四自由度高速抓取新型并联机器人动力学分析
2021-09-12宋海霞宋萌萌翁伟何建华尤燕玲葛炎风
宋海霞 宋萌萌 翁伟 何建华 尤燕玲 葛炎风

摘 要:为了解决传统生产模式手工人工成本高、生产效率低、人工安全等问题,本文基于四自由度高速抓取新型并联机器人的结构特点,利用SolidWorks软件搭建并联机器人的三维模型,使用ANSYS进行动力学分析。结果显示本文研究对象在实际应用中能够承载一定的受力载荷,同时改进作业中的限制因素,后期还可以对其进行深度优化设计,为ADAMS轨迹运行分析提供模型基础。
关键词:并联机器人;SolidWorks;ANSYS;动力学分析
中图分类号:TP242 文献标识码:A 文章编号:1673-260X(2021)08-0030-04
1 引言
随着时代的变迁,信息技术的快速发展和集成领域的不断发展,为轻工业提供了新的动力,未来发展机遇与挑战并存[1,2]。在过去,工业生产的流水线需要大量的人工,而人工劳动安全和人工费用是难以平衡的因素。这时,便有了用机器代替人工这个概念出现,使人工转变为人工智能。
机器人是具有高技术、高自动化的机构,是当今生产劳动的一大助力[3,4]。自动化生产的步伐和生产方面的自动化推进使生产能耗大大降低,并且在产品快速更迭和改善工作环境等方面发挥了积极的作用。
纵观国内外的并联抓取机器人[5-8],目前已经获得了许多方面的技术突破,同时具有广阔的潜在应用市场。在我国,得益于前沿科学家的不懈努力,目前在高新智能机器人领域也是硕果累累。其中,中国空间科学技术研究院研制的嫦娥五号刚刚登陆月球。嫦娥五号是我国首个实现月球表面无人采样和返回的月球探测器,成为我国探月工程战略的关键步骤。此外,我国还研发了人形机器人、外骨骼辅助机器人、假肢类人工智能机器人、水下管道修复机器人、快速焊接机器人等等各种不同类型的机器人。同时,也在机器人的各种五感方面如听、闻、说、触等较为基础技术的研发和实际应用层面都展开了大量工作,具备了坚实的发展基础与制造技术。但可惜的是,我国机器人的研究和应用刚刚起步,这方面的进步相比國外先进高新技术还略有差距。
本文基于以上问题,提出一个能实现工件在流水线上能够摆放至正确位置且能快速完成摆放动作的机器人,此研究具有现实意义。本文以四自由度并联高速抓取新型机器人为研究对象。利用SolidWorks软件搭建并联机器人的三维模型,使用ANSYS[9-11]进行动力学分析。研究表明研究对象在实际应用中可承受一定的受力载荷,并改进作业中的限制因素,对系统进行优化升级,为后续研究创造模型基础。
2 四自由度并联机器人三维模型搭建
2.1 四自由度并联机器人模型分析
对Delta机构特点进行综合与优化,设计了一种基于变换杆长平行四边形结构的新型并联机构,并且该机构在二维平面上具有二维运动。若将三维空间以XYZ三轴平面划分,则该平行四边形机构置于XY平面上,动连杆BC便有了X、Y方向的移动;若置于XZ平面上,动连杆BC便有了X、Z方向的移动;同理,该平行四边形机构在YZ平面上也具有Y、Z方向的移动。因此,本文将阐述如何使四自由度并联机构的动平台产生三平一转,并使用SolidWorks软件进行机器人模型的三维建立。
2.2 四自由度并联机器SolidWorks三维模型建立
