饮水机水桶自动换取机械手结构设计*
2021-09-15马晟哲蒋东霖
马晟哲,蒋东霖
(长春师范大学 工程学院,吉林 长春 130032)
0 引 言
在日常生活中,立式饮水机因其价格便宜,操作简单方便在学校、办公室等场合普遍存在。饮水机的桶装水容量范围为3~20 L,家庭、办公室常用的桶装水一般为18.9 L,重量大约是20 kg。在饮水机换水的过程中,需要将水桶抬升至饮水机的上方,且将饮水机旋转使其出水口朝下,插入饮水机水槽中。通过调查表示,对于1.7 m的成年男子来说,饮水机的换取工作是稍费劲的,而对于年纪偏大的中年人甚至老年人来说,换水工作是很不方便的,而且还有拉伤腰部、手部的风险,而小孩则根本无法换水。
针对上述存在问题,笔者提出了一种饮水机水桶自动换取机械手的结构设计方案,通过设计机械手的结构组成、原理及各部件的型号选择,设计了该装置并证实了其可靠性,解决了人力换水困难的问题,实现了饮水机水桶换取的自动化。
1 结构组成及工作原理
饮水机水桶自动换取机械手搭载在车体上,车体部分长900 mm、宽600 mm,高550 mm,该型号的主执行端初始高度为630 mm,执行高度为1 450 mm。整体由主执行端、旋转机构、平移升降机构、副执行端四个部分组成。如图1所示为产品总体预览图。
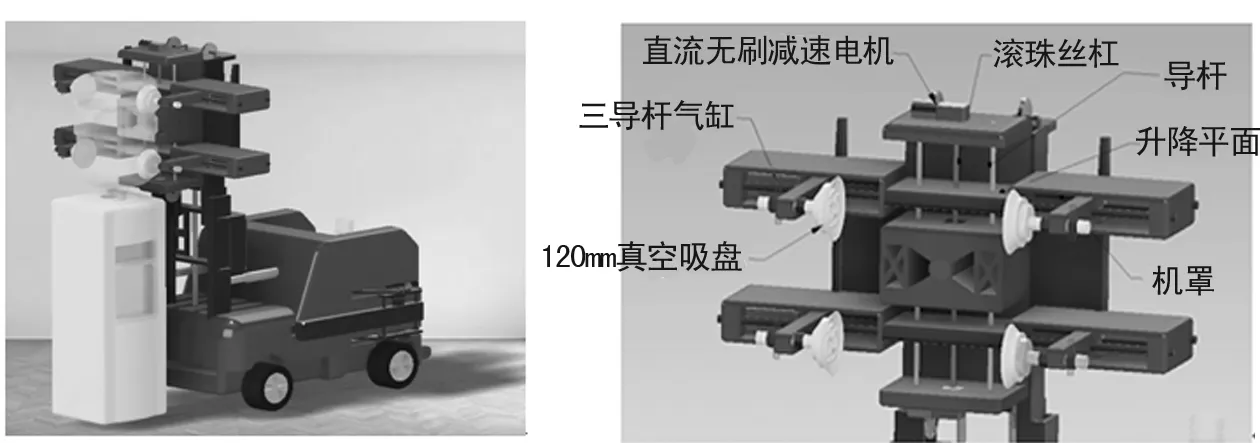
图1 饮水机水桶自动换 图2 主执行端抓取机构 取机械手预览图
此产品包含执行端机械手的设计,以及各个辅助完成整个功能的运动系统,通过各个部件的协调配合实现饮水机水桶的换取。装置工作过程中,小车运行至饮水机位置,主执行端部件通过平移升降机构移至抓取水桶的合适位置,并通过气缸移动真空吸盘,使吸盘牢固吸附水桶表面。升降机构开始抬升水桶,同时旋转机构工作,旋转主执行端,将水桶的出水孔朝下,并升至最高处[1]。小车移动,调整位置,对准饮水机的水槽后,主执行端下降,使得水桶成功安装在饮水机上,平移升降机构配合小车反方向运动,撤出机械爪完成水桶换取。
饮水机上存在空水桶时,装置首先取下空水桶将其立于地面,此时车体旋转,调整位置,对准车体尾部,副执行端通过齿轮齿条配合移动到合适的位置,舵机爪工作实现空水桶的抓取,并将其运送至车体的后备箱中。完成饮水机水桶的安装后,可带着空水桶离开。
2 结构设计分析
2.1 主执行端
主执行端由妙德PFG120 mm真空吸盘、亚德客三杆气缸、160 mm滚珠丝杠、滑动导杆等一系列固定件组成。能够实现X、Y轴两个方向的位置微调,X轴方向单边70 mm的位置调整,Y轴单边实现160 mm的位置调整。主执行端以轴为中心建立中心云台,云台上下方通过固定竖直方向的丝杠与滑动导轨,实现执行端沿Y轴移动,在中心平面上下各分布一对可沿X轴方向移动的真空吸盘,通过外壳固定气缸,整体可沿导杆移动,进而吸附物体[2]。气缸为三轴三杆带导杆气缸,实现吸盘的移动与固定。如图2所示为执行端的机构简图。中心云台长250 mm,高150 mm,上顶面至下底面长530 mm,主执行端左侧至右侧长度910 mm,整体可绕中心轴旋转。
