履带式洪涝救援平台的设计与实现
2021-09-18崔俊国,高翔,侯文辉,李延隆,张俊,鲁中歧,邵建鑫,张啸
崔俊国,高翔,侯文辉,李延隆,张俊,鲁中歧,邵建鑫,张啸
摘要:為了解决洪涝灾害中常规救援方式存在的运移距离短、效率低下、安全可靠性低等难题,设计了一种可应用于城市洪涝灾害救援的新型履带式洪涝救援平台。首先,对整机机械结构(行走、升降、救援设备布置、平台防腐等)进行设计;其次,对关键设计参数进行理论计算分析,并运用数值模拟分析技术对关键结构进行仿真分析;最后,基于所设计的救援平台,建立城区模型、受灾分析模型和救援过程模型,运用K均值聚类多目标优化方法进行救援路径规划分析,探讨城市洪涝救援新模式,并与传统城市洪涝救援进行对比分析。结果表明:救援平台相较于传统救援在安全可靠性、快速性上有了极大改善;提出了新型的城市洪涝救援模式,其救援效率高于传统救援模式的效率。新型履带式洪涝救援平台可应用于救援艇运输、救援物资运输以及在灾区内部提供紧急治疗,并可作为受灾区受困人员中转基站,所提出的救援模式可有效拓宽洪涝灾害的救援方式。
关键词:机械设计其他学科;洪涝灾害;平台设计;有限元分析;救援模式
中图分类号:TH128文献标识码:ADOI: 10.7535/hbgykj.2021yx05003
Design and implementation of crawler type flood rescue platform
CUI Junguo1,2,GAO Xiang1,2,HOU Wenhui3,LI Yanlong4,ZHANG Jun1,2,
LU Zhongqi1,2,SHAO Jianxin1,2,ZHANG Xiao5
(1.School of Mechatronic Engineering,China University of Petroleum,Qingdao,Shandong 266580,China;2.National Engineering Laboratory of Ocean Geophysical Prospecting and Exploration Equipment,Qingdao,Shandong 266580,China;3.China National Oil & Gas Drilling Equipment Engineering Technology Research Center Company Limited,Baoji,Shaanxi 721002,China;4.Bohai Equipment Liaohe Drilling and Production Equipment Branch Company,Panjin,Liaoning 124010,China;5.School of Mechanical and Power Engineering,Shanghai Jiaotong University,Shanghai 200240,China)
Abstract:In order to solve the problems of short transport distance,low efficiency,low safety and reliability of conventional rescue methods in flood disasters,a new crawler flood rescue platform was design to apply in urban flood disaster rescue.Firstly,the mechanical structure design was carried out,including walking,lifting,rescue equipment layout,platform corrosion and other program design;Secondly,the theoretical calculation and analysis of key design parameters was conducted,and the key structure was simulated and analyzed by using the numerical simulation.Finally,based on the designed rescue platform,the establishment of the city model,flood damage analysis model and rescue process model were proposed,the rescue path planning analysis was conducted by using the K-means clustering multi-objective optimization method,and compared with the traditional urban flood rescue,the new mode of urban flood rescue was discussed.The results show that compared to the traditional rescue,the rescue platform has greatly improved in safety,reliability,and rapidity.The rescue efficiency of the proposed new urban flood rescue mode is higher than the efficiency of the traditional rescue mode.The new crawler type flood rescue platform can be applied to rescue boat transportation,rescue material transportation and can provide emergency treatment within the disaster area,which can be used as a transit base station for stranded people in the affected area.The proposed rescue mode can effectively broaden China′s rescue methods in flood disasters.