本文根据Delta的结构特点构建了机器人的机构简图1,并确定了机器人动平台的三平一转。并在SolidWorks软件中搭建四自由度并联机器人支链的三维模型,如图2所示。
该支链以一个42步进减速电机为驱动,电机外部连接同步轮,通过同步轮来传递驱动力。两个摆臂之间通过平行杆1来实现同步运动,并且下半部分和轴框上的圆孔用销联接,使其产生分别绕A点和D点的旋转。连杆与皮带夹固定连接,皮带夹夹住皮带,通过电机传动的力,经过皮带与齿轮的转换,变为沿皮带的往复运动,使动连杆产生上下的平移。
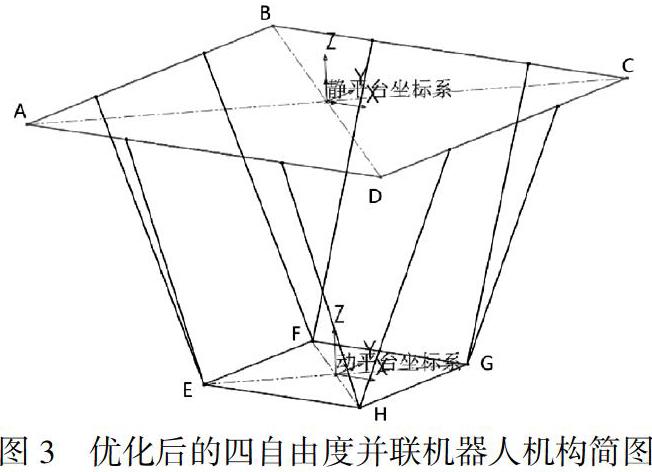
但在图1所示的机构简图中,考虑到动平台在实际生产应用时,连杆有可能会超出工作空间,所以,应对该四自由度并联机器人的机构进行优化,得到机器人机构简图如图3所示。
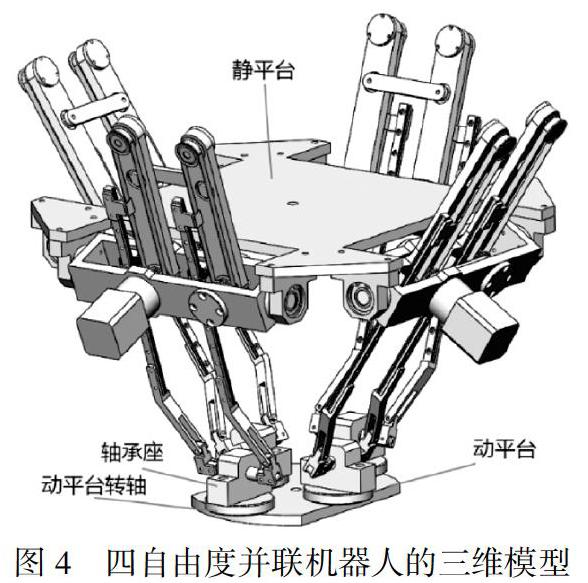
最后,在按照图3所示的机构简图进行机器人的三维建模与装配,得到的三维模型如图4所示。
如上图所示,四个支链分别以矩形对称的形式安装在静平台上,动连杆连接底部的轴承座,轴承座再与动平台转轴固定连接。缩小了底部动平台的尺寸,增大了支链上连杆和动平台的空间移动范围。
3 四自由度并联机器人ANSYS动力学仿真分析
并联机构相较于串联机构具有质量轻盈、抗弯折能力强、精准度高、载荷能力强等特点,随着科技的进步和工业生产能效的提高,对机构的高精度、高速度、轻量化的发展更加重视。因此,机构动态特性的研究越来越重要。模态分析是最基本的线性动力分析,用于分析结构的固有频率特性,包括固有频率、振型及振型参与系数。本文对经过简化的四自由度并联机器人机构和单个平行四边形支链机构进行模态分析,并通过对单个平行四边形支链机构的模态分析结果进行谐响应分析。
四自由度并联机器人的模型为复杂的空间几何构件,若直接在ANSYS中导入模型并分析,会导致计算量过于庞大。因此,在保证分析结果准确性的前提下,对实体模型进行简化。
以SolidWorks建模为基础,按1:1的比例简化实体模型后,添加6061铝合金材料,弹性模量为68.9GPa,泊松比为0.330,密度为2750kg/m3。网格划分采用自由划分。划分网格后在ANSYS中进行有限元分析。
3.1 基于ANSYS对单个支链机构进行模态分析
在ANSYS中导入单个支链机构的三维模型。所选的材料为6061铝合金.网格划分采用自由划分。划分网格后单个支链机构的有限元模型如图5所示。
经过ANSYS分析和求解,得到了如表1所示的机构的前6阶固有频率及如图6所示的对应的振动动画截图。
观察图6,支链机构的连杆底部和动连杆在第1、3、5、6阶振型图中沿XY平面的位移最大;支链机构的摆臂在第1、4、5、6阶振型图中沿XY平面的位移最大;支链机构在第2阶振型图中较为平稳。
综上所述,支链机构的固有频率应保持在194.55Hz左右。
3.2 单个支链机构谐响应分析
3.2.1 沿X轴方向的谐响应分析
将单个支链的三维模型导入ANSYS中,经过ANSYS分析和求解,得到如表2所示机构的前10阶固有频率及如图7所示对应的振动动画截图。
通过观察各频率下的谐响应分析,可知当频率为105Hz时位移响应值最大。其位移响应云图如图8所示。
