智能循迹车设计在新工科创新驱动教学应用浅析
2021-09-16殷帅苏士田徐伟田婷
殷帅 苏士田 徐伟 田婷

摘 要:本文针对现有的单片机教学课程中大学生创新性和工程素养难以培养与课程创新教学方法不足的问题,提出了一种适用于大学生单片机教学的智能寻迹车的创新教学案例设计,给出了教学用智能车软硬件设计,探索了教学案例的实施。该教学过程的实施充分培养了学生的工程开发能力,锻炼了学生的程序独立调试能力,为培养创新型人才提供了一个新思路。
关键词:新工科 创新驱动教学 案例式教学 智能车设计
中图分类号:G642.0 文献标识码:A文章编号:1674-098X(2021)05(b)-0205-04
Application of Intelligent Tracking Car Design in Innovation Driven Teaching of New Engineering Disciplines
YIN Shuai SU Shitian XU Wei TIAN Ting*
(School of Mechanical and Electrical Engineering, Zaozhuang University, Zaozhuang, Shandong Province, 277160 China)
Abstract: In view of the existing single-chip microcomputer teaching course, it is difficult to cultivate college students' innovation and engineering literacy, and the lack of innovative teaching methods. This paper studies an innovative teaching case design of intelligent tracing vehicle which is suitable for college students' single chip microcomputer teaching, gives the software and hardware design of intelligent vehicle for teaching, and explores the implementation of teaching case. The implementation of the teaching process fully cultivates the students' ability of engineering development, exercises the students' ability of independent program debugging, and provides a new idea for the cultivation of innovative talents.