Keywords:mechanical design other disciplines;flood disaster;platform design;finite element analysis;rescue mode
洪水灾害会阻断交通系统,影响工矿企业、农业的发展,严重危害人民生命财产安全,带来难以预估的人员伤亡[1]。2020年中国发生严重洪涝灾害,据中华人民共和国应急管理部统计,主汛期以来洪涝灾害造成江西、安徽、湖北、湖南等27省(市、区)5 481.1万人次受灾,直接经济损失1 444.3亿元。
目前,应对灾害的常规救援方式是紧急组成救援队。一方面利用冲锋舟、橡皮艇等简易水上救援装备积极营救受灾人员,发放救援物资;另一方面组织救援人员加固堤坝,疏排水道。整个过程中任务重、难度大,同时要保证各类水上救援物资跟进,该救援方式存在很多问题[2-4]:
1)因水流冲击大,冲锋舟、皮筏艇与救援中心据点距离过长并不好控制,或因动力不足影响救援难度,甚至会导致救援人员在救援过程中因设备停机等状况陷入险境;
2)救援装备空间有限,承载能力低,一次只能救援少数人员或运输少数救援物资就须进行返程,安置好受灾人员后再开展下一轮救援,救援效率低。
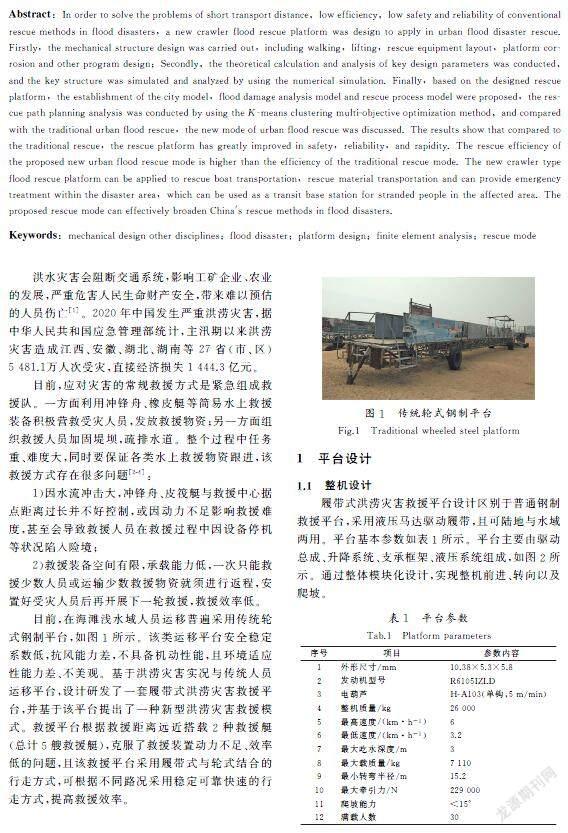
目前,在海滩浅水域人员运移普遍采用传统轮式钢制平台,如图1所示。该类运移平台安全稳定系数低,抗风能力差,不具备机动性能,且环境适应性能力差、不美观。基于洪涝灾害实况与传统人员运移平台,设计研发了一套履带式洪涝灾害救援平台,并基于该平台提出了一种新型洪涝灾害救援模式。救援平台根据救援距离远近搭载2种救援艇(总计5艘救援艇),克服了救援装置动力不足、效率低的问题,且该救援平台采用履带式与轮式结合的行走方式,可根据不同路况采用稳定可靠快速的行走方式,提高救援效率。
1平台设计
1.1整机设计
履带式洪涝灾害救援平台设计区别于普通钢制救援平台,采用液压马达驱动履带,且可陆地与水域两用。平台基本参数如表1所示。平台主要由驱动总成、升降系统、支承框架、液压系统组成,如图2所示。通过整体模块化设计,实现整机前进、转向以及爬坡。
1.2关键部件设计
1.2.1驱动总成设计
采用以履带救援为主、以轮式为辅助的行走方案。救援中,若道路工况未知或已知道路工况复杂,尤其是边缘城镇地区,可采用履带式行走,若路况较好或履带行走方案失效,可采用轮式行走,尽可能保证救援平台运行的稳定性、快速性。
1)履带式行走在设计过程中以运行平稳、抗冲击为设计要求,设计整体式履带底盘,如图3所示。底盘采用矩形钢焊接而成,两侧各设计4个法兰盘与履带螺栓连接,防止运动过程中变形。底盘上方含有配套法兰盘联接主支撑框架,承受整机载荷。
2)轮式行走通过液压驱动主支撑4根升降轮,将平台支撑,使履带升起,进而通过应急轮实现平台行走,应急升降轮如图4所示。
1.2.2升降系统
在救援艇选择上,结合受灾实况决定选用2种救援艇,不同类型救援艇情况如表2所示。
升降装置主要包括主救援艇升降与辅助救援艇升降[5]。
1)主救援艇起升设计
选用单缸曳引4根钢丝绳实现起升框架升降方案。起升框架底部支承梁采用工字钢焊接而成,辅助护栏为槽钢焊接。两侧4根槽钢立柱上栓接耐磨材料,与主框架轨道配合,通过两侧天轮下放钢丝绳达到稳定升降的目的。起升框架在钢丝绳的曳引下,由两侧滑道固定升降方向,实现框架升降。在安装过程中,起升框架尾部要略高于头部,抬升角为8°~10°,以防救援艇在停泊过程中滑出起升框架,造成危险。起升布置方案如图5所示。
2)辅助救援艇起升设计
