基于虚拟环境的“机器人视觉技术及应用”在线教学改革与实践
2021-09-17钱丹阮殿旭朱红萍
钱丹 阮殿旭 朱红萍
(沙洲职业工学院,江苏 张家港 215600)
引言
根据《2020年春季学期延期开学期间在线教学工作方案》总体部署和《关于春季延期开学期间教学安排调整与实施在线教学工作的通知》的实施要求,“机器人视觉技术及应用”课程教学团队,化“危”为“机”,依托网络教学平台,做好“停课不停教、停课不停学”工作,将在线教学引入机器人视觉技术及应用课堂教学体系,为虚实结合的机器人视觉技术的课程教学改革提供了新思路。[1-3]在传授知识的同时,注重培养学生的自主学习能力;注重实施效果,精准分析学情,对学习质量进行诊断评估,有针对性地制定在线教学计划,利用信息化手段,确保线上教学与线下教学同质等效。
1 课程教学改革设计
1.1 课程概要
“机器人视觉技术及应用”课程是工业机器人技术专业的一门专业核心课程,结合工业机器人应用编程“1+X”职业技能等级标准的考核要求,培养学生综合运用电气、控制、传感等相关专业知识与技能,使学生在掌握工业机器人应用系统建模、离线与仿真编程及现场编程的基础上,进一步学习机器人视觉通信应用程序编调、通信参数设置,完成视觉引导的机器人工作站典型项目任务,为今后从事工业机器人操作、运维、管理及技术改造奠定基础。
1.2 教改主题
构建以学生为主体、虚拟编调相结合的双主线课堂生态系统[4],如图1所示。
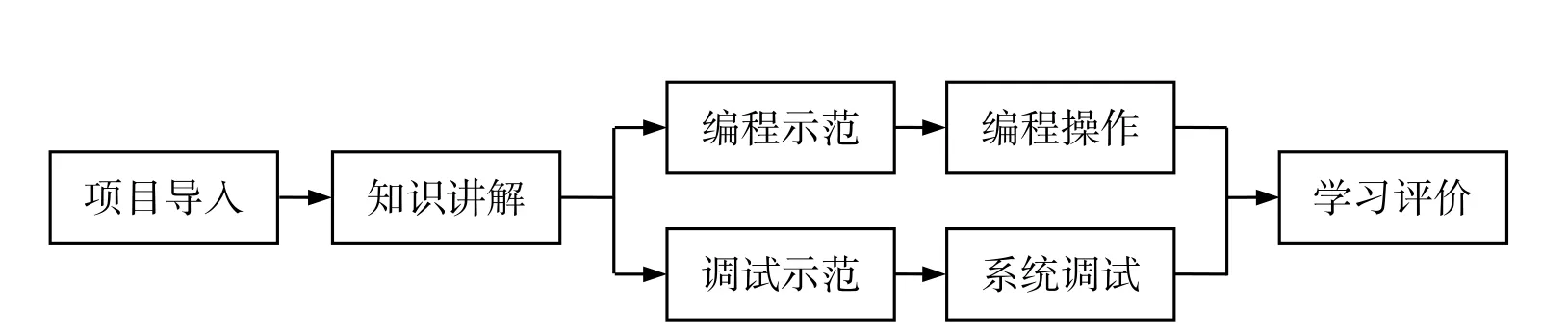
图1 虚拟编调双主线
2020年新冠疫情期间,教学团队以“基于视觉引导的机器人搬运工作站”为项目,结合知识和技能的双任务驱动形式,整合线上理论知识和线下工作过程,利用腾讯课堂、智慧职教云、QQ群等平台作为传授知识的载体,将项目作为锻炼技能的载体,实现“学中练、练中学”。线上是基于平台资源的自主学习,线下进行项目实施,项目按任务设置分配课时(见表1)。教学过程中学生的主体作用得到充分呈现,教师也真正成为课堂的组织者和学生学习过程中的引导者。
1.3 教学设计
依照“机器人视觉技术及应用”的课程目标和新冠疫情期间纯线上教学情况,教学团队制定线上线下详细的项目清单和学习要求,如表1所示,以“基于视觉引导的机器人搬运工作站”项目为例,学生需完成图像集的标定及目标(药盒)识别与定位、视觉与机器人通信编程与调试、静态药盒的搬运示教编程与调试三个任务。

表1 “基于视觉引导的机器人搬运工作站”项目实施过程
2 课程教学改革实践
2.1 课堂组织
采用基于理论和实践双重驱动模式下的递进式教学组织课堂。
以项目式任务驱动教学,由两条主线引领:一方面是学生自主完成课程核心知识点的理论学习;另一方面是依照项目操作流程,完成知识点、技能点层层递进,强调活学活用。
整个线上教学实施过程中,强化“课前预习”+“课中讨论”+“课后思考”的教学流程和监控。项目任务开始前,教师在课前布置相关理论知识点,学生充分利用线上信息化教学资源进行预习,并完成一定量的预习测试题。线上直播课堂上,教师结合课前学生预习效果,整理其中的重点、难点,并结合项目任务展开讨论。整个课堂教学中,教师引导学生自主探究式学习,如图2所示。课后学生结合课中所学,完成教师布置的作业,并提交到教学平台,与同学分享学习成果。

图2 线上直播课堂
在整个教学实施过程中,加强本课程的教学流程痕迹化管理,每日一记录,三天一总结,每周一测评。整个教学过程中的任务发布和处理均在平台上进行,因此,对学生学习的轨迹和学习效果能进行实时过程监控。同时,为了让学有余力的学生拓展延伸所学的知识和技能,线上还提供了相关交叉学科的知识点视频资源,如图3所示。此外,教师定期在线上开设讨论社区,增加师生互动环节,使师生能随时随地互动探究。
2.2 教学成效及反思
新冠疫情期间,本课程以学生为中心,引入线上教学,从课程教学理念、教学内容、教学方法、考核形式等方面进行课程教学改革。以在线课程平台为载体,通过线上线下相结合的混合式教学方法,将理论和实践相结合。但在线上教学过程中还存在一些不足,如对学生线上课堂无法实时监控、在线分组空间受限、师生课堂互动不直接等,还需要进一步探索与实践。
3 结语
实践证明,基于虚拟环境的“机器人视觉技术及应用”在线教学改革,响应了国家“停课不停教、停课不停学”的号召,顺应了“互联网+职业教育”时代背景下的课程在线教与学的需求,化“危”为“机”,激发教师和学生持续教与学的热情,充分利用信息化手段,构建双主线课堂生态系统,细化项目清单和学习要求,发挥主观能动性,确保线上教学与线下教学同质等效。基于虚拟环境的“机器人视觉技术及应用”在线教学改革和实践过程中取得的经验,也将对其他课程的在线教学改革起到一定的借鉴作用。