Key Words: New engineering disciplines; Innovation driven teaching; Case teaching; Intelligent car design
高等教育要求教師必须把握社会要求和受教育者的成长与发展规律,有目的、有计划、有组织地对受教育者施加影响,从而把大学生培养成为符合社会需要的接班人。习近平总书记在2018年6月中央外事工作会议上明确指出:“当前,我国处于近代以来最好的发展时期,世界处于百年未有之大变局,两者同步交织、相互激荡。”为推动创新驱动的发展,国家提出了一系列以大数据、工业物联网、量子计算等为代表的新兴科技趋势,面对新的发展趋势,高等教育迫切需要进行新工科创新驱动教学研究。传统教学方法的不足,要求教师必须针对学科交叉融合教学、工程技术素养提高提出新的改革创新理念和思路[1]。
单片机实训教学作为一门理论联系实际非常强的一门课程,笔者在该课程的教学过程中发现,现有的讲授式教学方式对培养学生的创新能力、工程素养非常被动,背离了当前提出的新工科教育方式[2-3]。在单片机设计中,寻迹车的设计与制作[4]涉及到车辆工程、机械工程、信息通信、控制工程等多种学科,通过组织制作寻迹车可以锻炼授课学生独立编程的能力,可以增强学生对各学科之间的融会贯通能力,增强学生的动手能力以及发现问题并有目的地解决问题的能力,真正实现理论与实践相结合[5]。基于此,笔者结合大学生科技竞赛,设计了一项基于STM32单片机控制的智能循迹车教学设计与开发教学案例。
1 教学案例内容
对于智能循迹小车而言,必须在机械、电路以及程序方面等多个方面做到紧密的设计与配合,才能制作出比较好的竞速循迹赛车[6-8],因此,该案例的实施不仅锻炼了学生的单片机独立编程能力,还对锻炼学生的学科交叉融合能力、动手能力等均有很强的教学带动作用。
1.1 教学案例总体设计
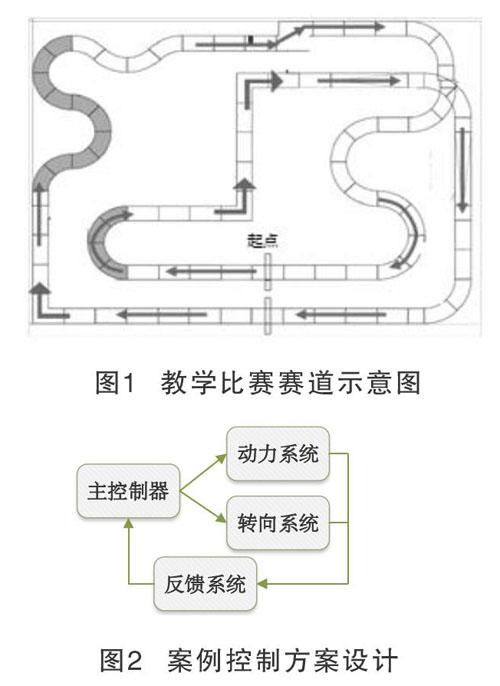
给出的教学案例设计目的是为了提高学生的编程能力,在考虑调试复杂度的情况下,这里给出智能车循迹赛道任务图。循迹智能车从起点处出发,在以不出赛道的前提下跑完一圈为设计目标,最终竞赛时用时最短者成绩最优。赛道的基本元素主要有直线赛道(含桥梁)、半径为600mm的波浪形弯道、半径为450mm的马蹄形弯道、半径为900mm的大弯、变道以及直角弯赛道构成,教学过程中设计的教学用赛道如图1所示。赛道黑色PVC板作为路面住材质,在赛道两边分别设置有30mm宽度的白色路肩,赛道中间设置有20mm宽的白色中线,白色中线两边分别设置有10mm宽的过渡带。
1.2 教学案例控制方案设计
智能车的控制主要包括动力系统和转向系统两项,该两项内容均由单片机实现整车的闭环控制,在整车闭环控制系统中,主要包括动力系统闭环控制和转向系统闭环控制。智能车动力系统闭环控制通过编码单元采集当前车速,反馈到控制单元,单片机在采集完转速信号后,并与预设值进行比较,将差值信号通过PI计算,输出当前转速下的PWM信号驱动执行电机的旋转;转向系统通过红外对管检测当前转角并反馈给控制单元,与动力系统一样,将差值信号通过PD计算,输出不同占空比的控制信号驱动舵机打角。整车通过动力系统和转向系统的闭环控制进而实现整车的闭环控制。教学案例控制方案设计如图2所示。
