基于VR的花生覆膜播种机仿真试验平台开发
2021-09-12刘圣民尚书旗王东伟何晓宁刘兵杨文卿
刘圣民 尚书旗 王东伟 何晓宁 刘兵 杨文卿


摘要:针对大型农业装备设计过程中存在参数调节困难、拆装难度大、设计成本高、工作危险性等问题,以大型农业装备4垄8行花生覆膜播种机为对象,通过Idea VR创作引擎虚拟现实开发工具,设计开发了集机具虚拟拆装、虚拟操作演示、参数仿真调节等于一体的仿真试验平台。结果表明,该试验平台的成功应用可以缩短农业装备研发设计周期,同时搭建的场景可以用于学生试验教学和实训,帮助加深认知,降低试验教学成本,减少实训风险。
关键词:VR;花生覆膜播种机;仿真;试验平台
中图分类号: S223.2;S223.5 文献标志码: A 文章编号:1002-1302(2021)14-0188-06
虚拟现实(VR)技术以计算机技术为核心支持,通过虚拟现实软件工具生成具有逼真的视觉、触觉、听觉和其他感官感觉的虚拟环境[1]。随着计算机硬件的不断更新和软件水平的逐步提高,VR技术的发展步入了快车道,其在3D游戏开发、医疗诊断、科学研究、教育教学等领域的应用不断深入,并取得了一系列成果[2-6]。而将VR技术应用到农业机械与装备上,可以帮助涉农专业尤其是农业机械领域大学生加深学习认知,同时可以实现对农机手的培训和考核,使得VR技术成为现代农业装备仿真研究发展的重要方向之一。
随着科学技术的不断发展进步,农业逐渐与信息行業相互融合,农业装备数字化设计技术研究需求越来越大。农业作为国民经济的重要基石,其中种植业是农业的一大支柱,播种则是种植业生产作业的重要一环。播种机作业性能直接影响播种作业质量。青岛农业大学研制的2BMF-4/8型花生覆膜机是一种可折叠式的大型花生覆膜联合作业机械,可以对花生进行大宽幅覆膜播种。该播种机突破了1垄2行等小幅播种模式,增加了排种单体和仿形机构,解决了单体运动干涉与仿形问题,实现了4垄8行超大宽幅花生播种[7]。同时该机可一次性完成播种前筑垄,过程中施肥、播种,过程中喷药,滴灌带铺设,播后展压覆膜、膜上覆土等作业,在运输过程中,可以同时实现两侧播种机框架的平行折叠[8]。该播种机结构复杂,功能多种多样,选择该机型作为研究载体意义重大。其整体结构示意见图1。
1 场景平台搭建
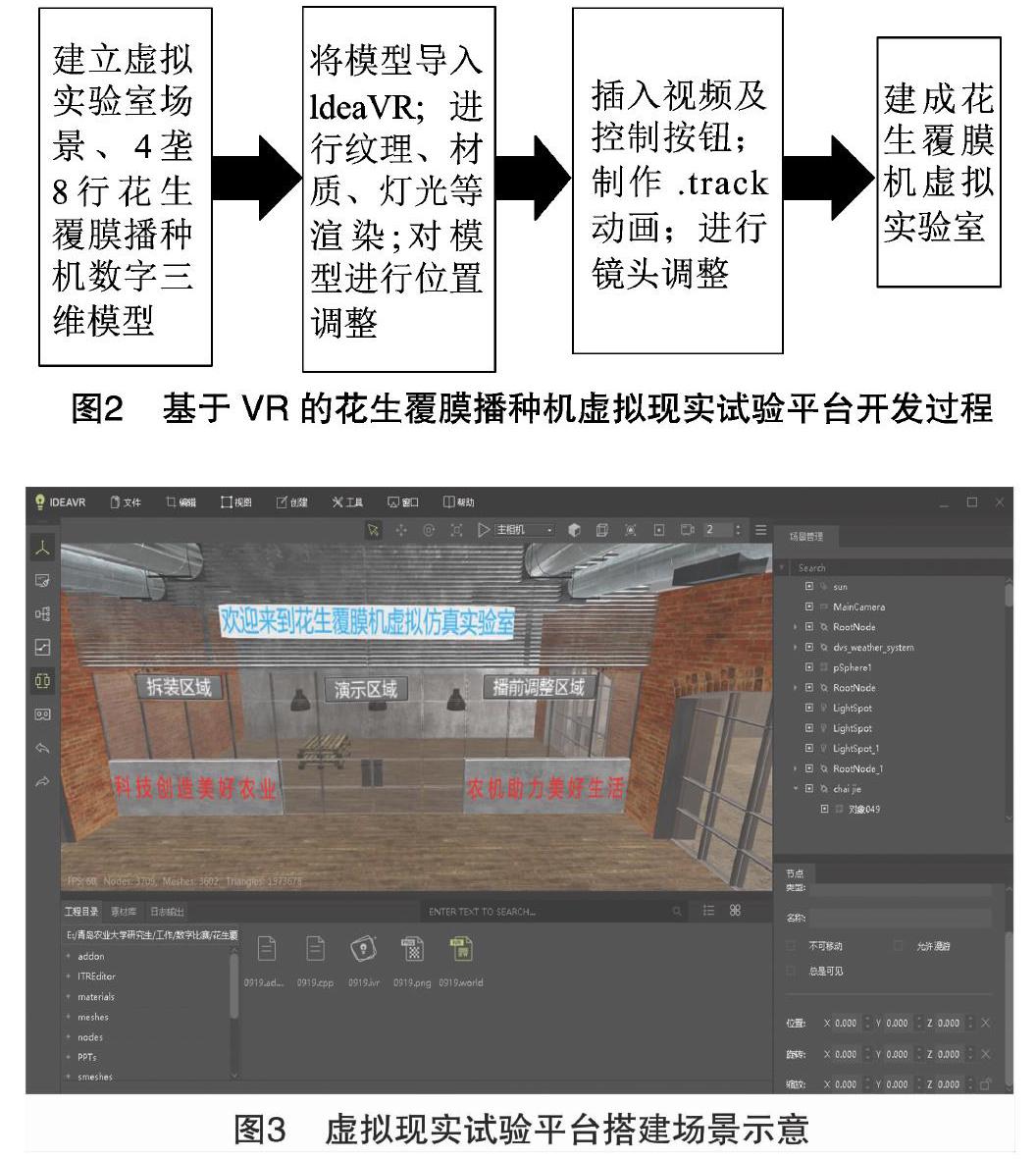