2.1.1 真空吸盘选型
执行端设计以真空吸盘吸附水桶,设水桶重量为20 kg,约产生196 N的力。设计以4个真空吸盘。拟通过公式(1)~(3)确定吸盘理论值大小。
W=C×P×0.1×F
(1)
式中:W为吸附力,N;C为吸盘面积,cm2;P为真空压力,kPa;f为安全系数(水平悬挂为1/4以上,垂直悬挂为1/8以上);设吸盘半径为R,故吸盘面积C有公式(2):
C=πR2n
(2)
通过公式(1)、(2)联立可得公式(3):
(3)
结合公式,W=196 N,垂直吸附重物安全率t=8%,吸盘内的真空度P=0.05 MPa=-50 KPa,吸盘的真空度安全系数为Pv=80%,吸盘数量n=4个。计算得吸盘直径为120 mm。综合选择FSTE PFG120真空吸盘。
2.1.2 气缸选型
如表1所示为气缸出力表,设计采用4个气缸移动真空吸盘,故P=0.5 MPa的情况下,选用缸径为12 mm的气缸,单个气缸理论输出力为55.37 N。综合考虑最终选用亚德客缸径为12 mm,行程为70 mm的三轴三杆带导杆气缸。

表1 气缸出力表 /N
2.1.3 丝杠型号
根据丝杠直径与载荷关系,执行端丝杠安装方式为固定-自由式安装(通常为垂直方向)。该安装方式能够适用于高精度中转速的场合,有效减少轴承由于热效应产生的应力[4]。一端由两个角接触轴承固定,另一端自由。选型过程,单边轴向负荷定为300 N(水桶及材料自重),安装间距160 mm,故直径大小在6 mm以上符合要求,综合选择直径10 mm的丝杠,行程为160 mm。
2.2 旋转机构
旋转机构由新永泰直流无刷减速电机驱动、GFC-25×30联轴器、V带输入、滚珠轴套组成。旋转机构的主动件为直流无刷减速电机,电机运作旋转输出,通过联轴器传递扭矩,V带传输扭矩给主执行端主轴,主轴与轴套连接主执行端,轴套与升降机构第三阶机架通过滚轮接触。
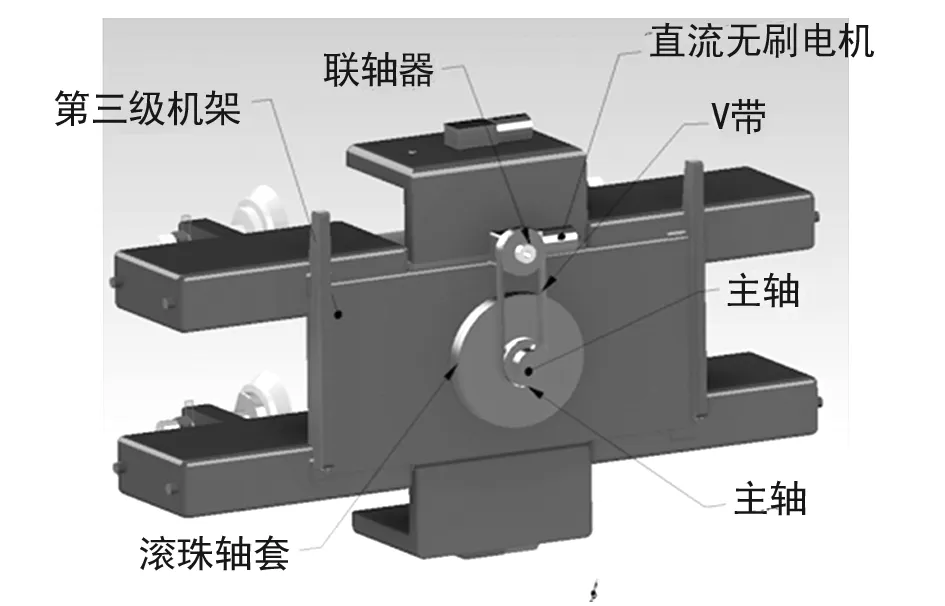
图3 旋转机构
2.2.1 电机选型
选用的新永泰直流无刷减速电机,功率为31 W,额定电压12 V,额定电流为0.8 A,减速比为200,空载转速为20 r/min,负载最高转速为15 r/min,带动执行端4 s旋转一圈,能够保证桶装水稳定的旋转。额定转矩为29 kgf.cm,即约为2.9 N.m,能够转动桶装水以及主执行端机构。
2.2.2 带轮及联轴器选型
为了充分利用装置空间,保证传动的准确性,设计中将电机安装在升降机构的第三阶机架上,电机中心与主轴中心距离150 mm,故采用带传动的设计完成旋转机构的功能,传递扭矩[5]。通过比对型号,GFC-20×30、GFC-20×25与GFC-25×30符合安装尺寸且适用于电机额定功率。GFC-20×30与GFC-20×25额定扭矩为2.8 N.m,GFC-20×25额定扭矩为6N.m。为保证安全性,综合选择GFC-25×30联轴器,其外径25 mm,长度30 mm,质量为33g。