1.3 教学案例硬件结构设计
教学案例中,硬件内容主要包括以KT板制作的智能车车身、以STM32F407IGT6单片机为最小系统的控制电路、以电机和舵机的驱动元件、以E6A2-CS3C编码器为速度检测元件、以分立元件和LM350等构成的电机和舵机驱动电路和电源电路,以红外对管的道路识别电路,以ST-Link仿真器为程序下载器的智能车硬件结构。由于电机等电感元件的存在,智能车电源工况较为恶劣,要求学生在外部电源前端添加一个EMI滤波器电路,对电源中的共模噪声进行抑制。智能循迹车的硬件整体结构图如图3所示。
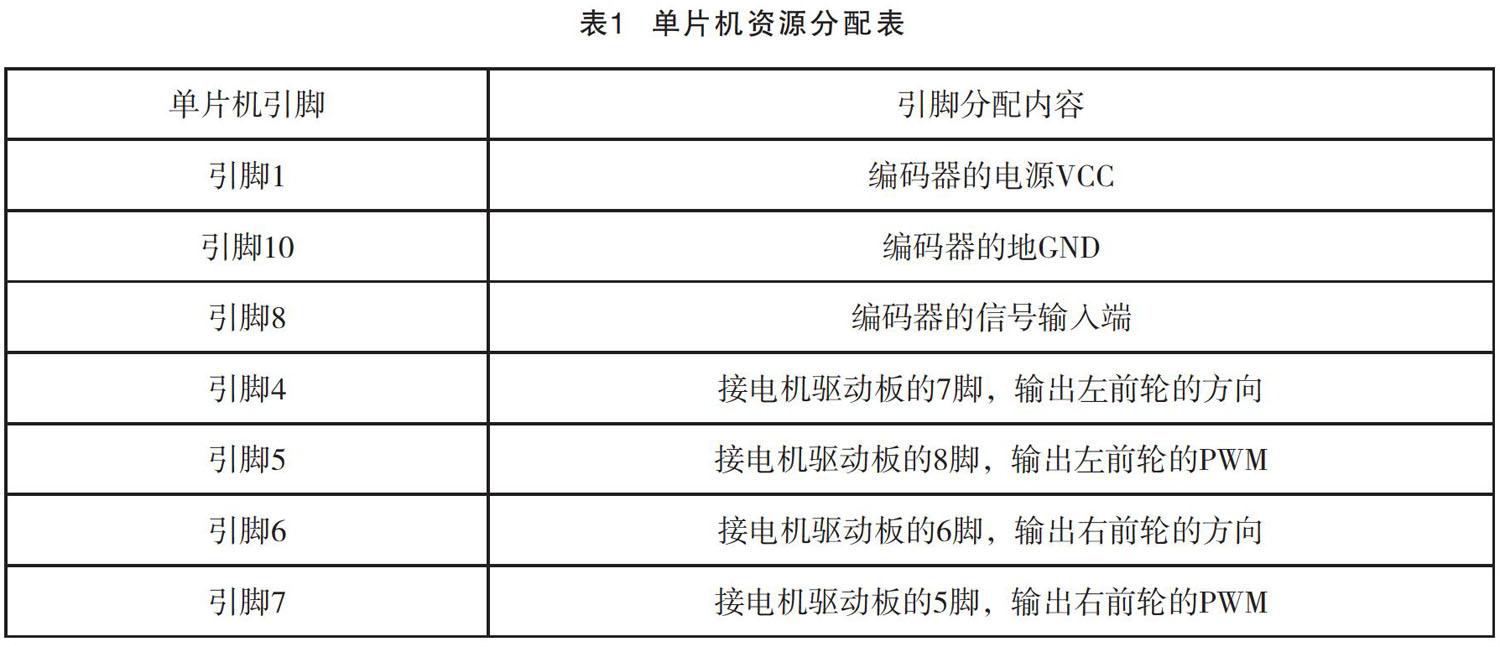
1.4 教学案例单片机资源分配
单片机资源分配如表1所示,经实验验证,STM32单片机的PWM输出模式采用单脉冲模式,该模式通过一个激励启动计数器,在一个程序可控的延时之后产生一个脉宽可编程控制的脉冲,在输出比较模式和PWM模式下生成占空比可调的PWM波形。电机的控制周期为1ms是比较合适的,但是由于硬件的限制,接口上提供的是TIM3来确定后面2个驱动轮和舵机的周期。所以本设计采取的是用TIM0提供1ms的计时中断,用TIM3的同步复位PWM方式,采取16ms的周期提供后轮电机的驱动控制。
STM32高级控制定时器有编码器接口模式,在模型车硬件电路板设计过程中,用输入端TI1作为编码器的输入接口,通过设置STM32单片机内部的TIMx_SMCR寄存器中的SMS=010,实现单片机在TI1的边沿计数。
1.5 教学案例程序设计
针对教学案例要求,要求授课学生按照如图4所示的程序流程图设计程序。要求授课学生所编写的程序具有参数设置和存储的功能,学生可以通过调用赛车存储的参数决定正式比赛参数。待学生调取参数完毕,学生需将赛车放入赛道,赛车通过红外对管检测发车闸门是否开启,如果没有开启继续等待。当检测到比赛闸门开启时,授課学生设计的赛车正式进入比赛环节,控制程序通过判断预先设计的标志位决断赛车当前运行在无标志位的普通赛道、直角赛道、换道赛道和停止线。当程序检测到直角弯标志位时,赛车立即进入直角弯处理子函数,此时赛车开始减速,然后大角度转弯,待检测到赛道后退出直角转弯模式;当控制程序检测到换道标志位时,此时赛车进入换道处理子程序,这时赛车开始减速,然后向换道方向小幅度打一定角度,在检测到赛道后,完成换道控制,进入到无标志位的普通赛道巡线处理子程序;当控制程序检测到停止线时,控制程序停止电机PWM信号和舵机PWM信号的输出,完成比赛。
2 教学案例实施过程
在教学案例实施过程中,首先需要准备教学场地和教具的准备。教学场地一般控制在150m2较为合适,教学场地的前半部分设置实验工作台,放置必须的实验元器件及常用工具等,实验场地后半部分铺设调试和比赛的赛道。由于要求授课学生自主完成赛车程序的撰写与调试,这里使用的教学教具主要包括STM32主控板、驱动电路板、舵机、电机、车身制作KT板下载线等。