首先,分析花生覆膜联合作业播种机的工作原理,获取相应的技术参数,并利用solid works软件,构建播种机的三维模型,从而实现播种机整机的装配;利用3DS Max软件,进行格式转化与模型优化。然后,在此基础上利用VR、3D仿真等虚拟现实开发技术,通过IdeaVR创作引擎等虚拟现实开发工具,将制作好的播种机三维数字模型导入到场景中,并对材质、环境进行虚拟现实引擎所独有的实时渲染,开发出花生覆膜联合作业播种机虚拟仿真实践场景,阐述实践场景的软硬件平台组成、搭建流程及功能,对虚拟现实场景搭建中用到的方法、流程步骤和关键技术进行研究。最后,完成虚拟仿真实践系统的设计与开发,通过该系统,用户能够学习播种机的基础知识并且进行虚拟拆装,同时实现与花生播种机的虚拟交互。基于VR的花生覆膜播种机虚拟现实试验平台开发过程见图2,搭建完成的场景示意见图3。
1.1 拆装区域场景搭建
花生覆膜播种机的基本结构包括悬挂架、种箱、排种器、仿形装置、地轮、传动装置、覆土装置等。将导入的由SolidWorks绘制的数字三维模型进行模型渲染并利用交互编辑器进行拆装逻辑制作,同时为平行四边形折叠梁架、覆土轮、种箱等主要部件增加布告板标识,在点击对应部件时实现布告板同步显示。
1.3 播前调整区域场景搭建
播前调整区域的主要功能展示4垄8行花生覆膜播种机在播种作业前的调整准备工作,主要包括穴距调整、覆土轮调整、排肥量调整、拉伸划线器等几个主要状态调整,在此场景中,可以引导学生进行模拟调整,并且在调整界面设有演示视频,学生可以参照进行相应操作。显示状态示意见图8。
在操作过程中,使用配套手柄切换至播前调整区域,通过手柄射线点击界面左侧“排肥量调整”按钮,按钮有凹感,同时镜头切向调整界面(图9)。调整完成后,画面会自动切换到主界面,按钮出现凸感,依次点击剩余按钮,显示相应调整界面。后期可以根据不同机具,模拟不同的状态调整,丰富学生认知。学生操作过程中如遇困难,可以点击右侧一列演示按钮,点击后,按钮呈现凹感,播放对应演示视频。此处,以排肥量调整为例,阐述镜头切换交互编辑过程。首先打开动画编辑器交互界面,设定Time与Value值,选择要切换的画面,设定开始结束位置,生成 .track的动画文件。然后打开交互编辑页面,选择逻辑单元,以“排肥量调整”按钮作为触发对象,以鼠标作为操作对象,调入任务框、对象框、触发框及动画,同时选取逻辑单元中Pyhton脚本中的“触发节点选项”,任务框中勾选“激活”,输出端“开始”链接触发框“激活”,选择对象框“输出节点”链接触发框“输入节点”。最后将触发框“左击”输出点与视频文件“播放”输入点链接,保存,此交互编辑节点便完成。
2 结论