辅助救援艇分布在救援平台的两侧,选取的每艘空载救援艇质量为100 kg,选用微型电葫芦实现起重升降。考虑到平台运行过程中有可能因平台过宽而无法通过,因此在满足设计目标的基础上,平台主体设计的宽度能满足目前中国绝大多数道路标准。但若考虑平台加上辅助救援艇及其起升装置后,平台行进中可能会因自身过宽进而受到某些低高度障碍物阻挡,因此将辅助救援艇起升装置设置与平台甲板同等高度,且辅助救援艇提升高度略低于平台甲板,可保证救援平台通过绝大多数道路而不受道路两侧障碍物的影响。为了防止辅助救援艇在悬挂阶段受到牵引或外力作用导致救援艇悬靠不稳定,因此在救援艇下方安装一对支撑架。该支撑架固定于平台的一端设置有自锁装置,当救援艇被提升至设定高度时,支撑架打开并起到固定作用,如图6所示。
1.2.3主支撑框架设计
主支撑框架是履带式洪涝灾害救援平台设计的承重结构,如图7所示。其主要由支撐梁组成,坐于底盘框架上,采用高强度矩形钢管焊接而成。主支承框架通过滑轮装置承受游艇质量载荷,以及通过上梁柱承受平台设备及人员重力,并将载荷传给履带架。
为便于运输组装,主支撑框架与履带架分体建造,框架上部支承板作为人员承载平台,整体采用焊接工艺,稳定可靠。
1.2.4液压系统
平台自重较大,满载质量可达32 500 kg,液压系统采用三泵并联系统[6-7],参数如表3所示。
行走油路根据设计要求,液压系统必须能够满足左右履带的独立驱动,同时也要满足主升降装置液压缸的独立驱动。故其中2个变量泵用于驱动2个行走马达以及游艇起升装置的液压缸,第3泵为驱动变量泵的先导泵。其液压原理如图8所示,液压系统所需泵布置在主支撑架下方。
1)履带行走装置液压系统原理
本系统为三联泵组液压驱动行走系统。控制回路采用减压阀式的先导操纵回路。阀5由3个手柄进行操纵,其中手柄2,3控制行走马达,每个手柄有前后2个操纵位置,分别控制左右行走马达的正反转,以实现转向。P2,P3分别驱动马达总成2,3和7,8为3位6通换向阀,用以控制进入马达的液流流向,实现马达正反转。7,8分别由 A2,B2和A3,B3液动控制,而A2,B2,A3,B3又由手动手柄控制。当A2上位工作时,换向阀7的下腔注油,推动阀芯使得阀下腔工作,马达2正转;当B2上位工作时,换向阀7的上腔注油,推动阀芯使得阀上腔工作,马达2反转;当A3上位工作时,换向阀8的下腔注油,推动阀芯使得阀下腔工作,马达3正转;当B4上位工作时,换向阀7的上腔注油,推动阀芯使得阀上腔工作,马达3反转。但A2,B2和 A3,B3分别由同一手柄操纵,故可形成多种组合,实现挖掘机两侧马达同时正转、反转、一侧正转另一侧反转、一侧转动一侧停转,可大大提高行走装置机动性能。
2)起升装置液压系统原理
控制阀5中A1,B1的手柄1与控制行走马达的手柄2,3类似,也有前后2个操纵位置,分别控制起升装置液压缸的正反行程。3位6通换向阀6用以控制进入液压缸液流流向,实现液压缸正反行程。6由A1,B1液动控制,而A1,B1又由手动手柄控制。当A1上位工作时,换向阀6的下腔注油,推动阀芯使得阀下腔工作,液压缸1正行程;当B1上位工作时,换向阀6的上腔注油,推动阀芯使得阀上腔工作,液压缸1反行程。
2理论计算与仿真分析
2.1理论计算
2.1.1质量参数
总质量M总:
M总=M0+M1+M2,(1)
式中:M0为整机质量,kg;M1为载人质量,kg;M2为救援艇质量,kg。
2.1.2稳定性计算
参照GB/T 3871.15―2006《农业拖拉机试验规程》要求,对运移平台翻倾条件与质心位置进行计算[8]。
保证救援平台爬坡时不纵向翻倾的条件是:
l0h0>δ,(2)