在授课过程中,对于教学案例中设计的几种不同类型的赛道,要求学生根据不同赛道设计不同的控制方法。在直线型赛道中,寻迹车特点是不需要进行频繁的加减速和变向,学生可以通过PID闭环控制,提高车速,减少全程通过时间。但是,由于直线型赛道是所有不同赛道间的衔接部分,起到承上启下的作用,无论过快或过慢,一旦控制的不好就会对后面的各个赛段的处理造成不利的影响;且在其他赛道间的换道过程中,即使并没有真正的直线型赛道存在,也会在存在瞬间进入一段可视为短距离直道的情况。所以在整个直道模式中,要求授课学生采用偏移量滤波算法进行较小幅度的调整角度,而对偏离程度比较大时,则进行有阶梯层次的大幅调整,以进入弯道模式。
对于半径为450mm、600mm、900mm的3种弯道,要求授课学生设计采用三阶梯分段处理程序,分别对应程序的stage1、stage2和stage3。每一个阶梯对应程序有不同的舵机角度,角度调试是后期学生课程调试的关键。
直角弯道,是所有赛道中独立来看难度最大的一种赛道类型。因为首先必须在探测到直角标记后就要减速,一旦达到直角处则需要在极短的前行距离内迅速做出幅度达90°的转弯,并且要保证在转弯完成后能够在最短时间内回到正确的运行轨道,无论对于车辆的机械性能(这里主要是舵机性能)还是程序都是一大考验。直角的通过速度较之于弯道要更低,但是也因此这里常常成为全程整体平均速度无法达到一个较高水平的瓶颈所在,往往在其他的赛段提高到一个更高的速度时,到达直角弯就要求必须更快、更大幅度减速,当出现连续直角弯时,这种频繁加减速带来的影响更是尤为明显。变道的处理也是对授课学生工程素养能力的一项重要考验。智能车在变道过程中,可以先小幅度预先打角度,这样处理后就不用大幅度减速,大大优化了变道处理程序。
3 结语
在单片机教学过程中通过采用实际的案例式教学,锻炼了学生发现问题、分析问题、解决问题的能力,而且丰富的教学案例可以有效提高学生的学习兴趣和动手能力,该教学方法对培养新工科下具有创新能力的大学生具有一定的参考意义。
参考文献
[1] 李敏,张西龙,陈秀峰,等.基于开放式的大学课堂教学模式创新研究[J].产业与科技论坛,2020,19(16): 199-200.
[2] 朱君,宋树祥,秦柳丽,等.“新工科”创新理念的电子信息类专业基础实践教学改革[J].实验技术与管理,2017(11):171-174.
[3] 俞斌,贾雅琼,李欣,等.新工科背景下地方本科院校电子信息类专业核心课程混合式教学团队建设研究与实践——以湖南工学院《信号与系统》课程教学团队为例[J].文化创新比较研究,2020,4(14):142-143.
[4] 李鑫,范英,杨金鑫,等.智能车路径识别算法研究[J].太原科技大学学报,2020,41(1):32-36,40.
[5] 肖海宁,王福元,袁健,等.面向应用型人才培养的单片机教学改革思考与探索[J].科技风,2020(31):58-59.
[6] 马光军.基于图形化编程的智能小车循迹控制教学案例设计[J].科教导刊:电子版,2019(2):94.
[7] 周斌.基于强化学习的智能汽车自主换道方法研究[D].长春:吉林大学,2020.
[8] 郑震.室内智能小车定位技术研究[D].大连:大连理工大学,2020.
