基于OpenMV的目标方位追踪算法
2021-09-12姚志强赵恩铭杨松杨燕婷刘光宇周豹王辰朱晓栋
姚志强 赵恩铭 杨松 杨燕婷 刘光宇 周豹 王辰 朱晓栋
摘 要:提出一种基于OpenMV的目标方位追踪算法.算法以机器视觉模块OpenMV为图像输入及处理平台,通过自带的摄像头采集目标图像信息,使用通用加速分割检测算法(AGAST)获取目标的特征点,将采集到的特征点与目标特征进行匹配,达到追踪目标并检测其方位信息的目的.实验结果表明,该算法在目标方位追踪上具有较高的准确率.
关键词:目标追踪;AGAST;局部不变特征
[中图分类号]TP391.4 [文献标志码]A
Abstract:This paper presents an algorithm for target location tracking based on OpenMV.The algorithm takes the machine vision module OpenMV as the image input and processing platform,collects the target image information through the built-in camera,uses the General Accelerated Segmentation Detection Algorithm (AGAST) to obtain the target feature points,matches the collected feature points with the target features,and achieves the purpose of tracking the target and detecting its azimuth information.Experimental results show that the algorithm has high accuracy in target azimuth tracking.
Key words:target tracking;AGAST;local invariant features
目标追踪是机器视觉中重要的研究方向,在日常生活中有着广泛的应用.[1-2]特征匹配法[3]是目标追踪的主流方法,根据特征点灰度值与其邻近点灰度值差异,进行图像匹配.特征点检测算法主要有Rosten[4]等人提出的FAST(Features from Accelerated Segment Test)算法和Mair[5]等人提出的AGAST(adaptive and generic accelerated segment test)算法.FAST算法的运算量小,实时性高,但在图像发生变换时鲁棒性较差;AGAST算法准确率高、追踪效果好,但计算复杂性略有增加.本文以机器视觉模块OpenMV为图像输入及处理平台,通过自带摄像头采集目标图像信息,使用通用加速分割检测算法(AGAST)获取目标的特征点,将采集到的特征点与目标特征进行匹配,实现目标方位追踪算法,达到追踪目标并检测其方位信息的目的.
1 系统总体设计
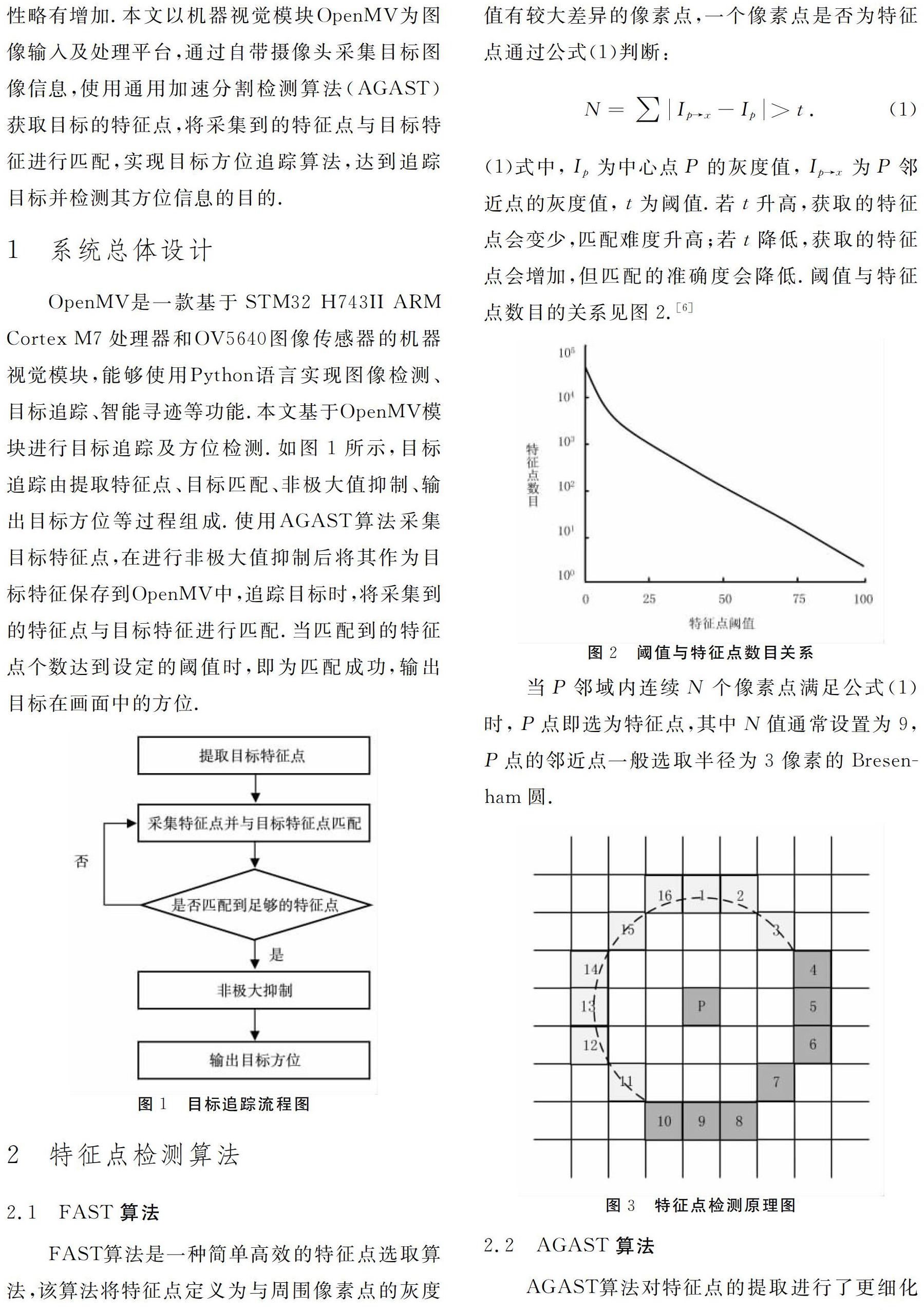
OpenMV是一款基于STM32 H743II ARM Cortex M7处理器和OV5640图像传感器的机器视觉模块,能够使用Python语言实现图像检测、目标追踪、智能寻迹等功能.本文基于OpenMV模块进行目标追踪及方位检测.如图1所示,目标追踪由提取特征点、目标匹配、非极大值抑制、输出目标方位等过程组成.使用AGAST算法采集目标特征点,在进行非极大值抑制后将其作为目标特征保存到OpenMV中,追踪目标时,将采集到的特征点与目标特征进行匹配.当匹配到的特征点个数达到设定的阈值时,即为匹配成功,输出目标在画面中的方位.
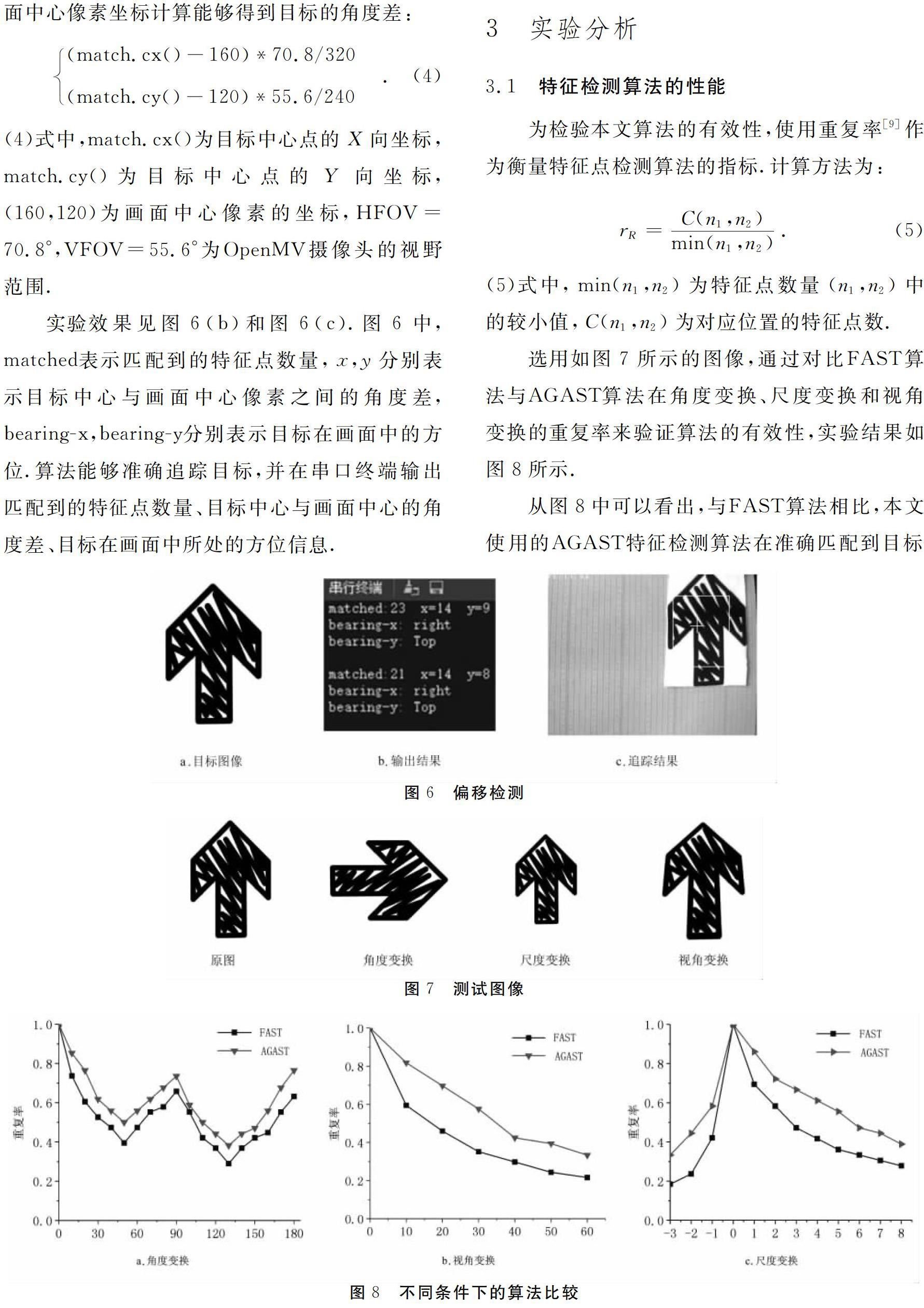
选用如图7所示的图像,通过对比FAST算法与AGAST算法在角度变换、尺度变换和视角变换的重复率来验证算法的有效性,实验结果如图8所示.
从图8中可以看出,与FAST算法相比,本文使用的AGAST特征检测算法在准确匹配到目标的同时,对于各种变换都具有良好的不变性,具有较高的鲁棒性,能够满足目标追踪及方位检测的要求.
3.2 目标方位检测性能
为验证目标方位识别的准确性,从角度、视角和尺度三个方面进行对比实验,测试方位检测算法在不同变换下输出方位的绝对误差,绝对误差越小,表示算法的稳定性越高.
图9为FAST算法与AGAST算法在不同变换下对图7所示图片的绝对误差比较图.可以看出,AGAST算法在各种变化下依然具有良好的鲁棒性,整体上优于FAST算法,尤其在视角变换较大的情况下,依然能够保持较低的绝对误差.因此,基于AGAST算法进行目标方位检测能够取得更好的效果,可有效降低各种变换对目标追踪的影响.
