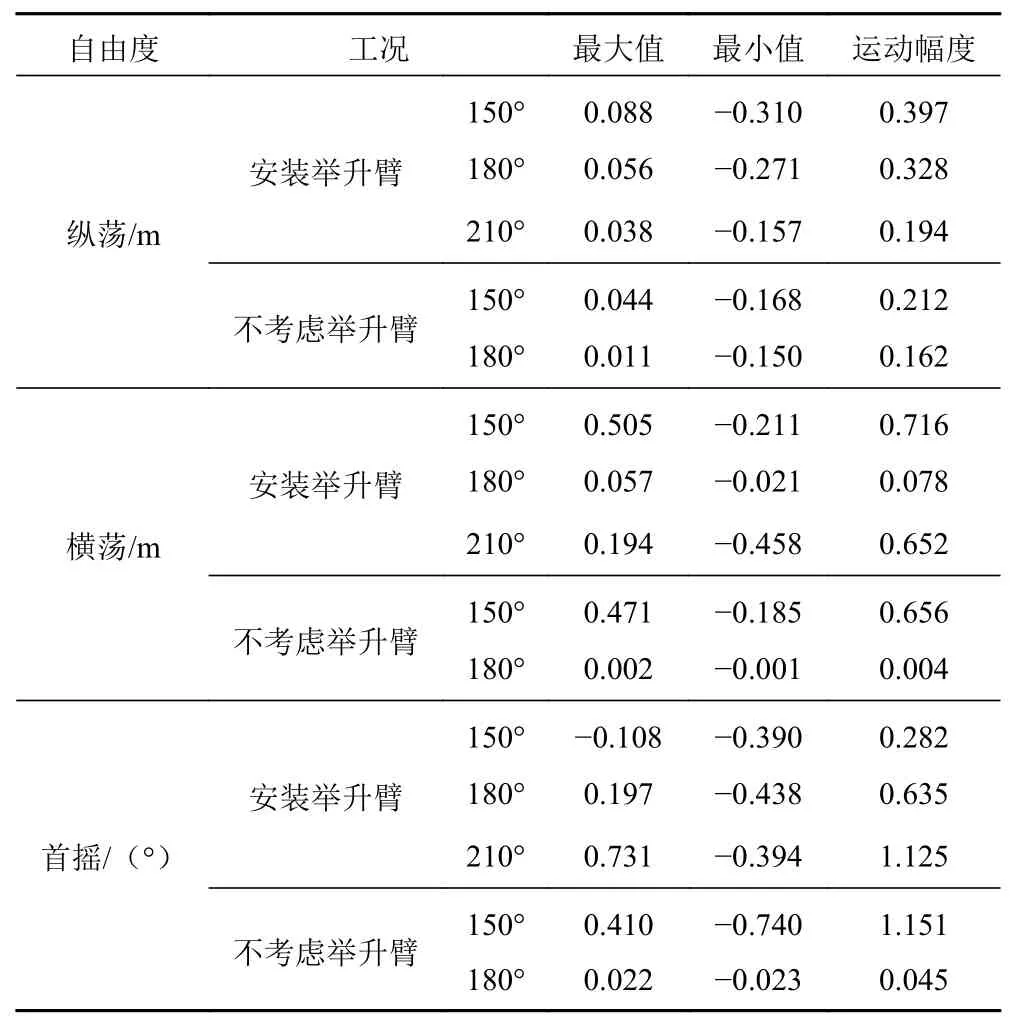
表1 风浪流耦合载荷下拆解船纵荡、横荡及首摇时域计算结果Tab.1 Time-domain calculation results of surge,sway and yaw of dismantling shipunder wind,wave and current loads
4 结语
本文以一艘超大型海洋平台拆解船为研究对象,基于HydroD 频域分析模块得到波浪载荷下拆解船运动特性,然后将频域分析得到的运动传递函数和附加质量等参数导入Sima 时域分析模块,并同时考虑风和流载荷的影响,研究风浪流耦合载荷下船体运动特性,探讨了举升臂及载荷方向的影响。研究结果表明:
1)安装举升臂后的拆解船在波浪载荷下的横荡、横摇、首摇方向上的运动幅值会显著增大。频率为0.55 rad/s的波浪从210°加载时,与未安装举升臂拆解船相比,安装举升臂后拆解船横摇R A O 和首摇RAO 分别增加了179%和293%;风浪流载荷从150°和180°方向加载时安装举升臂后拆解船纵荡运动幅度分别增大了84.4%和55.4%。
2)举升臂导致拆解船结构不对称,风浪流载荷从210°方向加载时比150°加载时拆解船纵荡和横荡运动幅度分别减小了51.1%和8.9%。为保证作业安全性,应尽量选择风浪流载荷从压载箱一侧加载时进行作业。