式中:l0为质心至后支承点的距离,空载时为1.7 m,满载时为0.95 m;h0为质心至地面的距离,空载时为0.95 m,满载时为0.64 m;δ为额定滑转率。
保证救援平台在无横向坡度转弯时,不横向翻倾的条件是:
l12h0>δ,(3)
式中l1为轨距,m。
2.1.3接地比压计算
参照GB/T 7586—2008《液压挖掘机 试验方法》标准要求进行计算。救援平台自重较大,易陷入松软的土地中,履带可以增大与地面的接触面积,减小压强[9-10]:
Ea=gM总2 000bL,(4)
式中:L为履带接地长度,m;g为标准重力加速度,取9.8 m/s2;b为履带板宽,m;Ea为接地比压,MPa。
2.1.4动力计算
根据GB/T 1147.1—2007《中小功率内燃机第1部分:通用技术条件》标准要求进行计算[11]。履带式洪涝灾害救援平台设计配套用R6105IZLD型柴油機,标定功率为132 kW/h,转速为1 800 r/min。
平台最高设计车速运行时所需功率P1:
P1=1ηpf+pw=
1η(M总gfVm+CdAρV3max2)。(5)
最大爬坡度imax为15°时,计算所需功率Pemax:
Pemax=1ηpf+pi+pw=
1η(M总gfVm+
M总gimaxVm+CdAρV3n2),(6)
式中:Vmax为平台最高设计车速,km/h;pf为滚动阻力消耗的功率,kW;pw为空气阻力消耗的功率,kW;pi为坡度阻力消耗的功率,kW;η为传动效率系数;f为滚动阻力系数;Vm为最大扭矩点的低速档行车速度,km/h;Cd为空气阻力系数;A为前进方向迎风面积,m2;ρ为空气密度,kg/m3;Vn为拖拉机取低档速度,km/h。
经计算履带式洪涝灾害救援平台设计满载时以最高时速行驶所需功率P1=3.24 kW,低档速度爬最大坡度时所需功率Pemax=119.11 kW,所需功率均小于标定功率132 kW。
2.2腐蚀与防护设计
该平台是一种水域工程结构物,其主结构为钢架结构,要求使用寿命长,工作强度高。钢结构长期处于盐雾、潮气等环境中,电化学腐蚀较为严重。设备作业过程复杂,需来回往复于陆上与复杂浅水区,整体防腐采用长效保护涂料以及牺牲阳极的阴极防护。参考《海洋平台建造说明书》对牺牲阳极的建造规定,根据牺牲阳极的理论公式[12]计算所需阳极总质量:
Q=ISHK,(7)
式中:Q为设计所需的阳极总质量,kg;I为保护电流密度,A/m2;S为保护面积,m2;H为设计所需的保护时间,h;K为所选牺牲阳极的理论发电量,(A·h)/g。
布置方案如图9所示。
2.3受力部件有限元分析
主支撑框架主要承受上部平台施加的重力载荷以及起升框架承载游艇时所施加的反向作用力。起升框架作业中主要受到两侧拴接的4根钢丝绳曳引力,以及游艇作用于框架底部的重力载荷。利用有限元软件对主支撑框架、起升框架进行加载分析[13-14],结果如图10和图11所示。
由主支撑梁变形云图和应力云图可知,由于起升装置是由钢丝绳收缩而达到升起和下放,因此起升部分受力便施加在天轮的轴承上,最大变形为0.253×10-2 m,应变最大为127.629 MPa,主支撑梁安全稳定性较好。
由起升框架变形云图和应力云图可知,起升框架主要受力点集中在主梁中间部位的焊接连接处,应力部位集中于底部工字钢以及钢丝绳连接处,最大变形为2.851×10-2m,最大应力为172.21 MPa,满足强度要求。3模式设计与实现
3.1城区模型
为更好地解释基于洪涝灾害移动救援平台的救援模式,进行如下说明[15],路网图如图12所示。
针对城区模型,作出如下假设:
1)假设救援人员从道路到建筑物内救援受困人员的时间不计;