4 结束语
提出一种基于OpenMV的目标方位追踪算法,解决了基于OpenMV的目标追踪算法没有目标方位信息的问题.采用AGAST算法提取目标特征点,通过改进传统的目标追踪算法从而获取目标所在方位.实验结果表明,基于OpenMV的AGAST算法能够有效追踪目标并能准确识别目标方位,与FAST算法相比,具有重复率高的优势,对旋转变化、尺度变化和视角变化都具有良好的鲁棒性.
参考文献
[1]王力超,罗建,刘丙友,等.基于机器视觉的智能小车导航系统研究[J].牡丹江师范学院学报:自然科学版,2019(1):29-33.
[2]曹萍萍,刘升.Android平台人脸识别方法研究[J].牡丹江师范学院学报:自然科学版,2018(4):27-30.
[3]杨晓敏,吴炜,卿粼波,华骅,何小海.图像特征点提取及匹配技术[J].光学精密工程,2009,17(09):2276-2282.
[4]Rosten E.Machine learning for very high-speed corner detection[J].ECCV'06,May,2006.
[5]Mair E,Hager G D,Burschka D,et al.Adaptive and Generic Corner Detection Based on the Accelerated Segment Test[J].European Conference on Computer Vision-eccv,2010.
[6]Rosten E,Drummond T .Fusing points and lines for high performance tracking[C]// Tenth IEEE International Conference on Computer Vision.IEEE,2005.
[7]张岩,李建增,李德良,等.快速鲁棒性非线性尺度不变的特征匹配算子[J].西北工业大学学报,2016,34(6):1108-1119.
[8]葛林,于鸣,任洪娥.基于快速尺度空间的无人机影像自适应稳像方法[J].电光与控制,2019,26(2):32-37.
[9]刘佳,顾爽,张小瑞,等.基于加速分割检测的移动增强现实跟蹤注册算法[J].计算机应用研究,2018,35(10):3121-3125.
编辑:琳莉