如图9所示为支链的连杆谐响应结果。
3.2.2 沿Y轴方向的谐响应分析
同样的,将单个支链的三维模型导入ANSYS中,经过ANSYS分析和求解,得到如表3所示机构的前10阶固有频率及如图10所示对应的振动动画截图。
如图12所示为支链连杆沿Y轴方向的谐响应结果。
通过观察各频率下的谐响应分析,可知当频率为162Hz时位移响应值最大。其位移响应云图如图11所示。
从两段的谐响应分析图可以看出,支链上连杆沿X、Y方向的曲线走向是向上的,说明改支链沿X、Y方向的刚度相近,这是因为机构结构是由矩形对称形式组成的。在第5、8、9、10階固有频率附近,支链在X、Y方向上的响应最大,在其它固有频率处的共振幅度较小,说明该支链对105Hz和162Hz的频率的外力最为敏感,所以,为了保证机构在运行时的稳定和精准度,应该避开这两个频率。
4 总结
本文以典型的Delta机构为例,根据其并联结构的特点,建立了平行四边形机构的运动简图,并在SolidWorks软件中搭建四自由度的并联机器人三维模型。在ANSYS软件中对单个支链机构进行了模态分析和谐响应分析,确定了机构在实际应用中足以承载一定的受力载荷,并且通过ANSYS求解出机构在运行时应该避开的一些条件,对四自由度并联机器人的机构进行优化设计,为后续ADAMS运动轨迹分析提供模型基础。
参考文献:
〔1〕刘善增,余跃庆,刘庆波,等.Dynamic Analysis of 3-RRC Parallel Manipulator%3-(R)RC并联机器人动力学分析[J].机械工程学报,2009,45(05):220-224.
〔2〕盛永超,李跃文,贾永皓,等.新型高速抓取并联机器人平台的设计与分析[J].动力系统与控制,2019, 08(01):28-39.
〔3〕山显雷,程刚.高速运动下并联机器人主动支链的动力学耦合特性[J].机器人,2017,39(05):603-607.
〔4〕朱伟,郭倩,马致远,等.SCARA并联机构刚度和动力学分析[J].农业机械学报,2019,50(04):40-46.
〔5〕伍超.并联机器人的模糊滑模跟踪控制研究[J].赤峰学院学报(自然版),2016,32(07):57-58.
〔6〕吴高华,杨依领,李国平,等.具有高位移增幅特性的柔顺并联式微动平台[J].机器人,2020,42(01):1-9.
〔7〕伊雪飞.基于边界搜索法的一种四自由度并联机器人工作空间分析[J].自动化技术与应用,2015, 34(06):51-56.
〔8〕胡世军,望扬,杨志云.基于ANSYS的Delta并联机器人主动臂静力学和模态分析[J].机械制造与自动化,2018,47(05):181-183.
〔9〕韩书葵,刘卫,田东兴.基于SOLIDWORKS和ANSYS的三自由度并联微动机器人力学性能分析[J].北华航天工业学院学报,2016,26(04):1 -3.
〔10〕杨春辉.三自由度平面并联微动机器人运动学模型及工作空间分析[J].机械传动,2010,34(01):16-18.
〔11〕何庆稀,游震洲,孔向东.一种基于位姿反馈的工业机器人定位补偿方法[J].中国机械工程,2016,27(07):872-876.