2)假设路网规划很规则;
3)居民区街道足够宽,救援艇可进入居民区内。
假设有一城市,地形依托盆地,以城市中的城市体系和交通网络为载体,城市界限较为明显,比较封闭相对独立,可推断该城市为相对封闭和独立的地理单元,可将中心城区与周边村镇相区别开。由于洪涝灾害发生时,中心城区因其地理位置偏向凹陷中心,人口稠密,城区内交通比较拥堵,当洪涝灾害发生时,易发生城市内涝,因此将研究重点放置于与盆地地形类似的中心城区上。假设该城区凹陷中心与周围凹陷不明显地区的海拔差距较小,可按照盆地的源汇理论将整个中心城区分成2个呈环带状分布的区域,易发生大型洪涝灾害的为中心区,而周边过渡区可能仅有浅水分布,有可能该浅水区水深无法达到救援冲锋舟的吃水要求。
在假设路网规划很规则的情况下,可将内城区(即较深水区)划分为网格状,由此得到救援艇从初始位置到救援位置的位移为(Δx,Δy)。
3.2受灾分析模型
假设对全区进行计算机模拟,利用计算机产生一个随机数,这个随机数在0到1之间,假定这个随机数大于0.5时,表示受灾点能被遥感系统侦察到,反之则不能被观察到[16]。
抽样调查往年重点受灾地区的部分县区占地面积以及常住人口数,总结归纳共同特征。假设有一受灾城区,占地面积为120 km2,大致呈长方形分布,根据中心城区人口和面积的比例设定城区人口为30万人。根据中国关于洪涝灾害人口暴露量的统计,大致有10%的人受灾,其中受灾人群中有1%的人被困或有生命危险。根据2011年至今资料分析,随着气象预报准确度的提高,在可预期的洪涝灾害发生前进行预警,在该模型中对实际受灾人数简化[17]。本文设置城区内有60个易发生灾害区(下凹式立交橋、地下通道、铁路桥、公路桥等部分),其中被困的有1~10人。
自然地表水流总是由高处向低处流动,又总是沿着坡度最陡的方向流动,高程落差越大的地方,时段内流入的水就越大[18]。依据这个规律,假定在淹没Δt内流入网格(i, j) 内的洪水量和上游来水水位与当前网格的水位h(i,j)之差。上游来水流速以及网格淹没时间成正比,另外考虑到下游流出的水量,流域蒸散发、地表渗透、降雨等对洪水量的影响,本算法中引入一未知系数μ作为衰减量,可推得经验公式如下:
W(i,j)=μvDr[h0-hi,j]Δt,(8)
式中:Δt为洪水淹没时间,h;h0为上游来水水位,m;v为上游来水流速,km/h。
可推导得出在Δt内淹没网格的洪水增长高度Δh:
Δh=W(i,j)D2r2=μvDr[h0-ht]Δt。(9)
根据拟合洪水水位值的“体积法”,结合洪涝灾害屡次发生的相关数据,计算出相关水位与洪涝灾害分布比例的关系,认为城市70 %的面积受洪涝灾害比较严重,大致分为3个区域,内区、外区和轻微影响区。内区为较深水区,外区为较浅水区,在传统的救援方式中,在受灾较轻地区设立多个救援基站。深水区无法设置临时救援点,浅水区仅存在于城市内部,设置救援点有很多局限条件,因此应急救援指挥部要设置在城市外区即其水深达到可以展开紧急救援的要求[19]。另外与当前遥感技术相结合,可认为指挥部可以通过遥感技术获得受灾情况第一手资料,并可预估出哪些区域可能存在受灾人群与亟待救援的高危地点。
3.3救援过程模型
假设救援场景模拟发生在洪涝灾害发生后,此时,应急预警措施发挥得当。各路巡察搜索队、治安维护队与灾民安置现场已安排妥当。救援车、消防车、防疫车在临时安置点亟待出发,各种物资一应俱全。此时救灾紧急指挥部处于开展紧急救援活动的阶段,由于评估系统对灾中损失进行了快速评估,应急指挥部对灾情发生也有一定了解[20]。将救援基站设置在轻微影响区,同时可以将救援平台视为一个较小的应急救援点,从轻微影响区投放到较浅水区。假设有3个救援平台,救援平台在救灾过程中主要起2个作用:1)可在救援艇饱和后起到中转作用;2)可移动救援平台使救援进程大大加快,救援面积大大增加,扩大了前方救援控制网的有效面积。