联轴器上安装带轮内径25 mm,外径60 mm,安装过程中,将带轮套在联轴器上,通过联轴器上的顶丝固定带轮。主轴带轮内径40 mm,外径60 mm。V型带轮型号IN×2 215 10×475,宽带为8mm,凹槽角为34°,深度11 mm。带轮传动比为1,电机传递给主轴的扭矩为2.9 N.m,转速为15~20 r/min。
2.3 平移升降机构
平移升降机构由带滑轨的三阶机架、液压缸、v型带轮、滚子链组成。升降机构一阶机架高为550 mm,二阶机架长度630 mm,三阶机架长度256 mm。车体前端有移动滑轨,机架通过液压缸可实现水平方向的移动,可移动长度为240 mm。第一级机架与滑轨配合,平移液压缸推动第一级机架在车体前端前后移动。第二阶机架通过升降液压缸实现抬升。第三阶机架与第二阶机架通过滑轨配合,在滚子链的拉升下,升降主执行端。滚子链轮子齿数为27,链节数为170,铰链两端固定在第二阶机架上,可在第二阶机架抬升时,同时抬升主执行端。

图4 平移升降机构
2.4 副执行端
副执行端辅助主执行端完成整个饮水机的换取过程。副执行端是由达盛DS3225舵机、金属抓手构成的舵机爪,齿轮、齿条构成的平移机构以及可旋转的传送带。副执行端的行程为600 mm,舵机可控角度为0~180°副执行端通过舵机爪抓取空水桶,舵机爪两端通过齿轮啮合,执行端部位由可旋转的履带组成。抓手两端各有一个舵机,可旋转履带,将空水桶略微抬升。副执行端可通过齿轮齿条机构移动,将空水桶放于后备箱。
达盛DS3135型号的舵机。其工作电压为5 V,待机电流4mA,空载转速为0.15s/60°,堵转电流为1.9A,可工作的角度为0°~180°,负载扭矩为2.1 N.m,可正常抬升空水桶。舵机一是用于驱动齿轮旋转,通过齿间啮合带动夹爪,完成抓取作用,二是驱动履带,通过履带与桶间的摩擦力略微提升空水桶[6]。所选用的舵机型号能够满足工作需求。

图5 副执行端抓取机构
3 设计应用效果
该设计能够有效实现饮水机水桶的自动换取,为用户换水提供便利。在工作过程中,小车可灵活运行至饮水机位置,进行定位。平移升降机构模拟叉车工作方式能够移动执行端至抓取位置,其三级机架可供二级抬升,在保证升降高度下,可减小占地空间。主执行端通过气缸移动真空吸盘,在各个方向可准确的调整位置,可适应多种型号的水桶换取。各部件易于安装,可及时更换或维修相应的部件,操作过程简单,适用人群广泛,可推广至多种场合,免去人力负担。
4 结 语
该设计综合考虑了立式饮水机使用过程中存在的问题,以及市面上桶装水的规格尺寸,提出了饮水机水桶自动换取机械手的总体设计方案,设计了主执行端、旋转机构、平移升降机构、副执行端以完成换水流程,分析计算了各个部件的型号参数与设计指标以确保整体结构的可行性。该装置为桶装水的换取提供了便捷的新方式,为用户提供了便利。