本研究将虚拟现实仿真技术与大型农业装备——4垄8行花生覆膜播种机相结合,通过SolidWorks软件进行三维数字建模,利用Idea VR创作引擎完成了花生覆膜播种机虚拟现实仿真试验平台开发,可实现装备虚拟拆装、模型动态演示、场景漫游等功能的演示和在线模仿真实工作场景、节点操作、参数调整的虚拟操作。该虚拟现实仿真试验平台的开发,打破了时间、地点的限制,学生可随时随地进行训练,研发人员可以随时随地进行产品设计检验,改变了传统的视频教学动画演示、实地操作培训的实训模式,利用3D虚拟现实的良好沉浸感和交互性,摆脱学生过于依赖教科书和物体的现实,突破传统的教学方法,将课堂从“二维”扩展到“三维”,从静态扩展到动态,学生从被动式学习模式转变为互动式学习,有效地帮助学生理解教学内容,最大限度地调动学生的学习积极性,培养其动手能力和创新能力,使教学内容更加逼真形象、教学过程更加生动灵活。同时,虚拟现实仿真试验平台可以循环使用,损耗少,而且试验平台接入数据库后可以提供更多的仿真场景,解决了如下问题:传统机械实验室由于部件体积大、部件笨重造成拆装不便;由于部件数量较少且部件易损坏造成试验器具紧缺,可提高学生实验室操作水平,提升实训质量。该平台与教师实验室教学相互补充,为学生提供开放便利的使用环境,同时缓解试验设备紧张、减少实验室设备维护次数,从而节省资金。该虚拟现实仿真试验平台已在青岛农业大学机电工程学院农业机械制造专业使用,学生对相应的知识接受快、理解深,有利于教师课堂教学;同时该虚拟现实仿真试验平台的开发为其他专业特别是大型复杂装备的设计研发、试验操作等提供了思路,推广应用价值高。
参考文献:
[1]曾建超,俞志和. 虚拟现实的技术及其应用[M]. 北京:清华大学出版社,1996.
[2]何江华,郭果敢. 计算机仿真与军事应用[M]. 北京:国防工业出版社,2006.
[3]Heilig M L. Sensorama simulator:US3050870 [P]. 1962-08-28.
[4]陈定方,罗亚波. 虚拟设计[M]. 北京:机械工业出版社,2003.
[5]何 伟. Unity虚拟现实开发圣典[M]. 北京:中国铁道出版社,2016.
[6]Krueger M W,Gionfriddo T,Hinrichsen K. VIDEOPLACE—an artificial reality[J]. Acm Sigchi Bulletin,1985,16(4):35-40.
[7]何晓宁,尚书旗,王东伟,等. 2 MB-2/4型夏花生灭茬覆膜播种联合作业机的研究[J]. 农机化研究,2016(1):212-216.
[8]王东伟,尚书旗,何晓宁,等. 可折叠式四垄八行大型花生播种机:CN205266167U [P]. 2016-06-01.