为了达到预期目标,救援平台将遵循以下原则进行救援规划:
1)当洪涝灾害预警已充分完成时,救援平台将在第一时间奔赴现场,并由救援基站开向受灾区;
2)救援平台会在接受指挥部和救援艇发出的相关信息后适当进行位置改变,其位置的改变有利于全局救援进行。
为了尽快完成救援平台的就位,开展救援,要求救援平台就位时间小于救援设备和物资的就位时间。
受灾区有60个需要救援的救援点,救援点信息可以通过遥感系统得到。根据统计调查结果,较深水区需救援点约占总救援点90%,即54个救援点;则较浅水区有6个需救援点。依据救援点的信息,将救援基站建立在便于开展最有效救援的地点,并且此地需位置开阔,交通便利。
采用聚类方法将54个待救援点分成3组,每一个分组就代表一个聚类,这3个分组满足下列条件:1)每一个分组至少包含一个数据记录;2)每一个数据记录属于且仅属于一个分组;对于分组,算法首先给出一个初始的分组方法,之后反复迭代改变分组,使得每一次改进之后的分组方案都较前一次好,好的标准是同一分组中的记录越近越好,而不同分组中的记录越远越好。按照此方法可简化为3个特征点,再根据这3个特征点的位置及相对距离,确定较深水区中最终特征点的位置,即控制点。
3个救援平台从救援基站出发,以最快速度前往救援目的地,并且救援平台只能在外城区活动。将3个救援平台和3个控制点看成质点,与特征点构成2个不规则四边形,可看成其由4个三角形组成,如图13所示。
其中,点1,2,3分别表示一个控制点;点4,5,6分别表示一个救援平台;d1—d9分别表示三角形的边长。
为尽可能提高救援效率,即保证四边形内包含受灾重区(一般为较深水区)的面积最大,假设其面积与四边形面积成正比,比例系数为k,此时即要求得不规则四边形的最大面积。由于遥感技术等,四边形各边长及对角线已知,根据余弦定理可求得四边形的面积S。
根据海伦公式:
S=p(p-a)(p-b)(p-c),(10)
S1=p(p-d1)(p-d7)(p-d9),
p=d1+d7+d92,(11)
S2=p(p-d3)(p-d4)(p-d7),
p=d3+d4+d72,(12)
S3=p(p-d2)(p-d8)(p-d9),
p=d2+d8+d92,(13)
S4=p(p-d5)(p-d6)(p-d8),
p=d5+d6+d82,(14)
Ssum=k(S1+S2+S3+S4)。(15)
式中,p为半周长,m;a,b,c为三角形三边长,m;S1—S4分别为每个三角形的面积,m2;Ssum为较深水区的面积,m2。
3.4与常规救援模式对比
在无救援平台进行灾情点探索的情况下,由于位置局限性指挥部无法知道具体受灾情况,只能通过尽可能多的救援艇进行盲目探索性救援,直至遍历完成,得到与救援平台达到最优化位置点所获取灾情信息同样的效果,随后再有针对性展开救援。
在救援艇进行灾区范围的遍历过程中,作出如下假设:
1)位置救援艇的数量足够多;
2)采取与救援平台模型相同的60个需要救援的救援点,较深水区需救援点仍占总救援点的90%,即总共54个救援盲点,而救援点的信息没有办法通过附在救援平台上的遥感系统而获得,所以皆为盲点;
3)为了得到灾区的全部信息,需进行全部遍历,得到需要遍历时间总和。假设在此情况下进行救援点的遍历后,可以达到与救援平台相同到达聚类后的最优化点相同的救援效果。
在进行遍历的实现过程中采用遗传算法进行路径的优化改进,逐步实现遍历效果。
3.5模型实现及结果分析
以原有城市规划的路网图为基础,将整个中心城区分成2个呈环带状分布的区域。容易发生大型洪涝灾害的为中心区;而周边过渡区可能仅有浅水分布,有可能该浅水区水深无法达到救援冲锋舟吃水要求。现已知路网图的中心区边界,近似拟合边界函数,得到所需要救援的大致范围,为救援平台的移动提供了轨迹。
在拟合过程中,考虑边界过于复杂,用多项式回归很难实现,在观察了边界的大致图像之后,通过非线性拟合,得到边界函数。
1.16×10-5-5x2-1.12×10-5-
5xy-0.003 76x+1.28×10-5-
5y2-0.004 24y+1=0。(16)
在边界范围内,利用rand(0~1)分布函数,随机生成54个散点,来模拟54个救援点(54个黑色的星点)。用K均值聚类的方法,根据距离的远近,将这些点聚类为3类(3个不同色块),并得到3个聚类后最优化的控制点(红色点),结果如图14所示。
在中心边界外,设立3个救援基站,以最快的速度前往救援目的地,将3个救援平台和3个控制点看成质点,与特征点构成2个不规则四边形。
假设椭圆的函数与实际相符,以拟合的边界函数为基础,保证救援平台一直沿着边界行进,不进入城区路网,以尽快达到控制点。函数的变量为t,位置随着t而改变。
为尽可能提高救援效率,开展多目标规划。利用海伦公式计算不规则四边形的面积,在满足距离控制中心点距离相对较小且保证四边形面积最大的前提下,在matlab工具箱中进行多目标优化与规划,计算得到救援平台达到救援位置的时间为50 min。之后按照常规救援方式计算救援艇遍历所有救援点的时间,其中救援艇救援路线如图15所示[21]。
假设救援艇的移动速度与救援平台相同均为15 km/h,且救援艇的数量足够多,根据最优化的结果而变化,所有救援艇从一个固定入口出发,在不知道救援点信息的情况下进行盲目运动,以一定的规律进行逐步推进,利用遗传算法进行路径改进,最终得到完整路径,并遍历所有的救援点,全部遍历时间为3 h。旧模式若想达到新救援模式同等效果,所需时间至少为14 h。
通过新、旧2种模式的比较,新模式救援时间远小于传统救援模式。
4结语
针对目前中国在洪涝救援过程中遇到的问题,结合海滩浅水救援设备,研发设计了一套履带式洪涝灾害救援平台。该平台采用履带与轮式行走结合的行驶方案,以大小救援艇组合的救援方式在受灾区域开展人员运移及物资运输工作。
1)实现了陆上、地形复杂浅水域多作业环境正常作业。
2)保证机器正常前后行驶,并能进行一定适应角度的爬行、转弯,因机器需固定于一处,并载满受灾人员后往返于陆上与救援水域之间,须保证机器具有抗水流冲击能力以及抗腐蚀能力。
3)保证救援艇完成受灾群众陆上与水域转移,实现大艇在水中升降,自由进出平台。
履带式救援平台具有灵活机动性高、安全可靠稳定的优点,为洪涝灾害救援提供了新的方式,拓宽了洪涝灾害研究的专门化领域。该救援模式可直接应用于洪涝受灾地区,也可推广应用于海滩旅游景区,适合小型快艇、飞艇以及游船停泊作业,开展游客往返沙滩与浅海的运移工作。
目前本研究已完成理论计算与可行性分析,但仍存在2个问题:一是研究尚处于理论研究階段,并未开展试验测试;二是未充分考虑所设计救援平台的搭建与应用成本。后期需在该研究基础上,对所遗留问题进行持续研究,在保证设计可行性与救援效率的基础上尽可能降低成本,开展样机制造与试验测试分析,以进一步论证所设计平台与所提出救援模式的可行性。
参考文献/References:
[1]宁思雨,黄晶,汪志强,等.基于投入产出法的洪涝灾害间接经济损失评估——以湖北省为例[J].地理科学进展,2020,39(3):420-432.
NING Siyu,HUANG Jing,WANG Zhiqiang,et al.Indirect economic losses of flood disaster based on an input-output model:A case study of Hubei Province[J].Progress in Geography,2020,39(3):420-432.
[2]李成,陈晓东.冲锋舟在救援抢险中的作用、不足与对策[J].中国应急救援,2014(1):28-29.
[3]李明杰.关键消防装备在洪涝灾害救援处置中的应用[J].今日消防,2020,5(5):20-21.
[4]朱志祥.洪涝灾害抢险救援关键技术[J].安全,2018,39(7):45-47.
ZHU Zhixiang.Research and thinking on key technologies of rescue of flood disasters[J].Safety,2018,39(7):45-47.
[5]张静.履带起重机臂架稳定性研究[D].大连:大连理工大学,2009.
ZHANG Jing.Stability Analysis of Crawler Crane Boom[D].Dalian:Dalian University of Technology,2009.
[6]刘延俊.液压与气压传动[M].北京:清华大学出版社,2010.
[7]刘世亮.挖掘机液压系统节能控制的分析研究[D].兰州:兰州理工大学,2009.
LIU Shiliang.Research and Analysis on Energy-Saving Control of Hydraulic System in Hydraulic Excavator[D].Lanzhou:Lanzhou University of Technology,2009.
[8]GB/T 3871.15—2006.农业拖拉机试验规程第15部分:质心[S].
[9]GB/T 7586—2008.液压挖掘机试验方法[S].
[10]孔德文,赵克利,徐宁生.液压挖掘机[M].北京:化学工业出版社,2007.
[11]GB/T 1147.1—2007.中小功率内燃机第1部分:通用技术条件[S].
[12]曹永升,史勋汉,孙为志,等.阴极保护在海洋平台上的应用[J].化学工程与装备,2013(8):180-181.
[13]王世军,赵金娟.机械工程中的有限元方法[M].北京:科学出版社,2019.
[14]刘鸿文,吕荣坤.材料力学实验[M].北京:高等教育出版社,2017.
[15]贺继艳,张立刚,王南.天津城市轨道交通网络的区域救援模式[J].城市軌道交通研究,2017,20(12):14-17.
HE Jiyan,ZHANG Ligang,WANG Nan.Regional rescue mode based on Tianjin urban rail Transit network[J].Urban Mass Transit,2017,20(12):14-17.
[16]冯锐,张玉书.洪涝灾害遥感救援系统[J].气象,2002,28(12):47-50.
FENG Rui,ZHANG Yushu.Remote sensing and rescue system of flood disaster[J].Meteorological Monthly,2002,28(12):47-50.
[17]袁冯.北京市暴雨分布规律与洪涝灾害风险评估研究[D].北京:北京建筑大学,2020.
YUAN Feng.Study on the Distribution of Rainstorm and the Risk Assessment of Flood Disaster in Beijing[D].Beijing:Beijing University of Civil Engineering and Architecture,2020.
[18]郭利华,龙毅.基于DEM的洪水淹没分析[J].测绘通报,2002(11):25-27.
GUO Lihua,LONG Yi.Analysis of flood submerging based on DEM[J].Bulletin of Surveying and Mapping,2002(11):25-27.
[19]李红英.基于GIS的洪灾损失评估研究——以黑河为例[D].西安:西安理工大学,2007.
LI Hongying.Flood Damage Loss Assessment Based on GIS:For Heihe as an Example[D].Xi′an:Xi′an University of Technology,2007.
[20]敬建军.陆军师参加洪涝灾害救援时的卫勤保障研究[D].广州:第一军医大学,2000.
JING Jianjun.Study on the Health Service Support During the Army Division Participating in Disaster Ssistance About Flood and Waterlogging[D].Guangzhou:First Military Medical University,2000.
[21]哈达,刘永利,沈先耿.基于应急救援路径规划选择的研究[J].电子世界,2016(21):66.
